深蓝学院视觉slam十四讲第5章作业
 2.1
2.1
// compute the angle
void computeAngle(const cv::Mat &image, vector<cv::KeyPoint> &keypoints) {
int half_patch_size = 8;
for (auto &kp : keypoints) {
float m01 = 0, m10 = 0;
//从(u − 8, v − 8) 取到 (u + 7, v + 7)
if (kp.pt.x < half_patch_size || kp.pt.y < half_patch_size ||
kp.pt.x > image.cols - half_patch_size || kp.pt.y > image.rows - half_patch_size) {
continue;
}
else{
for(int row = -half_patch_size; row < half_patch_size; ++row){
const auto *row_ptr = image.ptr<uchar>(kp.pt.y + row);
for(int col = -half_patch_size; col < half_patch_size; ++col){
const auto *data_ptr = &row_ptr[size_t(kp.pt.x + col) * image.channels()];
uchar pixel = *data_ptr;
m10 += col * pixel;
m01 += row * pixel;
}
}
// cout << "m10:" << m10 << " m01:" << m01 << endl;
}
kp.angle = std::atan2(m01,m10)/CV_PI*360; // compute kp.angle
// END YOUR CODE HERE
// cout << "kp.pt:" << kp.pt << " kp.size:" << kp.size << " kp.angle:" << kp.angle <<
// " kp.response:" << kp.response << " kp.octave:" << kp.octave << " kp.class_id:" << kp.class_id << endl;
}
return;
}
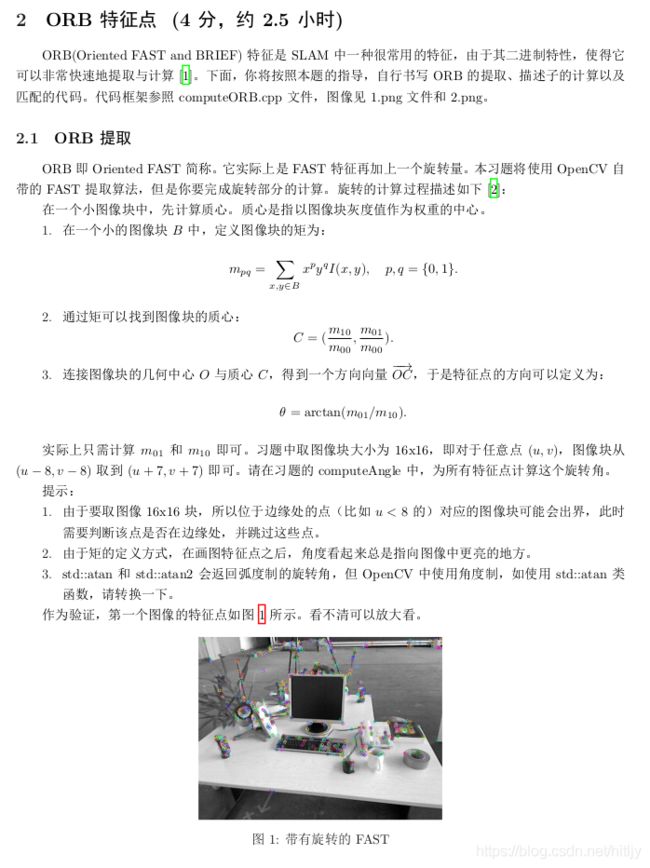
计算角度后画出特征点结果:

2.2
// compute the descriptor
void computeORBDesc(const cv::Mat &image, vector<cv::KeyPoint> &keypoints, vector<DescType> &desc) {
// int maxi = 0;
// for(int i = 0; i < 256*4; i++)
// {
// if(abs(ORB_pattern[i]) > maxi){
// maxi = abs(ORB_pattern[i]);
// }
// }
// cout << "maxi:" << maxi << endl;
// cout << "cos60:" << cos(60) << endl;
// cout << "cos(CV_PI/3):" << cos(CV_PI/3) << endl;
for (auto &kp: keypoints) {
DescType d(256, false);
bool IFOutBound = false;
for (int i = 0; i < 256; i++) {
cv::Point2f p(ORB_pattern[i * 4], ORB_pattern[i * 4 + 1]);
cv::Point2f q(ORB_pattern[i * 4 + 2], ORB_pattern[i * 4 + 3]);
float cos_theta = cos(kp.angle/360.0*CV_PI);
float sin_theta = sin(kp.angle/360.0*CV_PI);
// rotate with theta
cv::Point2i pp = cv::Point2i(int(cos_theta * p.x - sin_theta * p.y + kp.pt.x), int(sin_theta * p.x + cos_theta * p.y + kp.pt.y));
cv::Point2i qq = cv::Point2i(int(cos_theta * q.x - sin_theta * q.y + kp.pt.x), int(sin_theta * q.x + cos_theta * q.y + kp.pt.y));
if (pp.x < 0 || pp.y < 0 || pp.x >= image.cols || pp.y >= image.rows ||
qq.x < 0 || qq.y < 0 || qq.x >= image.cols || qq.y >= image.rows) {
IFOutBound = true;
continue;
}
d[i] = image.at<uchar>(pp.y, pp.x) <= image.at<uchar>(qq.y, qq.x);
// END YOUR CODE HERE
}
if(!IFOutBound){
desc.push_back(d);
}
else{
desc.push_back({});
}
}
int bad = 0;
int numd = 0;
for (auto &d: desc) {
// cout << "numd:" << numd << endl;
numd++;
if (d.empty()) bad++;
else{
// for(int i = 0; i < d.size(); i++){
// cout << d[i] << " ";
// }
for(auto && i : d){
// cout << i << " ";
}
}
// cout << endl;
}
cout << "bad/total: " << bad << "/" << desc.size() << endl;
return;
}
2.3
// brute-force matching
void bfMatch(const vector<DescType> &desc1, const vector<DescType> &desc2, vector<cv::DMatch> &matches) {
double starttime = (double) cv::getTickCount();
int d_max = 50;
// START YOUR CODE HERE (~12 lines)
// find matches between desc1 and desc2.
for (int i1 = 0; i1 < desc1.size(); ++i1) {
if (desc1[i1].empty()) continue;
cv::DMatch m{i1, -1, 256};
for (int i2 = 0; i2 < desc2.size(); ++i2) {
if (desc2[i2].empty()) continue;
int distance = 0;
for (int j = 0; j < 256; j++) {
distance += (desc1[i1][j] == desc2[i2][j])?0:1;
}
// cout << i1 << "test" << i2 << "distance:" << distance << endl;
if (distance < d_max && distance < m.distance) {
m.distance = distance;
m.trainIdx = i2;
cout << i1 << "match" << i2 << "distance:" << distance << endl;
}
}
if (m.distance < d_max) {
matches.push_back(m);
}
}
// END YOUR CODE HERE
// for (auto &m: matches) {
// cout << m.queryIdx << ", " << m.trainIdx << ", " << m.distance << endl;
// }
double bfMatchtime = ((double) cv::getTickCount() - starttime) / cv::getTickFrequency();
cout << "bfMatchtime: " << bfMatchtime << endl;
return;
}
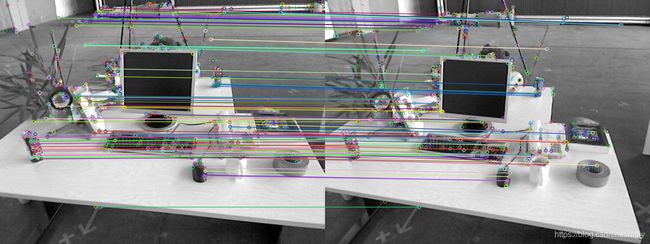
运行结果:
bfMatchtime: 0.125921
matches: 95
问题回答:
- 因为ORB采用二进制的描述子用来描述每个特征点的特征信息
- 50是经验值,取更大有更多误匹配,取更小匹配的点较少
- 0.125921 秒,使用快速近似最邻近法(FLANN)可以减少时间
#include 
#include 运行结果:
问题回答:
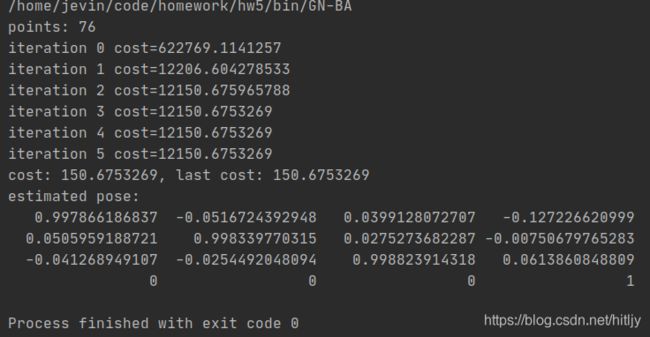
- 3D点的投影位置与观测位置作差


- 左乘或右乘微小扰动exp(dx)
代码中给出左乘写法,下图为右乘写法运行结果,由于数值计算原因迭代次数更多
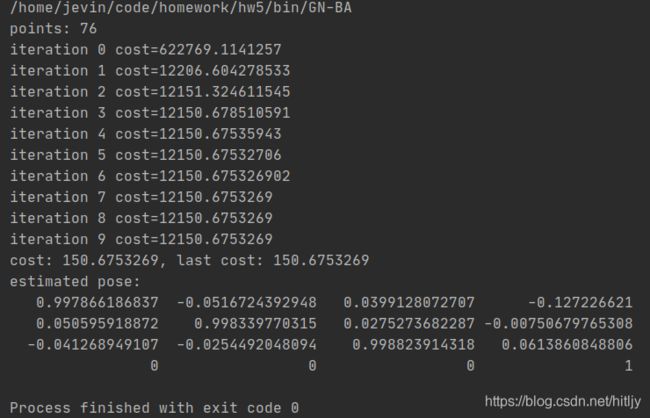
#include 运行结果: