NRF51822自学笔记(二)PWM
PWM这个东西我在32上用来电机调速过……通过改变高低电平占空比来实现一些功能。
keil的nrf51822目录下没有pwm.c..就在网上找了个pwm蜂鸣器的例程……看画风应该是官方的……吧……
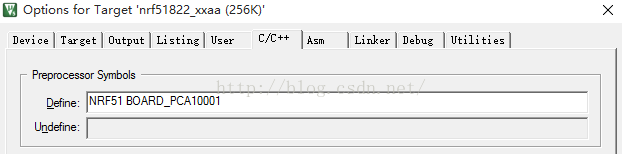
例程的define为NRF51 SETUPA BOARD_PCA10028..修改一下,设置如下。

然后通过两个灯来实现一下两路pwm波……pin为20和21的LED_2和LED_3
先看main.c(非例程)
#include
#include
#include "nrf_delay.h"
#include "nrf_gpio.h"
#include "boards.h"
#include "nrf_pwm.h"
/**
* @brief Function for application main entry.
*/
int main(void)
{
// Configure LED-pins as outputs
nrf_gpio_cfg_output(20);
nrf_gpio_cfg_output(21);
nrf_pwm_config_t pwm_config = PWM_DEFAULT_CONFIG;
pwm_config.mode = PWM_MODE_LED_255;
pwm_config.num_channels = 2;
pwm_config.gpio_num[0] = 21;
pwm_config.gpio_num[1] = 20;
nrf_pwm_init(&pwm_config);
nrf_pwm_set_value(0,20);
nrf_pwm_set_value(1,255);
} 第一步把要操作的灯的pin配置一下,设置成outputs
第二步用一个结构体来设置一下PWM的一些参数。
追踪一下PWM_DEFAULT_CONFIG,发现它在PWM.H里
#define PWM_DEFAULT_CONFIG {.num_channels = 2, \
.gpio_num = {8,9,10,11}, \
.ppi_channel = {0,1,2,3,4,5,6,7}, \
.gpiote_channel = {2,3,0,1}, \
.mode = PWM_MODE_LED_100};追踪一下那个mode
typedef enum
{
PWM_MODE_LED_100, // 0-100 resolution, 156Hz PWM frequency, 32kHz timer frequency (prescaler 9)
PWM_MODE_LED_255, // 8-bit resolution, 122Hz PWM frequency, 32kHz timer frequency (prescaler 9)
PWM_MODE_LED_1000, // 0-1000 resolution, 125Hz PWM frequency, 250kHz timer frequency (prescaler 6)
PWM_MODE_MTR_100, // 0-100 resolution, 20kHz PWM frequency, 2MHz timer frequency (prescaler 3)
PWM_MODE_MTR_255, // 8-bit resolution, 31kHz PWM frequency, 8MHz timer frequency (prescaler 1)
PWM_MODE_BUZZER_255 // 8-bit resolution, 62.5kHz PWM frequency, 16MHz timer frequency (prescaler 0)
} nrf_pwm_mode_t;uint32_t nrf_pwm_init(nrf_pwm_config_t *config)
{
if(config->num_channels == 0 || config->num_channels > PWM_MAX_CHANNELS) return 0xFFFFFFFF;
switch(config->mode)
{
case PWM_MODE_LED_100: // 0-100 resolution, 321Hz PWM frequency, 32kHz timer frequency (prescaler 9)
PWM_TIMER->PRESCALER = 9;
pwm_max_value = 100;
break;
case PWM_MODE_LED_255: // 8-bit resolution, 122Hz PWM frequency, 32kHz timer frequency (prescaler 9)
PWM_TIMER->PRESCALER = 9;
pwm_max_value = 255;
break;
case PWM_MODE_LED_1000: // 0-1000 resolution, 250Hz PWM frequency, 250kHz timer frequency (prescaler 6)
PWM_TIMER->PRESCALER = 6;
pwm_max_value = 1000;
break;
case PWM_MODE_MTR_100: // 0-100 resolution, 20kHz PWM frequency, 2MHz timer frequency (prescaler 3)
PWM_TIMER->PRESCALER = 3;
pwm_max_value = 100;
break;
case PWM_MODE_MTR_255: // 8-bit resolution, 31kHz PWM frequency, 8MHz timer frequency (prescaler 1)
PWM_TIMER->PRESCALER = 1;
pwm_max_value = 255;
break;
case PWM_MODE_BUZZER_255: // 8-bit resolution, 62.5kHz PWM frequency, 16MHz timer frequency (prescaler 0)
PWM_TIMER->PRESCALER = 0;
pwm_max_value = 255;
break;
default:
return 0xFFFFFFFF;
}
pwm_cc_update_margin_ticks = pwm_cc_margin_by_prescaler[PWM_TIMER->PRESCALER];
pwm_num_channels = config->num_channels;
for(int i = 0; i < pwm_num_channels; i++)
{
pwm_io_ch[i] = (uint32_t)config->gpio_num[i];
nrf_gpio_cfg_output(pwm_io_ch[i]);
pwm_running[i] = 0;
pwm_gpiote_channel[i] = config->gpiote_channel[i];
}
PWM_TIMER->TASKS_CLEAR = 1;
PWM_TIMER->BITMODE = TIMER_BITMODE_BITMODE_16Bit;
PWM_TIMER->CC[2] = pwm_next_max_value = pwm_max_value;
PWM_TIMER->MODE = TIMER_MODE_MODE_Timer;
PWM_TIMER->SHORTS = TIMER_SHORTS_COMPARE2_CLEAR_Msk;
PWM_TIMER->EVENTS_COMPARE[0] = PWM_TIMER->EVENTS_COMPARE[1] = PWM_TIMER->EVENTS_COMPARE[2] = PWM_TIMER->EVENTS_COMPARE[3] = 0;
if(pwm_num_channels > 2)
{
PWM_TIMER2->TASKS_CLEAR = 1;
PWM_TIMER2->BITMODE = TIMER_BITMODE_BITMODE_16Bit;
PWM_TIMER2->CC[2] = pwm_next_max_value = pwm_max_value;
PWM_TIMER2->MODE = TIMER_MODE_MODE_Timer;
PWM_TIMER2->SHORTS = TIMER_SHORTS_COMPARE2_CLEAR_Msk;
PWM_TIMER2->EVENTS_COMPARE[0] = PWM_TIMER2->EVENTS_COMPARE[1] = PWM_TIMER2->EVENTS_COMPARE[2] = PWM_TIMER2->EVENTS_COMPARE[3] = 0;
PWM_TIMER2->PRESCALER = PWM_TIMER->PRESCALER;
}
for(int i = 0; i < pwm_num_channels && i < 2; i++)
{
ppi_enable_channel(config->ppi_channel[i*2], &PWM_TIMER->EVENTS_COMPARE[i], &NRF_GPIOTE->TASKS_OUT[pwm_gpiote_channel[i]]);
ppi_enable_channel(config->ppi_channel[i*2+1],&PWM_TIMER->EVENTS_COMPARE[2], &NRF_GPIOTE->TASKS_OUT[pwm_gpiote_channel[i]]);
pwm_modified[i] = false;
}
for(int i = 2; i < pwm_num_channels; i++)
{
ppi_enable_channel(config->ppi_channel[i*2], &PWM_TIMER2->EVENTS_COMPARE[i-2], &NRF_GPIOTE->TASKS_OUT[pwm_gpiote_channel[i]]);
ppi_enable_channel(config->ppi_channel[i*2+1],&PWM_TIMER2->EVENTS_COMPARE[2], &NRF_GPIOTE->TASKS_OUT[pwm_gpiote_channel[i]]);
pwm_modified[i] = false;
}
#if(USE_WITH_SOFTDEVICE == 1)
sd_radio_session_open(nrf_radio_signal_callback);
#else
NVIC_SetPriority(PWM_IRQn, 0);
NVIC_EnableIRQ(PWM_IRQn);
#endif
apply_pan73_workaround(PWM_TIMER, true);
PWM_TIMER->TASKS_START = 1;
if(pwm_num_channels > 2)
{
apply_pan73_workaround(PWM_TIMER2, true);
PWM_TIMER2->TASKS_START = 1;
}
return 0;
}void nrf_pwm_set_value(uint32_t pwm_channel, uint32_t pwm_value)
{
pwm_next_value[pwm_channel] = pwm_value;
pwm_modified[pwm_channel] = true;
#if(USE_WITH_SOFTDEVICE == 1)
nrf_radio_request_t radio_request;
radio_request.request_type = NRF_RADIO_REQ_TYPE_EARLIEST;
radio_request.params.earliest.hfclk = NRF_RADIO_HFCLK_CFG_DEFAULT;
radio_request.params.earliest.length_us = 250;
radio_request.params.earliest.priority = NRF_RADIO_PRIORITY_HIGH;
radio_request.params.earliest.timeout_us = 100000;
sd_radio_request(&radio_request);
#else
NVIC_SetPendingIRQ(PWM_IRQn);
#endifvoid nrf_pwm_set_values(uint32_t pwm_channel_num, uint32_t *pwm_values)
{
for(int i = 0; i < pwm_channel_num; i++)
{
pwm_next_value[i] = pwm_values[i];
pwm_modified[i] = true;
}
#if(USE_WITH_SOFTDEVICE == 1)
nrf_radio_request_t radio_request;
radio_request.request_type = NRF_RADIO_REQ_TYPE_EARLIEST;
radio_request.params.earliest.hfclk = NRF_RADIO_HFCLK_CFG_DEFAULT;
radio_request.params.earliest.length_us = 250;
radio_request.params.earliest.priority = NRF_RADIO_PRIORITY_HIGH;
radio_request.params.earliest.timeout_us = 100000;
sd_radio_request(&radio_request);
#else
NVIC_SetPendingIRQ(PWM_IRQn);
#endif
}最后看看中断服务函数
void PWM_IRQHandler(void)
{
static uint32_t i, new_capture, old_capture;
PWM_TIMER->CC[2] = pwm_max_value = pwm_next_max_value;
if(pwm_num_channels > 2) PWM_TIMER2->CC[2] = pwm_max_value;
for(i = 0; i < pwm_num_channels; i++)
{
if(pwm_modified[i])
{
pwm_modified[i] = false;
if(pwm_next_value[i] == 0)
{
nrf_gpiote_unconfig(pwm_gpiote_channel[i]);
nrf_gpio_pin_write(pwm_io_ch[i], 0);
pwm_running[i] = 0;
}
else if (pwm_next_value[i] >= pwm_max_value)
{
nrf_gpiote_unconfig(pwm_gpiote_channel[i]);
nrf_gpio_pin_write(pwm_io_ch[i], 1);
pwm_running[i] = 0;
}
else
{
if(i < 2)
{
new_capture = pwm_next_value[i];
old_capture = PWM_TIMER->CC[i];
if(!pwm_running[i])
{
nrf_gpiote_task_config(pwm_gpiote_channel[i], pwm_io_ch[i], NRF_GPIOTE_POLARITY_TOGGLE, NRF_GPIOTE_INITIAL_VALUE_HIGH);
pwm_running[i] = 1;
PWM_TIMER->TASKS_CAPTURE[3] = 1;
if(PWM_TIMER->CC[3] > new_capture) NRF_GPIOTE->TASKS_OUT[pwm_gpiote_channel[i]] = 1;
PWM_TIMER->CC[i] = new_capture;
}
else
{
while(1)
{
PWM_TIMER->TASKS_CAPTURE[3] = 1;
if(safe_margins_present(PWM_TIMER_CURRENT, old_capture) && safe_margins_present(PWM_TIMER_CURRENT, new_capture)) break;
}
if((PWM_TIMER_CURRENT >= old_capture && PWM_TIMER_CURRENT < new_capture) || (PWM_TIMER_CURRENT < old_capture && PWM_TIMER_CURRENT >= new_capture))
{
NRF_GPIOTE->TASKS_OUT[pwm_gpiote_channel[i]] = 1;
}
PWM_TIMER->CC[i] = new_capture;
}
}
else
{
new_capture = pwm_next_value[i];
old_capture = PWM_TIMER2->CC[i-2];
if(!pwm_running[i])
{
nrf_gpiote_task_config(pwm_gpiote_channel[i], pwm_io_ch[i], NRF_GPIOTE_POLARITY_TOGGLE, NRF_GPIOTE_INITIAL_VALUE_HIGH);
pwm_running[i] = 1;
PWM_TIMER2->TASKS_CAPTURE[3] = 1;
if(PWM_TIMER2->CC[3] > new_capture) NRF_GPIOTE->TASKS_OUT[pwm_gpiote_channel[i]] = 1;
PWM_TIMER2->CC[i-2] = new_capture;
}
else
{
while(1)
{
PWM_TIMER2->TASKS_CAPTURE[3] = 1;
if(safe_margins_present(PWM_TIMER2_CURRENT, old_capture) && safe_margins_present(PWM_TIMER2_CURRENT, new_capture)) break;
}
if((PWM_TIMER2_CURRENT >= old_capture && PWM_TIMER2_CURRENT < new_capture) || (PWM_TIMER2_CURRENT < old_capture && PWM_TIMER2_CURRENT >= new_capture))
{
NRF_GPIOTE->TASKS_OUT[pwm_gpiote_channel[i]] = 1;
}
PWM_TIMER2->CC[i-2] = new_capture;
}
}
}
}
}