dyld
dyld(the dynamic link editor)是苹果的动态链接器,是苹果操作系统一个重要组成部分,在系统内核做好程序准备工作之后,交由dyld负责余下的工作。
dyld加载过程分析
我们都知道程序的入口是main()函数,因此我们在程序的main()函数中打断点:

结果发现只有一个start函数,通过lldb指令(bt,up)查看,也只能知道与libdyld.dylib有关,但具体的啥也没有。
于是我们尝试在类的load()方法中打断点:
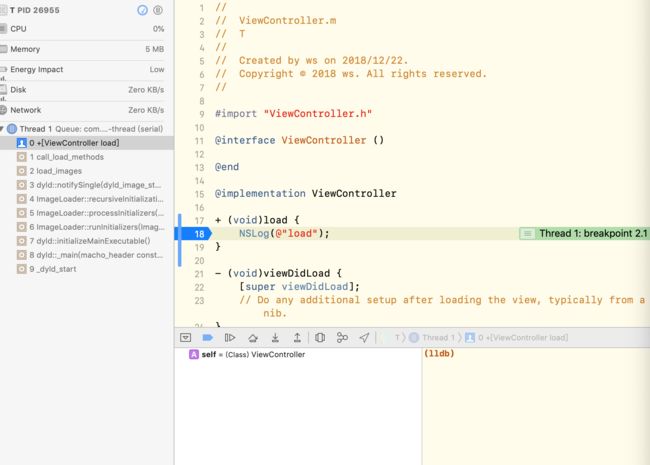
看到有一系列函数调用栈,点击第一个函数_dyld_start:
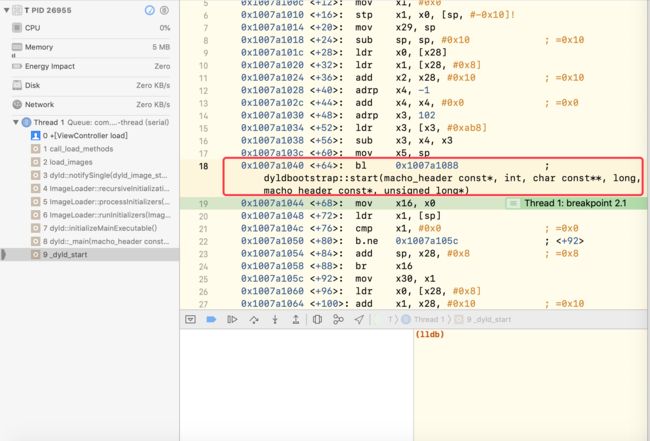
查看汇编,发现是由dyldbootstrap::start(macho_header const , int, char const , long, macho_header const, unsigned long*)方法开始的。我们从该方法进行dyld的源码分析。
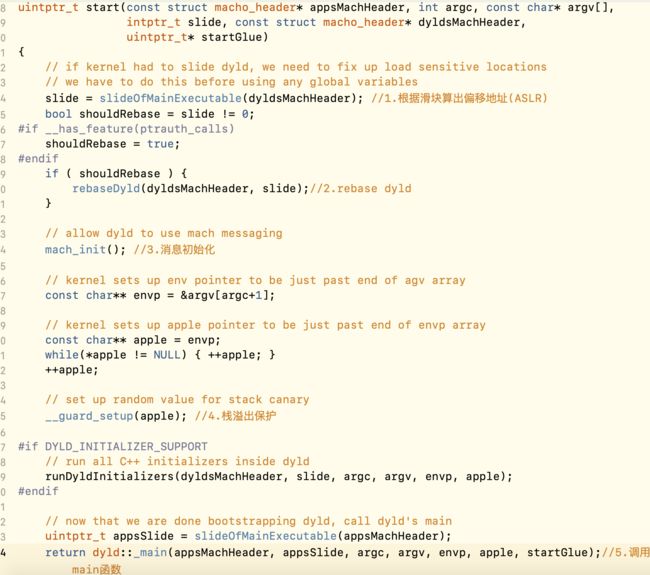
从源码中看到,dyldbootstrap::start主要做了根据滑块算出偏移地址(ASLR),rebase dyld,消息初始化,栈溢出保护, 最后调用了_main函数,整个app启动的关键函数就是这个_main()函数。
if (dyld3::kdebug_trace_dyld_enabled(DBG_DYLD_TIMING_LAUNCH_EXECUTABLE)) {
launchTraceID = dyld3::kdebug_trace_dyld_duration_start(DBG_DYLD_TIMING_LAUNCH_EXECUTABLE, (uint64_t)mainExecutableMH, 0, 0);
}
// Grab the cdHash of the main executable from the environment
//1.配置相关环境操作
uint8_t mainExecutableCDHashBuffer[20];
const uint8_t* mainExecutableCDHash = nullptr;//主程序的哈希
if ( hexToBytes(_simple_getenv(apple, "executable_cdhash"), 40, mainExecutableCDHashBuffer) )
mainExecutableCDHash = mainExecutableCDHashBuffer;
// Trace dyld's load
notifyKernelAboutImage((macho_header*)&__dso_handle, _simple_getenv(apple, "dyld_file"));
#if !TARGET_IPHONE_SIMULATOR
// Trace the main executable's load
notifyKernelAboutImage(mainExecutableMH, _simple_getenv(apple, "executable_file"));
#endif
uintptr_t result = 0;
sMainExecutableMachHeader = mainExecutableMH;//主程序MarchO的头
sMainExecutableSlide = mainExecutableSlide;//拿到主程序的slider,用于做重定向
#if __MAC_OS_X_VERSION_MIN_REQUIRED
// if this is host dyld, check to see if iOS simulator is being run
const char* rootPath = _simple_getenv(envp, "DYLD_ROOT_PATH");
if ( (rootPath != NULL) ) {
// look to see if simulator has its own dyld
char simDyldPath[PATH_MAX];
strlcpy(simDyldPath, rootPath, PATH_MAX);
strlcat(simDyldPath, "/usr/lib/dyld_sim", PATH_MAX);
int fd = my_open(simDyldPath, O_RDONLY, 0);
if ( fd != -1 ) {
const char* errMessage = useSimulatorDyld(fd, mainExecutableMH, simDyldPath, argc, argv, envp, apple, startGlue, &result);
if ( errMessage != NULL )
halt(errMessage);
return result;
}
}
#endif
CRSetCrashLogMessage("dyld: launch started");
setContext(mainExecutableMH, argc, argv, envp, apple);//设置上下文(函数的参数,标识信息)
// Pickup the pointer to the exec path.
sExecPath = _simple_getenv(apple, "executable_path");
// Remove interim apple[0] transition code from dyld
if (!sExecPath) sExecPath = apple[0];
if ( sExecPath[0] != '/' ) {
// have relative path, use cwd to make absolute
char cwdbuff[MAXPATHLEN];
if ( getcwd(cwdbuff, MAXPATHLEN) != NULL ) {
// maybe use static buffer to avoid calling malloc so early...
char* s = new char[strlen(cwdbuff) + strlen(sExecPath) + 2];
strcpy(s, cwdbuff);
strcat(s, "/");
strcat(s, sExecPath);
sExecPath = s;
}
}
// Remember short name of process for later logging
sExecShortName = ::strrchr(sExecPath, '/');
if ( sExecShortName != NULL )
++sExecShortName;
else
sExecShortName = sExecPath;
configureProcessRestrictions(mainExecutableMH);//配置进程相关信息,进程是否受限
#if __MAC_OS_X_VERSION_MIN_REQUIRED
if ( !gLinkContext.allowEnvVarsPrint && !gLinkContext.allowEnvVarsPath && !gLinkContext.allowEnvVarsSharedCache ) {
pruneEnvironmentVariables(envp, &apple);
// set again because envp and apple may have changed or moved
setContext(mainExecutableMH, argc, argv, envp, apple);
}
else
#endif
{
checkEnvironmentVariables(envp); //检测环境变量
defaultUninitializedFallbackPaths(envp);
}
#if __MAC_OS_X_VERSION_MIN_REQUIRED
if ( ((dyld3::MachOFile*)mainExecutableMH)->supportsPlatform(dyld3::Platform::iOSMac)
&& !((dyld3::MachOFile*)mainExecutableMH)->supportsPlatform(dyld3::Platform::macOS)) {
gLinkContext.rootPaths = parseColonList("/System/iOSSupport", NULL);
gLinkContext.marzipan = true;
if ( sEnv.DYLD_FALLBACK_LIBRARY_PATH == sLibraryFallbackPaths )
sEnv.DYLD_FALLBACK_LIBRARY_PATH = sRestrictedLibraryFallbackPaths;
if ( sEnv.DYLD_FALLBACK_FRAMEWORK_PATH == sFrameworkFallbackPaths )
sEnv.DYLD_FALLBACK_FRAMEWORK_PATH = sRestrictedFrameworkFallbackPaths;
}
#endif
if ( sEnv.DYLD_PRINT_OPTS )
printOptions(argv);
if ( sEnv.DYLD_PRINT_ENV )
printEnvironmentVariables(envp);
getHostInfo(mainExecutableMH, mainExecutableSlide);//获取相关程序架构,到这里整个环境配置完成。
源码中分析得,_main函数开始主要是配置相关环境, 包括对主程序哈希,保存主程序MarchO的头,保存主slider(用于做重定向),设置上下文,配置进程相关信息(进程是否受限),检测环境变量,获取相关程序架构。
这里补充一下:
if ( sEnv.DYLD_PRINT_OPTS )
printOptions(argv);
if ( sEnv.DYLD_PRINT_ENV )
printEnvironmentVariables(envp);
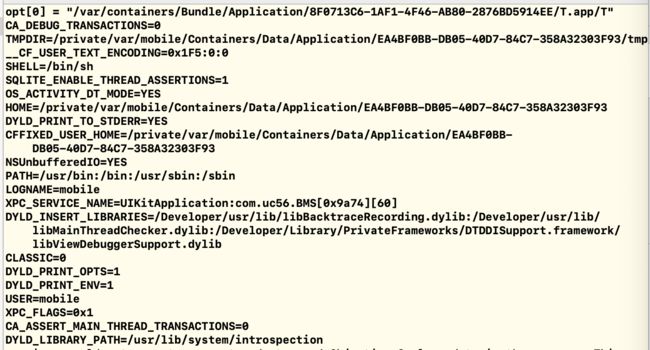
DYLD_PRINT_OPTS以及DYLD_PRINT_ENV编译的环境变量是可以在Xcode中配置的。
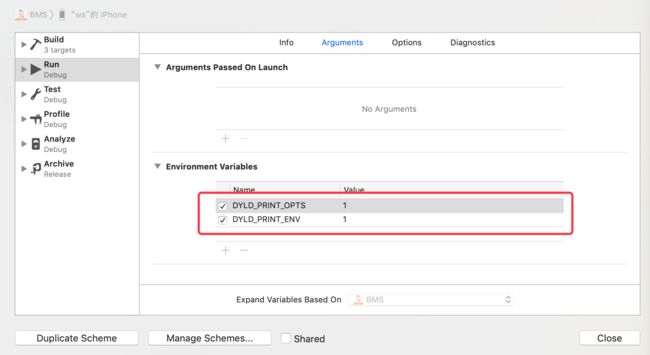
配置后,在程序的启动过程中会输出启动的相关信息:
_main函数中配置完环境变量后,接下来开始加载共享缓存库。
// load shared cache
checkSharedRegionDisable((dyld3::MachOLoaded*)mainExecutableMH, mainExecutableSlide);
调用函数检查共享缓存是否被禁用,进入checkSharedRegionDisable函数,
static void checkSharedRegionDisable(const dyld3::MachOLoaded* mainExecutableMH, uintptr_t mainExecutableSlide)
{
#if __MAC_OS_X_VERSION_MIN_REQUIRED
// if main executable has segments that overlap the shared region,
// then disable using the shared region
if ( mainExecutableMH->intersectsRange(SHARED_REGION_BASE, SHARED_REGION_SIZE) ) {
gLinkContext.sharedRegionMode = ImageLoader::kDontUseSharedRegion;
if ( gLinkContext.verboseMapping )
dyld::warn("disabling shared region because main executable overlaps\n");
}
#if __i386__
if ( !gLinkContext.allowEnvVarsPath ) {
// use private or no shared region for suid processes
gLinkContext.sharedRegionMode = ImageLoader::kUsePrivateSharedRegion;
}
#endif
#endif
// iOS cannot run without shared region
}
iOS必须开启共享缓存库才能运行。
检查共享缓存库开启后,开始调用mapSharedCache()函数加载共享缓存库,mapSharedCache()函数中又调用loadDyldCache()函数,
bool loadDyldCache(const SharedCacheOptions& options, SharedCacheLoadInfo* results)
{
results->loadAddress = 0;
results->slide = 0;
results->errorMessage = nullptr;
#if TARGET_IPHONE_SIMULATOR
// simulator only supports mmap()ing cache privately into process
return mapCachePrivate(options, results);
#else
if ( options.forcePrivate ) {
// mmap cache into this process only
return mapCachePrivate(options, results);
}
else {
// fast path: when cache is already mapped into shared region
bool hasError = false;
if ( reuseExistingCache(options, results) ) {
hasError = (results->errorMessage != nullptr);
} else {
// slow path: this is first process to load cache
hasError = mapCacheSystemWide(options, results);
}
return hasError;
}
#endif
}
loadDyldCache()函数中,有三种情况,第一种仅加载到当前进程,第二种是已经加载过了,不需要做任何处理,第三种是第一次加载,调用mapCacheSystemWide加载。
加载完共享缓存库之后,接下来开始加载主程序mach-O。
sMainExecutable = instantiateFromLoadedImage(mainExecutableMH, mainExecutableSlide, sExecPath);
_main函数中调用instantiateFromLoadedImage函数加载Match-O,进入instantiateFromLoadedImage函数,
static ImageLoaderMachO* instantiateFromLoadedImage(const macho_header* mh, uintptr_t slide, const char* path)
{
// try mach-o loader
if ( isCompatibleMachO((const uint8_t*)mh, path) ) {
ImageLoader* image = ImageLoaderMachO::instantiateMainExecutable(mh, slide, path, gLinkContext);
addImage(image);
return (ImageLoaderMachO*)image;
}
throw "main executable not a known format";
}
在instantiateFromLoadedImage调用isCompatibleMachO函数检测march-o的hader,然后调用ImageLoaderMachO::instantiateMainExecutable函数,进入ImageLoaderMachO::instantiateMainExecutable
// create image for main executable
ImageLoader* ImageLoaderMachO::instantiateMainExecutable(const macho_header* mh, uintptr_t slide, const char* path, const LinkContext& context)
{
//dyld::log("ImageLoader=%ld, ImageLoaderMachO=%ld, ImageLoaderMachOClassic=%ld, ImageLoaderMachOCompressed=%ld\n",
// sizeof(ImageLoader), sizeof(ImageLoaderMachO), sizeof(ImageLoaderMachOClassic), sizeof(ImageLoaderMachOCompressed));
bool compressed;
unsigned int segCount;
unsigned int libCount;
const linkedit_data_command* codeSigCmd;
const encryption_info_command* encryptCmd;
sniffLoadCommands(mh, path, false, &compressed, &segCount, &libCount, context, &codeSigCmd, &encryptCmd);
// instantiate concrete class based on content of load commands
if ( compressed )
return ImageLoaderMachOCompressed::instantiateMainExecutable(mh, slide, path, segCount, libCount, context);
else
#if SUPPORT_CLASSIC_MACHO
return ImageLoaderMachOClassic::instantiateMainExecutable(mh, slide, path, segCount, libCount, context);
#else
throw "missing LC_DYLD_INFO load command";
#endif
}
ImageLoaderMachO::instantiateMainExecutable函数中调用sniffLoadCommands为compressed(取值match-O中 dyld_info_only后者dyld_info),
segCount(match-O段的数量,最大不能大于255个),
libCount(match-O依赖库的个数,最大不能大于4095个),
codeSigCmd(代码签名),
encryptCmd(签名信息)
初始化。
ImageLoader是一个抽象类,ImageLoaderMachO::instantiateMainExecutable根据初始化后的值compressed分别调用不同的初始化方法进行初始化。
初始化完成后,返回到instantiateFromLoadedImage函数,调用addImage(image),将主程序添加sAllImages数组中。
static void addImage(ImageLoader* image)
{
// add to master list
allImagesLock();
sAllImages.push_back(image);
allImagesUnlock();
// update mapped ranges
uintptr_t lastSegStart = 0;
uintptr_t lastSegEnd = 0;
for(unsigned int i=0, e=image->segmentCount(); i < e; ++i) {
if ( image->segUnaccessible(i) )
continue;
uintptr_t start = image->segActualLoadAddress(i);
uintptr_t end = image->segActualEndAddress(i);
if ( start == lastSegEnd ) {
// two segments are contiguous, just record combined segments
lastSegEnd = end;
}
else {
// non-contiguous segments, record last (if any)
if ( lastSegEnd != 0 )
addMappedRange(image, lastSegStart, lastSegEnd);
lastSegStart = start;
lastSegEnd = end;
}
}
if ( lastSegEnd != 0 )
addMappedRange(image, lastSegStart, lastSegEnd);
if ( gLinkContext.verboseLoading || (sEnv.DYLD_PRINT_LIBRARIES_POST_LAUNCH && (sMainExecutable!=NULL) && sMainExecutable->isLinked()) ) {
dyld::log("dyld: loaded: %s\n", image->getPath());
}
}
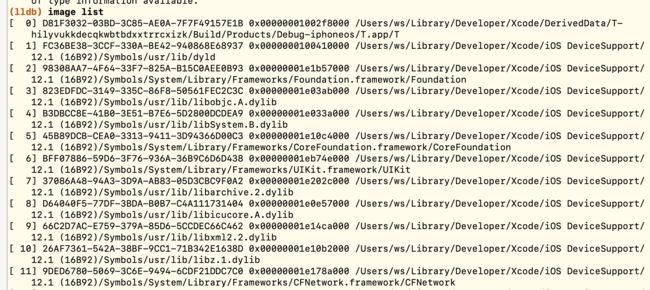
这里补充一下,我们经常在lldb调试中输入image list查看所有镜像模块,由于主程序是第一个添加到sAllImages中的,所以image list查看的模块第一个一定是主程序模块。
主程序加载完毕后,_main中调用根据DYLD_INSERT_LIBRARIES个数循环调用loadInsertedDylib函数,加载插入的动态库(越狱的插件就是修改sEnv.DYLD_INSERT_LIBRARIES值,利用这个步骤在APP中注入插件,这个是苹果预留给自己用的,必须是root的权限的用户才能使用,所以越狱也是获取了root权限):
// load any inserted libraries
if ( sEnv.DYLD_INSERT_LIBRARIES != NULL ) {
for (const char* const* lib = sEnv.DYLD_INSERT_LIBRARIES; *lib != NULL; ++lib)
loadInsertedDylib(*lib);
}
// record count of inserted libraries so that a flat search will look at
// inserted libraries, then main, then others.
sInsertedDylibCount = sAllImages.size()-1;
在loadInsertedDylib中调用load方法加载插入的动态库,并和主程序一样加入到sAllImages中。
动态库插入完成后,将插入的个数记录在sInsertedDylibCount中。
link(sMainExecutable, sEnv.DYLD_BIND_AT_LAUNCH, true, ImageLoader::RPathChain(NULL, NULL), -1);
然后开始调用link链接主程序,进入link函数中:
void ImageLoader::link(const LinkContext& context, bool forceLazysBound, bool preflightOnly, bool neverUnload, const RPathChain& loaderRPaths, const char* imagePath)
{
//dyld::log("ImageLoader::link(%s) refCount=%d, neverUnload=%d\n", imagePath, fDlopenReferenceCount, fNeverUnload);
// clear error strings
(*context.setErrorStrings)(0, NULL, NULL, NULL);
uint64_t t0 = mach_absolute_time();
this->recursiveLoadLibraries(context, preflightOnly, loaderRPaths, imagePath);
//在链接的时候,不仅仅是对主程序进行链接,还有很多依赖库也需要进行链接,所以首先循环加载依赖库
context.notifyBatch(dyld_image_state_dependents_mapped, preflightOnly);
// we only do the loading step for preflights
if ( preflightOnly )
return;
uint64_t t1 = mach_absolute_time();
context.clearAllDepths();
this->recursiveUpdateDepth(context.imageCount());//递归依赖层级
__block uint64_t t2, t3, t4, t5;
{
dyld3::ScopedTimer(DBG_DYLD_TIMING_APPLY_FIXUPS, 0, 0, 0);
t2 = mach_absolute_time();
this->recursiveRebase(context); //必须对主程序和依赖库做重定位rebase(由于ASLR的存在)
context.notifyBatch(dyld_image_state_rebased, false);
t3 = mach_absolute_time();
if ( !context.linkingMainExecutable ) //符号绑定
this->recursiveBindWithAccounting(context, forceLazysBound, neverUnload);
t4 = mach_absolute_time();
if ( !context.linkingMainExecutable )
this->weakBind(context); //弱绑定
t5 = mach_absolute_time();
}
if ( !context.linkingMainExecutable )
context.notifyBatch(dyld_image_state_bound, false);
uint64_t t6 = mach_absolute_time();
std::vector dofs;
this->recursiveGetDOFSections(context, dofs); //注册GOF
context.registerDOFs(dofs); //注册GOF
uint64_t t7 = mach_absolute_time();
// interpose any dynamically loaded images
if ( !context.linkingMainExecutable && (fgInterposingTuples.size() != 0) ) {
dyld3::ScopedTimer timer(DBG_DYLD_TIMING_APPLY_INTERPOSING, 0, 0, 0);
this->recursiveApplyInterposing(context);
}
// clear error strings
(*context.setErrorStrings)(0, NULL, NULL, NULL);
fgTotalLoadLibrariesTime += t1 - t0;
fgTotalRebaseTime += t3 - t2;
fgTotalBindTime += t4 - t3;
fgTotalWeakBindTime += t5 - t4;
fgTotalDOF += t7 - t6;
// done with initial dylib loads
fgNextPIEDylibAddress = 0;
}
link函数主要做了循环加载依赖库,对主程序和依赖库做重定位rebase,符号绑定,弱绑定,注册GOF。
if ( sInsertedDylibCount > 0 ) {
for(unsigned int i=0; i < sInsertedDylibCount; ++i) {
ImageLoader* image = sAllImages[i+1];
link(image, sEnv.DYLD_BIND_AT_LAUNCH, true, ImageLoader::RPathChain(NULL, NULL), -1);
image->setNeverUnloadRecursive();
}
// only INSERTED libraries can interpose
// register interposing info after all inserted libraries are bound so chaining works
for(unsigned int i=0; i < sInsertedDylibCount; ++i) {
ImageLoader* image = sAllImages[i+1];
image->registerInterposing(gLinkContext);
}
}
链接主程序完成后,判断sInsertedDylibCount插入的动态库数量是否大于0,然后循环调用link进行链接插入的动态库。
以上的所有步骤都是在加载Match-O,从initializeMainExecutable函数开始一步一步调用主程序代码。
// run all initializers
initializeMainExecutable();
结合之前的函数调用栈:
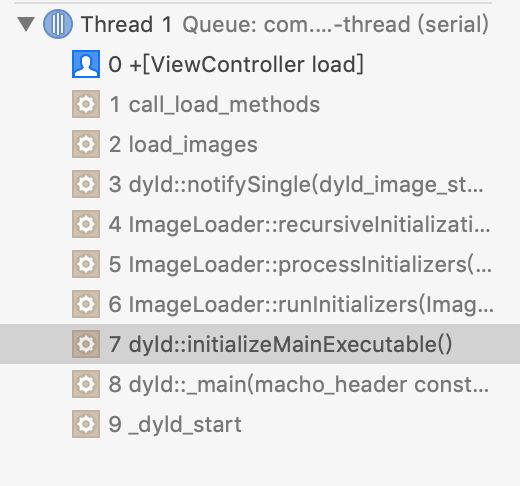
我们知道在initializeMainExecutable中调用了ImageLoader::runInitializers函数,ImageLoader::runInitializers函数调用了ImageLoader::processInitializers,而ImageLoader::processInitializers函数中调用了ImageLoader::recursiveInitialization:函数,ImageLoader::recursiveInitialization:中又调用dyld::notifySingle:这些都可以在源码中找到。
当我们在dyld::notifySingle:中找load_images时,却找不到。
static void notifySingle(dyld_image_states state, const ImageLoader* image, ImageLoader::InitializerTimingList* timingInfo)
{
//dyld::log("notifySingle(state=%d, image=%s)\n", state, image->getPath());
std::vector* handlers = stateToHandlers(state, sSingleHandlers);
if ( handlers != NULL ) {
dyld_image_info info;
info.imageLoadAddress = image->machHeader();
info.imageFilePath = image->getRealPath();
info.imageFileModDate = image->lastModified();
for (std::vector::iterator it = handlers->begin(); it != handlers->end(); ++it) {
const char* result = (*it)(state, 1, &info);
if ( (result != NULL) && (state == dyld_image_state_mapped) ) {
//fprintf(stderr, " image rejected by handler=%p\n", *it);
// make copy of thrown string so that later catch clauses can free it
const char* str = strdup(result);
throw str;
}
}
}
if ( state == dyld_image_state_mapped ) {
// Save load addr + UUID for images from outside the shared cache
if ( !image->inSharedCache() ) {
dyld_uuid_info info;
if ( image->getUUID(info.imageUUID) ) {
info.imageLoadAddress = image->machHeader();
addNonSharedCacheImageUUID(info);
}
}
}
if ( (state == dyld_image_state_dependents_initialized) && (sNotifyObjCInit != NULL) && image->notifyObjC() ) {
uint64_t t0 = mach_absolute_time();
dyld3::ScopedTimer timer(DBG_DYLD_TIMING_OBJC_INIT, (uint64_t)image->machHeader(), 0, 0);
(*sNotifyObjCInit)(image->getRealPath(), image->machHeader());
uint64_t t1 = mach_absolute_time();
uint64_t t2 = mach_absolute_time();
uint64_t timeInObjC = t1-t0;
uint64_t emptyTime = (t2-t1)*100;
if ( (timeInObjC > emptyTime) && (timingInfo != NULL) ) {
timingInfo->addTime(image->getShortName(), timeInObjC);
}
}
// mach message csdlc about dynamically unloaded images
if ( image->addFuncNotified() && (state == dyld_image_state_terminated) ) {
notifyKernel(*image, false);
const struct mach_header* loadAddress[] = { image->machHeader() };
const char* loadPath[] = { image->getPath() };
notifyMonitoringDyld(true, 1, loadAddress, loadPath);
}
}
仔细分析源码,发现了一个函数指针,(*sNotifyObjCInit)(image->getRealPath(), image->machHeader()); 我们猜测,有可能这个函数指针就是load_images函数。
为了验证结果,我们查找一下是哪个地方对sNotifyObjCInit这个函数指针赋值。
void registerObjCNotifiers(_dyld_objc_notify_mapped mapped, _dyld_objc_notify_init init, _dyld_objc_notify_unmapped unmapped)
{
// record functions to call
sNotifyObjCMapped = mapped;
sNotifyObjCInit = init;
sNotifyObjCUnmapped = unmapped;
// call 'mapped' function with all images mapped so far
try {
notifyBatchPartial(dyld_image_state_bound, true, NULL, false, true);
}
catch (const char* msg) {
// ignore request to abort during registration
}
// call 'init' function on all images already init'ed (below libSystem)
for (std::vector::iterator it=sAllImages.begin(); it != sAllImages.end(); it++) {
ImageLoader* image = *it;
if ( (image->getState() == dyld_image_state_initialized) && image->notifyObjC() ) {
dyld3::ScopedTimer timer(DBG_DYLD_TIMING_OBJC_INIT, (uint64_t)image->machHeader(), 0, 0);
(*sNotifyObjCInit)(image->getRealPath(), image->machHeader());
}
}
}
查找到是在registerObjCNotifiers函数为函数sNotifyObjCInit赋值的。
追本溯源,我们继续查找调用registerObjCNotifiers函数的源头,
void _dyld_objc_notify_register(_dyld_objc_notify_mapped mapped,
_dyld_objc_notify_init init,
_dyld_objc_notify_unmapped unmapped)
{
dyld::registerObjCNotifiers(mapped, init, unmapped);
}
发现是通过_dyld_objc_notify_register函数调用registerObjCNotifiers的,我们继续查找_dyld_objc_notify_register的调用者,但是在dyld源码中找不到。
这个时候,我们直接在Xcode中下一个_dyld_objc_notify_register函数的符号断点并运行:
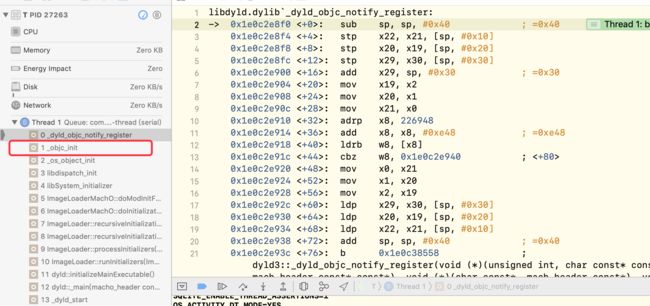
发现_dyld_objc_notify_register是由_objc_init函数调用的,这个时候我们只能查找objc源码了。
在objc源码中:
void _objc_init(void)
{
static bool initialized = false;
if (initialized) return;
initialized = true;
// fixme defer initialization until an objc-using image is found?
environ_init();
tls_init();
static_init();
lock_init();
exception_init();
_dyld_objc_notify_register(&map_images, load_images, unmap_image);
}
我们看到了_dyld_objc_notify_register被调用了,并且函数指针是load_images,所以我们的猜测是正确的。
进入load_images:
load_images(const char *path __unused, const struct mach_header *mh)
{
// Return without taking locks if there are no +load methods here.
if (!hasLoadMethods((const headerType *)mh)) return;
recursive_mutex_locker_t lock(loadMethodLock);
// Discover load methods
{
mutex_locker_t lock2(runtimeLock);
prepare_load_methods((const headerType *)mh);
}
// Call +load methods (without runtimeLock - re-entrant)
call_load_methods();
}
在load_images中调用了call_load_methods函数,继续进入call_load_methods函数,
**********************************************************************/
void call_load_methods(void)
{
static bool loading = NO;
bool more_categories;
loadMethodLock.assertLocked();
// Re-entrant calls do nothing; the outermost call will finish the job.
if (loading) return;
loading = YES;
void *pool = objc_autoreleasePoolPush();
do {
// 1. Repeatedly call class +loads until there aren't any more
while (loadable_classes_used > 0) {
call_class_loads();
}
// 2. Call category +loads ONCE
more_categories = call_category_loads();
// 3. Run more +loads if there are classes OR more untried categories
} while (loadable_classes_used > 0 || more_categories);
objc_autoreleasePoolPop(pool);
loading = NO;
}
终于在call_load_methods找到了循环调用我们程序中所有类的Load方法。
// let objc know we are about to initialize this image
uint64_t t1 = mach_absolute_time();
fState = dyld_image_state_dependents_initialized;
oldState = fState;
context.notifySingle(dyld_image_state_dependents_initialized, this, &timingInfo);
// initialize this image
bool hasInitializers = this->doInitialization(context);
ImageLoader::recursiveInitialization调用完dyld::notifySingle:后,会继续调用doInitialization函数,进入doInitialization函数
bool ImageLoaderMachO::doInitialization(const LinkContext& context)
{
CRSetCrashLogMessage2(this->getPath());
// mach-o has -init and static initializers
doImageInit(context);
doModInitFunctions(context);
CRSetCrashLogMessage2(NULL);
return (fHasDashInit || fHasInitializers);
}
doModInitFunctions作用是加载Match-O特有的函数(C++构造函数等)
下面我们来看一个实例:
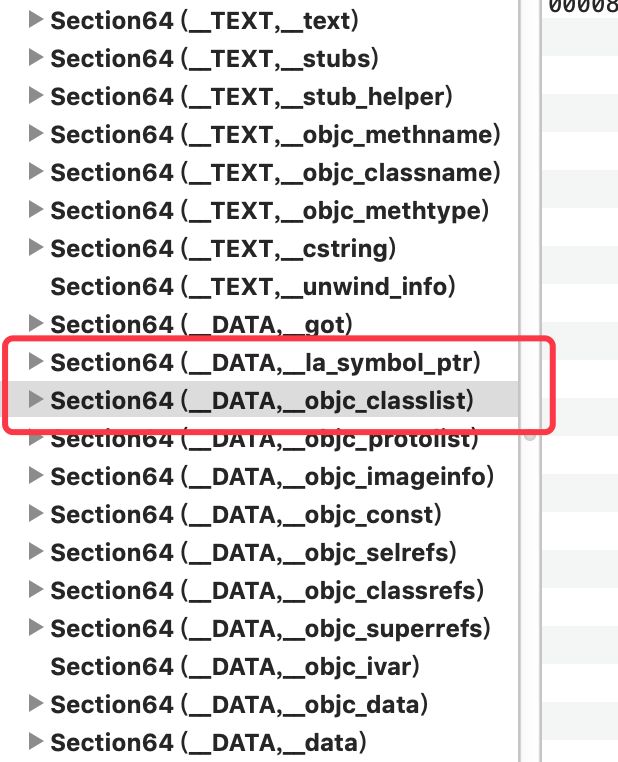
当我们建立一个空工程,没有写任何代码,编译后的mach-o如下:
当我们在main函数中加入如下代码:
#import
#import "AppDelegate.h"
__attribute__((constructor)) void func1(){
printf("func1来了");
}
__attribute__((constructor)) void func2(){
printf("func2来了");
}
int main(int argc, char * argv[]) {
@autoreleasepool {
return UIApplicationMain(argc, argv, nil, NSStringFromClass([AppDelegate class]));
}
}
编译后的mach-o如下:
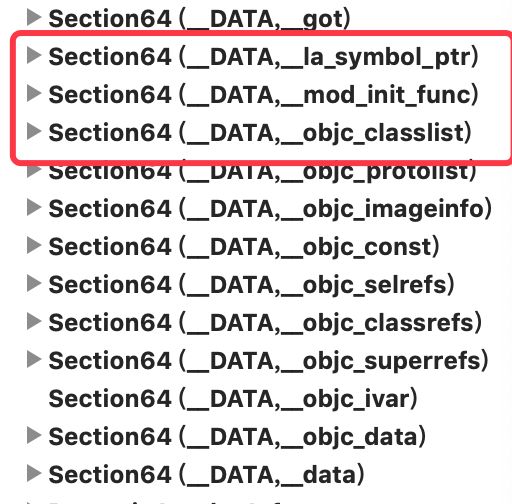
在MatchO文件DATA段_la_symbol_ptr和_objc_classlist多了_mod_init_func组。doModInitFunctions加载的就是_mod_init_func中数据。
initializeMainExecutable(); 执行完后,dyld开始找主程序的入口函数(MatchO中的LC_MAIN段)
// find entry point for main executable
result = (uintptr_t)sMainExecutable->getEntryFromLC_MAIN();
找到后,把结果返回到start中,由start进行调用。