基于FreeRTOS与MQTT的物联网技术应用系列——步进电机控制(五)MQTT的移植和步进电机控制的实现
本文在前一篇的基础上进行MQTT的移植,并实现对步进电机驱动器的控制。
分两步完成:
1、移植MQTT协议栈,并进行验证;
2、对步进电机进行控制。
一,移植MQTT协议
参考实现:https://github.com/baoshi/ESP-RTOS-Paho/tree/63c2c74dfe978f215b3bb05f7e1258454908c4fb
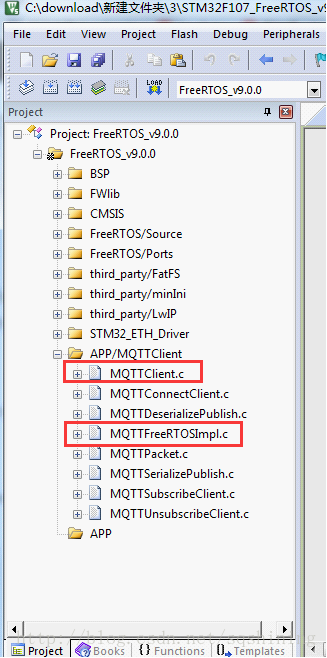
以前一篇文章完成的代码为基础,在工程目录下的APP文件夹中新建一个文件夹命名为MQTTClient,
把paho.mqtt.embedded-c源码包中的
paho.mqtt.embedded-c\MQTTPacket\src下的:
MQTTConnect.h
MQTTConnectClient.c
MQTTDeserializePublish.c
MQTTFormat.h
MQTTPacket.c
MQTTPacket.h
MQTTPublish.h
MQTTSerializePublish.c
MQTTSubscribe.h
MQTTSubscribeClient.c
MQTTUnsubscribe.h
MQTTUnsubscribeClient.c
StackTrace.h拷贝到MQTTClient文件夹中。
接下来,就是实现两个层面的连接处理:
1、tcp/ip建立连接,或由socket连接完成。
这部分放在
MQTTFreeRTOSImpl.c
MQTTFreeRTOSImpl.h2、MQTT连接。
这部分放在:
MQTTClient.c
MQTTClient.hMQTTFreeRTOSImpl.h的代码如下:
#ifndef MQTTFREERTOSIMPL_H
#define MQTTFREERTOSIMPL_H
#include "FreeRTOS.h"
#include "portmacro.h"
typedef struct Timer Timer;
struct Timer
{
portTickType end_time;
};
typedef struct Network Network;
struct Network
{
int my_socket;
int (*mqttread) (Network*, unsigned char*, int, int);
int (*mqttwrite) (Network*, unsigned char*, int, int);
};
char expired(Timer*);
void countdown_ms(Timer*, unsigned int);
void countdown(Timer*, unsigned int);
int left_ms(Timer*);
void InitTimer(Timer*);
int FreeRTOS_MQTT_read(Network*, unsigned char*, int, int);
int FreeRTOS_MQTT_write(Network*, unsigned char*, int, int);
void FreeRTOS_MQTT_disconnect(Network*);
void NewNetwork(Network* n);
int ConnectNetwork(Network* n, const char* host, int port);
int DisconnectNetwork(Network* n);
#endif /* MQTTFREERTOSIMPL_H */
MQTTFreeRTOSImpl.c的代码如下:
/*
²Î¿¼https://github.com/baoshi/ESP-RTOS-Paho/tree/63c2c74dfe978f215b3bb05f7e1258454908c4fb
*/
#include
#include "FreeRTOS.h"
#include "portmacro.h"
#include "lwip/sockets.h"
#include "lwip/inet.h"
#include "lwip/netdb.h"
#include "lwip/sys.h"
#include "MQTTFreeRTOSImpl.h"
#define _DEBUG
#include "dprintf.h"
char expired(Timer* timer)
{
portTickType now = xTaskGetTickCount();
int32_t left = timer->end_time - now;
return (left < 0);
}
void countdown_ms(Timer* timer, unsigned int timeout)
{
portTickType now = xTaskGetTickCount();
timer->end_time = now + timeout / portTICK_RATE_MS;
}
void countdown(Timer* timer, unsigned int timeout)
{
countdown_ms(timer, timeout);
}
int left_ms(Timer* timer)
{
portTickType now = xTaskGetTickCount();
int32_t left = timer->end_time - now;
return (left < 0) ? 0 : left / portTICK_RATE_MS;
}
void InitTimer(Timer* timer)
{
timer->end_time = 0;
}
#include "task.h"
#include "timers.h"
__asm void _nop(void)
{
nop
}
void delay(int i)
{
for(;i>0;i--)
_nop();
}
int FreeRTOS_MQTT_read(Network* n, unsigned char* buffer, int len, int timeout_ms)
{
TickType_t xTicksToWait = timeout_ms / portTICK_PERIOD_MS; /* convert milliseconds to ticks */
TimeOut_t xTimeOut;
int recvLen = 0;
vTaskSetTimeOutState(&xTimeOut); /* Record the time at which this function was entered. */
do
{
int rc = 0;
lwip_setsockopt(n->my_socket, SOL_SOCKET, SO_RCVTIMEO, &xTicksToWait, sizeof(TickType_t));
rc = recv(n->my_socket, buffer + recvLen, len - recvLen, 0);
//dprintf("rc=%d\n",rc);
delay(50);//must delay enough,otherwise,it will be blocked
if (rc >= 0)
recvLen += rc;
else if (rc <0)
{
recvLen = rc;
break;
}
} while (recvLen < len && xTaskCheckForTimeOut(&xTimeOut, &xTicksToWait) == pdFALSE);
return recvLen;
}
int FreeRTOS_MQTT_write(Network* n, unsigned char* buffer, int len, int timeout_ms)
{
TickType_t xTicksToWait = timeout_ms / portTICK_PERIOD_MS; /* convert milliseconds to ticks */
TimeOut_t xTimeOut;
int sentLen = 0;
vTaskSetTimeOutState(&xTimeOut); /* Record the time at which this function was entered. */
do
{
int rc = 0;
lwip_setsockopt(n->my_socket, SOL_SOCKET, SO_SNDTIMEO, &xTicksToWait, sizeof(xTicksToWait));
rc = send(n->my_socket, buffer + sentLen, len - sentLen, 0);
if (rc > 0)
sentLen += rc;
else if (rc < 0)
{
sentLen = rc;
break;
}
} while (sentLen < len && xTaskCheckForTimeOut(&xTimeOut, &xTicksToWait) == pdFALSE);
return sentLen;
}
void NewNetwork(Network* n)
{
n->my_socket = -1;
n->mqttread = FreeRTOS_MQTT_read;
n->mqttwrite = FreeRTOS_MQTT_write;
}
int host2addr(const char *hostname , struct in_addr *in)
{
struct addrinfo hints, *servinfo, *p;
struct sockaddr_in *h;
int rv;
memset(&hints, 0, sizeof(hints));
hints.ai_family = AF_INET;
hints.ai_socktype = SOCK_STREAM;
rv = getaddrinfo(hostname, 0 , &hints , &servinfo);
if (rv != 0)
{
return rv;
}
// loop through all the results and get the first resolve
for (p = servinfo; p != 0; p = p->ai_next)
{
h = (struct sockaddr_in *)p->ai_addr;
in->s_addr = h->sin_addr.s_addr;
}
freeaddrinfo(servinfo); // all done with this structure
return 0;
}
int ConnectNetwork(Network* n, const char* host, int port)
{
struct sockaddr_in addr;
int ret;
if (host2addr(host, &(addr.sin_addr)) != 0)
{
return -1;
}
addr.sin_family = AF_INET;
addr.sin_port = htons(port);
n->my_socket = socket(PF_INET, SOCK_STREAM, IPPROTO_TCP);
if( n->my_socket < 0 )
{
// error
return -1;
}
ret = connect(n->my_socket, ( struct sockaddr *)&addr, sizeof(struct sockaddr_in));
if( ret < 0 )
{
// error
lwip_close(n->my_socket);
return ret;
}
return ret;
}
int DisconnectNetwork(Network* n)
{
lwip_close(n->my_socket);
n->my_socket = -1;
return 0;
}
MQTTClient.h代码如下:
/*******************************************************************************
* Copyright (c) 2014 IBM Corp.
*
* All rights reserved. This program and the accompanying materials
* are made available under the terms of the Eclipse Public License v1.0
* and Eclipse Distribution License v1.0 which accompany this distribution.
*
* The Eclipse Public License is available at
* http://www.eclipse.org/legal/epl-v10.html
* and the Eclipse Distribution License is available at
* http://www.eclipse.org/org/documents/edl-v10.php.
*
* Contributors:
* Allan Stockdill-Mander/Ian Craggs - initial API and implementation and/or initial documentation
*******************************************************************************/
#ifndef __MQTT_CLIENT_C_
#define __MQTT_CLIENT_C_
#include "MQTTPacket.h"
#include "MQTTFreeRTOSImpl.h"
#define MAX_PACKET_ID 65535
#define MAX_MESSAGE_HANDLERS 5
#define MAX_FAIL_ALLOWED 2
enum QoS { QOS0, QOS1, QOS2 };
// all failure return codes must be negative
enum returnCode {DISCONNECTED = -3, BUFFER_OVERFLOW = -2, FAILURE = -1, SUCCESS = 0 };
void NewTimer(Timer*);
typedef struct _MQTTMessage
{
enum QoS qos;
char retained;
char dup;
unsigned short id;
void *payload;
size_t payloadlen;
} MQTTMessage;
typedef struct _MessageData
{
MQTTString* topic;
MQTTMessage* message;
} MessageData;
typedef void (*messageHandler)(MessageData*);
struct _MQTTClient
{
unsigned int next_packetid;
unsigned int command_timeout_ms;
size_t buf_size, readbuf_size;
unsigned char *buf;
unsigned char *readbuf;
unsigned int keepAliveInterval;
char ping_outstanding;
int fail_count;
int isconnected;
struct MessageHandlers
{
const char* topicFilter;
void (*fp) (MessageData*);
} messageHandlers[MAX_MESSAGE_HANDLERS]; // Message handlers are indexed by subscription topic
void (*defaultMessageHandler) (MessageData*);
Network* ipstack;
Timer ping_timer;
};
typedef struct _MQTTClient MQTTClient;
int MQTTConnect(MQTTClient* c, MQTTPacket_connectData* options);
int MQTTPublish(MQTTClient* c, const char* topic, MQTTMessage* message);
int MQTTSubscribe(MQTTClient* c, const char* topic, enum QoS qos, messageHandler handler);
int MQTTUnsubscribe(MQTTClient* c, const char* topic);
int MQTTDisconnect(MQTTClient* c);
int MQTTYield(MQTTClient* c, int timeout_ms);
void NewMQTTClient(MQTTClient*, Network*, unsigned int, unsigned char*, size_t, unsigned char*, size_t);
#define DefaultClient {0, 0, 0, 0, NULL, NULL, 0, 0, 0}
#endif
MQTTClient.c的代码如下:
/*******************************************************************************
* Copyright (c) 2014 IBM Corp.
*
* All rights reserved. This program and the accompanying materials
* are made available under the terms of the Eclipse Public License v1.0
* and Eclipse Distribution License v1.0 which accompany this distribution.
*
* The Eclipse Public License is available at
* http://www.eclipse.org/legal/epl-v10.html
* and the Eclipse Distribution License is available at
* http://www.eclipse.org/org/documents/edl-v10.php.
*
* Contributors:
* Allan Stockdill-Mander/Ian Craggs - initial API and implementation and/or initial documentation
*******************************************************************************/
#include "MQTTClient.h"
//#define _DEBUG
#include "dprintf.h"
void NewMessageData(MessageData* md, MQTTString* aTopicName, MQTTMessage* aMessgage) {
md->topic = aTopicName;
md->message = aMessgage;
}
int getNextPacketId(MQTTClient *c) {
return c->next_packetid = (c->next_packetid == MAX_PACKET_ID) ? 1 : c->next_packetid + 1;
}
int sendPacket(MQTTClient* c, int length, Timer* timer)
{
int rc = FAILURE,
sent = 0;
while (sent < length && !expired(timer))
{
rc = c->ipstack->mqttwrite(c->ipstack, &c->buf[sent], length, left_ms(timer));
if (rc < 0) // there was an error writing the data
break;
sent += rc;
}
if (sent == length)
{
countdown(&(c->ping_timer), c->keepAliveInterval); // record the fact that we have successfully sent the packet
rc = SUCCESS;
}
else
rc = FAILURE;
return rc;
}
int decodePacket(MQTTClient* c, int* value, int timeout)
{
unsigned char i;
int multiplier = 1;
int len = 0;
const int MAX_NO_OF_REMAINING_LENGTH_BYTES = 4;
*value = 0;
do
{
int rc = MQTTPACKET_READ_ERROR;
if (++len > MAX_NO_OF_REMAINING_LENGTH_BYTES)
{
rc = MQTTPACKET_READ_ERROR; /* bad data */
goto exit;
}
rc = c->ipstack->mqttread(c->ipstack, &i, 1, timeout);
if (rc != 1)
goto exit;
*value += (i & 127) * multiplier;
multiplier *= 128;
} while ((i & 128) != 0);
exit:
return len;
}
int readPacket(MQTTClient* c, Timer* timer)
{
int rc = FAILURE;
MQTTHeader header = {0};
int len = 0;
int rem_len = 0;
int data_real_len=0;
/* 1. read the header byte. This has the packet type in it */
if (c->ipstack->mqttread(c->ipstack, c->readbuf, 1, left_ms(timer)) != 1)
goto exit;
len = 1;
/* 2. read the remaining length. This is variable in itself */
decodePacket(c, &rem_len, left_ms(timer));
len += MQTTPacket_encode(c->readbuf + 1, rem_len); /* put the original remaining length back into the buffer */
/* 3. read the rest of the buffer using a callback to supply the rest of the data */
if (rem_len > 0 && ((data_real_len=c->ipstack->mqttread(c->ipstack, c->readbuf + len, rem_len, left_ms(timer))) != rem_len))
{
goto exit;
}
#if 0 /* Commented @ 2017-Apr-25 1:34:59 */
else
{
int i;
dprintf("data len=%d ,,,, data_real_len=%d\n",rem_len,data_real_len);
dprintf("c->readbuf=%p\n",c->readbuf);
for(i=0;iprintf("%02X ,",c->readbuf[i]);
if(i%10==9)
printf("\n");
}
}
#endif /* Commented */
header.byte = c->readbuf[0];
rc = header.bits.type;
exit:
dprintf("readPacket=%d\n", rc);
return rc;
}
// assume topic filter and name is in correct format
// # can only be at end
// + and # can only be next to separator
char isTopicMatched(char* topicFilter, MQTTString* topicName)
{
char* curf = topicFilter;
char* curn = topicName->lenstring.data;
char* curn_end = curn + topicName->lenstring.len;
while (*curf && curn < curn_end)
{
if (*curn == '/' && *curf != '/')
break;
if (*curf != '+' && *curf != '#' && *curf != *curn)
break;
if (*curf == '+')
{ // skip until we meet the next separator, or end of string
char* nextpos = curn + 1;
while (nextpos < curn_end && *nextpos != '/')
nextpos = ++curn + 1;
}
else if (*curf == '#')
curn = curn_end - 1; // skip until end of string
curf++;
curn++;
};
return (curn == curn_end) && (*curf == '\0');
}
int deliverMessage(MQTTClient* c, MQTTString* topicName, MQTTMessage* message)
{
int i;
int rc = FAILURE;
// we have to find the right message handler - indexed by topic
for (i = 0; i < MAX_MESSAGE_HANDLERS; ++i)
{
if (c->messageHandlers[i].topicFilter != 0 && (MQTTPacket_equals(topicName, (char*)c->messageHandlers[i].topicFilter) ||
isTopicMatched((char*)c->messageHandlers[i].topicFilter, topicName)))
{
if (c->messageHandlers[i].fp != NULL)
{
MessageData md;
NewMessageData(&md, topicName, message);
c->messageHandlers[i].fp(&md);
rc = SUCCESS;
}
}
}
if (rc == FAILURE && c->defaultMessageHandler != NULL)
{
MessageData md;
NewMessageData(&md, topicName, message);
c->defaultMessageHandler(&md);
rc = SUCCESS;
}
return rc;
}
int keepalive(MQTTClient* c)
{
int rc = SUCCESS;
if (c->keepAliveInterval == 0)
{
rc = SUCCESS;
goto exit;
}
if (expired(&(c->ping_timer)))
{
if (c->ping_outstanding)
{
// if ping failure accumulated above MAX_FAIL_ALLOWED, the connection is broken
++(c->fail_count);
if (c->fail_count >= MAX_FAIL_ALLOWED)
{
rc = DISCONNECTED;
goto exit;
}
}
else
{
Timer timer;
int len;
InitTimer(&timer);
countdown_ms(&timer, 1000);
c->ping_outstanding = 1;
len = MQTTSerialize_pingreq(c->buf, c->buf_size);
if (len > 0){dprintf("send ping\n");
sendPacket(c, len, &timer);}
}
// re-arm ping counter
countdown(&(c->ping_timer), c->keepAliveInterval);
}
exit:
return rc;
}
int cycle(MQTTClient* c, Timer* timer)
{
// read the socket, see what work is due
int packet_type = readPacket(c, timer);
int len = 0,
rc = SUCCESS;
dprintf("packet_type=%d\n",packet_type);
switch (packet_type)
{
case CONNACK:
case PUBACK:
case SUBACK:
break;
case PUBLISH:
{
MQTTString topicName;
MQTTMessage msg;
if (MQTTDeserialize_publish((unsigned char*)&msg.dup, (int*)&msg.qos, (unsigned char*)&msg.retained, (unsigned short*)&msg.id, &topicName,
(unsigned char**)&msg.payload, (int*)&msg.payloadlen, c->readbuf, c->readbuf_size) != 1)
goto exit;
deliverMessage(c, &topicName, &msg);
if (msg.qos != QOS0)
{
if (msg.qos == QOS1)
len = MQTTSerialize_ack(c->buf, c->buf_size, PUBACK, 0, msg.id);
else if (msg.qos == QOS2)
len = MQTTSerialize_ack(c->buf, c->buf_size, PUBREC, 0, msg.id);
if (len <= 0)
rc = FAILURE;
else
rc = sendPacket(c, len, timer);
if (rc == FAILURE)
goto exit; // there was a problem
}
break;
}
case PUBREC:
{
unsigned short mypacketid;
unsigned char dup, type;
if (MQTTDeserialize_ack(&type, &dup, &mypacketid, c->readbuf, c->readbuf_size) != 1)
rc = FAILURE;
else if ((len = MQTTSerialize_ack(c->buf, c->buf_size, PUBREL, 0, mypacketid)) <= 0)
rc = FAILURE;
else if ((rc = sendPacket(c, len, timer)) != SUCCESS) // send the PUBREL packet
rc = FAILURE; // there was a problem
if (rc == FAILURE)
goto exit; // there was a problem
break;
}
case PUBCOMP:
break;
case PINGRESP:
{
c->ping_outstanding = 0;
c->fail_count = 0;
}
break;
}
if (c->isconnected)
rc = keepalive(c);
exit:
if (rc == SUCCESS)
rc = packet_type;
return rc;
}
void NewMQTTClient(MQTTClient* c, Network* network, unsigned int command_timeout_ms, unsigned char* buf, size_t buf_size, unsigned char* readbuf, size_t readbuf_size)
{
int i;
c->ipstack = network;
for (i = 0; i < MAX_MESSAGE_HANDLERS; ++i)
c->messageHandlers[i].topicFilter = 0;
c->command_timeout_ms = command_timeout_ms;
c->buf = buf;
c->buf_size = buf_size;
c->readbuf = readbuf;
c->readbuf_size = readbuf_size;
c->isconnected = 0;
c->ping_outstanding = 0;
c->fail_count = 0;
c->defaultMessageHandler = NULL;
InitTimer(&(c->ping_timer));
}
int MQTTYield(MQTTClient* c, int timeout_ms)
{
int rc = SUCCESS;
Timer timer;
InitTimer(&timer);
countdown_ms(&timer, timeout_ms);
while (!expired(&timer))
{
rc = cycle(c, &timer);
// cycle could return 0 or packet_type or 65535 if nothing is read
// cycle returns DISCONNECTED only if keepalive() fails.
if (rc == DISCONNECTED)
break;
rc = SUCCESS;
}
return rc;
}
// only used in single-threaded mode where one command at a time is in process
int waitfor(MQTTClient* c, int packet_type, Timer* timer)
{
int rc = FAILURE;
do
{
if (expired(timer))
break; // we timed out
}
while ((rc = cycle(c, timer)) != packet_type);
return rc;
}
int MQTTConnect(MQTTClient* c, MQTTPacket_connectData* options)
{
Timer connect_timer;
int rc = FAILURE;
MQTTPacket_connectData default_options = MQTTPacket_connectData_initializer;
int len = 0;
InitTimer(&connect_timer);
countdown_ms(&connect_timer, c->command_timeout_ms);
if (c->isconnected) // don't send connect packet again if we are already connected
goto exit;
if (options == 0)
options = &default_options; // set default options if none were supplied
c->keepAliveInterval = options->keepAliveInterval;
countdown(&(c->ping_timer), c->keepAliveInterval);
if ((len = MQTTSerialize_connect(c->buf, c->buf_size, options)) <= 0)
goto exit;
if ((rc = sendPacket(c, len, &connect_timer)) != SUCCESS) // send the connect packet
goto exit; // there was a problem
// this will be a blocking call, wait for the connack
if (waitfor(c, CONNACK, &connect_timer) == CONNACK)
{
unsigned char connack_rc = 255;
char sessionPresent = 0;
if (MQTTDeserialize_connack((unsigned char*)&sessionPresent, &connack_rc, c->readbuf, c->readbuf_size) == 1)
rc = connack_rc;
else
rc = FAILURE;
}
else
rc = FAILURE;
exit:
if (rc == SUCCESS)
c->isconnected = 1;
return rc;
}
int MQTTSubscribe(MQTTClient* c, const char* topic, enum QoS qos, messageHandler handler)
{
int rc = FAILURE;
Timer timer;
int len = 0;
MQTTString topicStr = MQTTString_initializer;
topicStr.cstring = (char *)topic;
InitTimer(&timer);
countdown_ms(&timer, c->command_timeout_ms);
if (!c->isconnected)
goto exit;
len = MQTTSerialize_subscribe(c->buf, c->buf_size, 0, getNextPacketId(c), 1, &topicStr, (int*)&qos);
if (len <= 0)
goto exit;
if ((rc = sendPacket(c, len, &timer)) != SUCCESS) // send the subscribe packet
{
goto exit; // there was a problem
}
if (waitfor(c, SUBACK, &timer) == SUBACK) // wait for suback
{
int count = 0, grantedQoS = -1;
unsigned short mypacketid;
if (MQTTDeserialize_suback(&mypacketid, 1, &count, &grantedQoS, c->readbuf, c->readbuf_size) == 1)
rc = grantedQoS; // 0, 1, 2 or 0x80
if (rc != 0x80)
{
int i;
for (i = 0; i < MAX_MESSAGE_HANDLERS; ++i)
{
if (c->messageHandlers[i].topicFilter == 0)
{
c->messageHandlers[i].topicFilter = topic;
c->messageHandlers[i].fp = handler;
rc = 0;
break;
}
}
}
}
else
rc = FAILURE;
exit:
return rc;
}
int MQTTUnsubscribe(MQTTClient* c, const char* topicFilter)
{
int rc = FAILURE;
int len = 0;
Timer timer;
MQTTString topic = MQTTString_initializer;
topic.cstring = (char *)topicFilter;
InitTimer(&timer);
countdown_ms(&timer, c->command_timeout_ms);
if (!c->isconnected)
goto exit;
if ((len = MQTTSerialize_unsubscribe(c->buf, c->buf_size, 0, getNextPacketId(c), 1, &topic)) <= 0)
goto exit;
if ((rc = sendPacket(c, len, &timer)) != SUCCESS) // send the subscribe packet
goto exit; // there was a problem
if (waitfor(c, UNSUBACK, &timer) == UNSUBACK)
{
unsigned short mypacketid; // should be the same as the packetid above
if (MQTTDeserialize_unsuback(&mypacketid, c->readbuf, c->readbuf_size) == 1)
rc = 0;
}
else
rc = FAILURE;
exit:
return rc;
}
int MQTTPublish(MQTTClient* c, const char* topic, MQTTMessage* message)
{
int rc = FAILURE;
int len = 0;
Timer timer;
MQTTString topicStr = MQTTString_initializer;
topicStr.cstring = (char *)topic;
InitTimer(&timer);
countdown_ms(&timer, c->command_timeout_ms);
if (!c->isconnected)
goto exit;
if (message->qos == QOS1 || message->qos == QOS2)
message->id = getNextPacketId(c);
len = MQTTSerialize_publish(c->buf, c->buf_size, 0, message->qos, message->retained, message->id,
topicStr, (unsigned char*)message->payload, message->payloadlen);
if (len <= 0)
goto exit;
if ((rc = sendPacket(c, len, &timer)) != SUCCESS) // send the subscribe packet
{
goto exit; // there was a problem
}
if (message->qos == QOS1)
{
if (waitfor(c, PUBACK, &timer) == PUBACK)
{
unsigned short mypacketid;
unsigned char dup, type;
// We still can receive from broker, treat as recoverable
c->fail_count = 0;
if (MQTTDeserialize_ack(&type, &dup, &mypacketid, c->readbuf, c->readbuf_size) != 1)
rc = FAILURE;
else
rc = SUCCESS;
}
else
{
rc = FAILURE;
}
}
else if (message->qos == QOS2)
{
if (waitfor(c, PUBCOMP, &timer) == PUBCOMP)
{
unsigned short mypacketid;
unsigned char dup, type;
// We still can receive from broker, treat as recoverable
c->fail_count = 0;
if (MQTTDeserialize_ack(&type, &dup, &mypacketid, c->readbuf, c->readbuf_size) != 1)
rc = FAILURE;
else
rc = SUCCESS;
}
else
{
rc = FAILURE;
}
}
exit:
return rc;
}
int MQTTDisconnect(MQTTClient* c)
{
int rc = FAILURE;
Timer timer; // we might wait for incomplete incoming publishes to complete
int len = MQTTSerialize_disconnect(c->buf, c->buf_size);
InitTimer(&timer);
countdown_ms(&timer, c->command_timeout_ms);
if (len > 0)
rc = sendPacket(c, len, &timer); // send the disconnect packet
c->isconnected = 0;
return rc;
}
把MQTTClient.c和MQTTFreeRTOSImpl.c加入到IDE中,并把..\APP\MQTTClient和..\APP加入到包含路径中。

编译一下通过。
然后写个测试程序:TestTask.c:
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
#include "MQTTClient.h"
#include 这部分代码如果没有用sd卡的话,可以把
#define USR_SD_CARD_INI注释掉,并把:
#define MQTT_HOST "10.0.0.108"修改为待连接的ip地址。
然后,把它存到APP目录下,并加入到IDE上。
然后修改一下BSP/netconf.c,在路由动态分配IP,打印消息以后,加入下面代码:
extern void testTask(void);
testTask();意思是,当动态IP分配完毕之后,立即创建一个任务,来执行我们的MQTT测试。
编译链接,把hex档烧到开发板上,然后上电运行。
对了,板子上电前别忘了把sd卡中的ip配置文件修改成本地电脑的ip:
[server]
ip=10.0.0.108
port=1883
name=
password=好了,下面验证一下:
在电脑上打开cmd,启动mosquitto
(参考:基于mini2440嵌入式linux上整合一套Domoticz智能家居系统(四)交叉编译OpenSSL、c-ares、e2fsprogs和mosquitto)
可以看到:
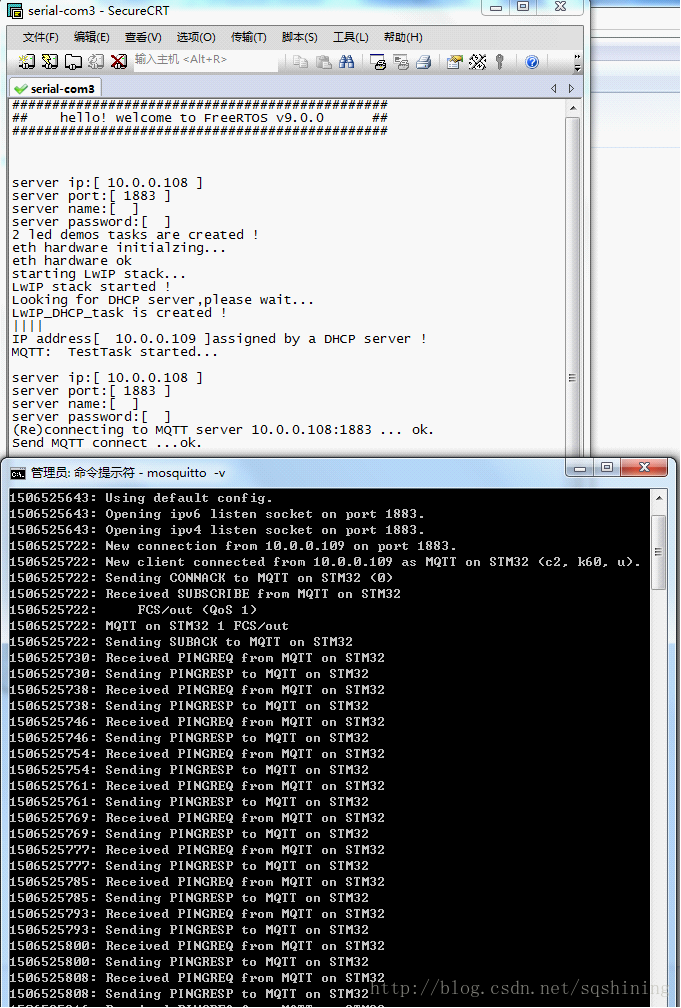
好了,MQTT已经跑起来了。
心跳包也正常。
然后,我们再开一个cmd窗口,用mosquito发一个话题为FCS/out的消息如下:
mosquitto_pub -h 127.0.0.1 -m "{idx:0,act:1}" -t "FCS/out"可以看到:
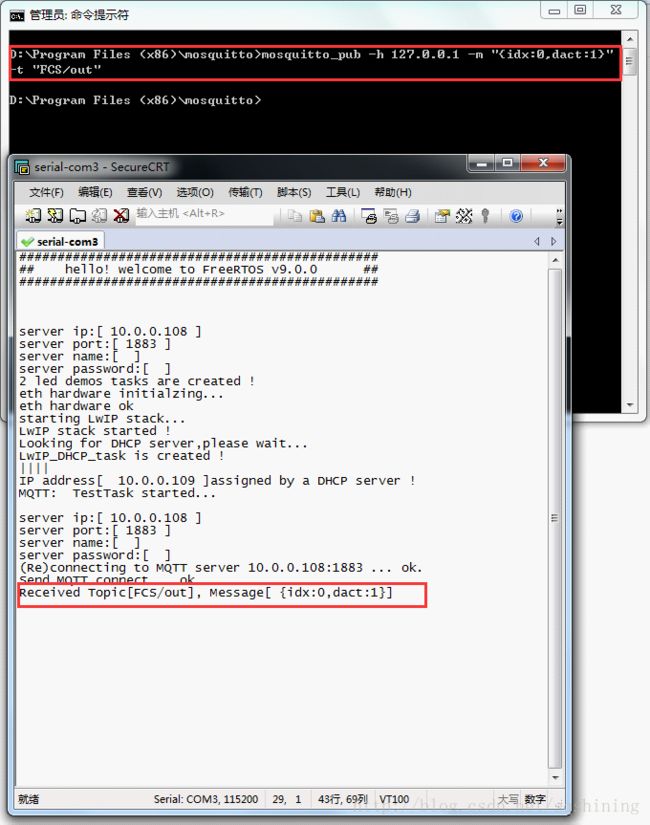
已经收到消息了。
说明MQTTClient程序工作正常。
接下来我们做一个mosquitto_pub另外的一种使用方法来测试一下。
因为后面我们将会发送带有换行符的消息,这样我们在应用程序中可以借用换行符来对消息进行解析。
而在测试中,不能使用mosquitto_pub命令行直接输入消息文本的方式来发送带有换行符的消息。幸好,mosquitto_pub有另一种方法,就是发送文件数据,有两种方式:
1、mosquitto_pub -t my/topic -f ./data
2、mosquitto_pub -t my/topic -s < ./data
参考:https://mosquitto.org/man/mosquitto_pub-1.html
我们选用了第二种方式。
为了测试,我们写一个批处理文件,来临时性的设置windows下的path环境变量,以便在本地目录中使用mosquito命令行程序:
@set path==%path%;%MOSQUITTO_DIR%"
@cmd.exe
把以上代码保存为:test.bat
然后双击运行:
然后我们创建两个文本文件:mytxt1.txt、mytxt2.txt
内容分别如下:
mytxt1.txt:
{
idx:0,
act:1
}mytxt2.txt
{
idx:0,
act:0
}把两个文本跟test.bat放在同目录下。
然后在刚才test.bat调出来的cmd界面上就可以使用下面两行命令进行测试了:
mosquitto_pub -t "FCS/out" -s < ./mytxt1.txt
mosquitto_pub -t "FCS/out" -s < ./mytxt2.txt可以看到:

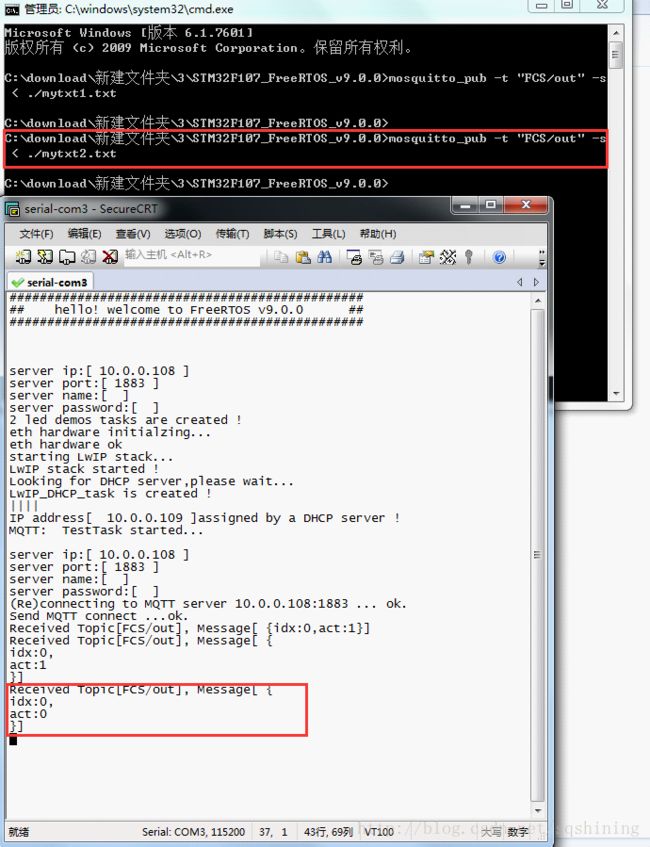
ok,测试完成。
以上完整代码下载地址:
STM32F107_FreeRTOS_v9.0.0_SDCard-FatFS_LwIP-1.4.1_MQTT.rar
二、对步进电机进行控制
本人使用的是16细分的步进电机驱动器,型号为 :ZD6560 v3c

使用共阴极的接法:
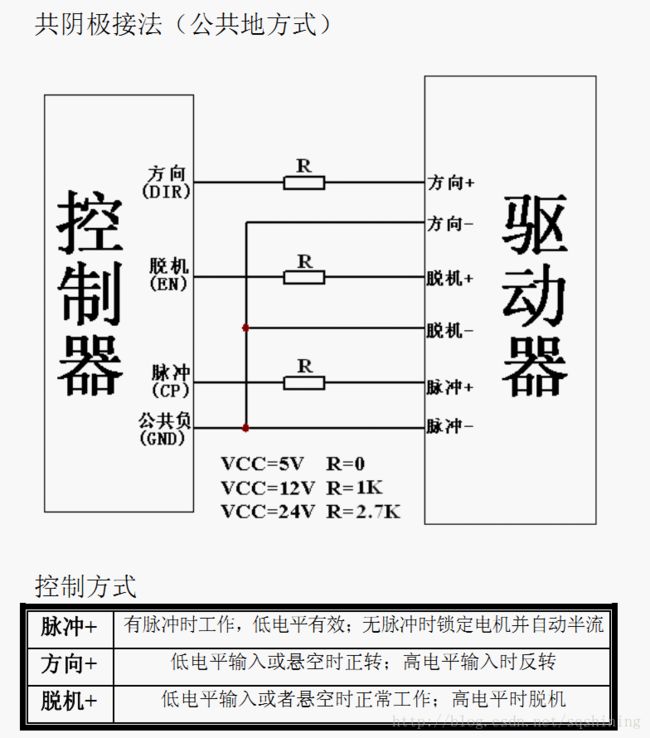
STM32芯片管脚跟电机驱动器的对应关系如下:
PC5(定义为Dir) ——–DIR
PC6(定义为Free) ——-EN
PC7(定义为Pulse)——-CP
脱机使能逻辑为:
0或悬空:正常工作(hold);
1:脱机。
所谓正常工作是指,无论有无脉冲,驱动器对电机线圈都一直供电,如果有脉冲,则按脉冲数据供电;
所谓脱机是指,无论有无脉冲,驱动器对电机线圈都不供电。
关于步进电机控制的设置说明:

我们使用的设置:

上图是侧面的拨码开关,向下是ON,向上是OFF。
| SW7 | SW6 | SW6 | SW4 | SW3 | SW2 | SW1 |
|---|---|---|---|---|---|---|
| OFF | ON | OFF | ON | OFF | OFF | ON |
按照说明书的设置规范,我们目前使用的是
16细分
电流1.2A
衰减:慢
本文的STM32芯片使用GPIO在硬件定时器的控制下输出方波的方式提供电机驱动器所需脉冲,之所以这样是因为本文需要对步进电机的步数进行统计和控制。因此,代码中使用了硬件定时器(TIM4)。进而需要在启动代码stm32f10x.s中开启TIM4的定时中断,并在stm32fx_it.c中添加定时器中断服务程序代码。还需要添加TIM4的配置初始化代码等。
对于MQTT消息的解析部分的程序框架可以参考:
基于mini2440嵌入式linux上整合一套Domoticz智能家居系统(九)使用domoticz+mosquitto+Android客户端实现控制mini2440上的LED(二)
由于代码比较多,就不一一贴上来了。
完整源代码下载地址:
STM32F107_FreeRTOS_v9.0.0_SDCard-FatFS_LwIP-1.4.1_MQTT_StepMotor.rar
稍微说明一下:
本代码中的步进电机控制只是验证性的控制,如用在实际控制环境中还需要进一步完善或修改。
还是发几张效果图吧:


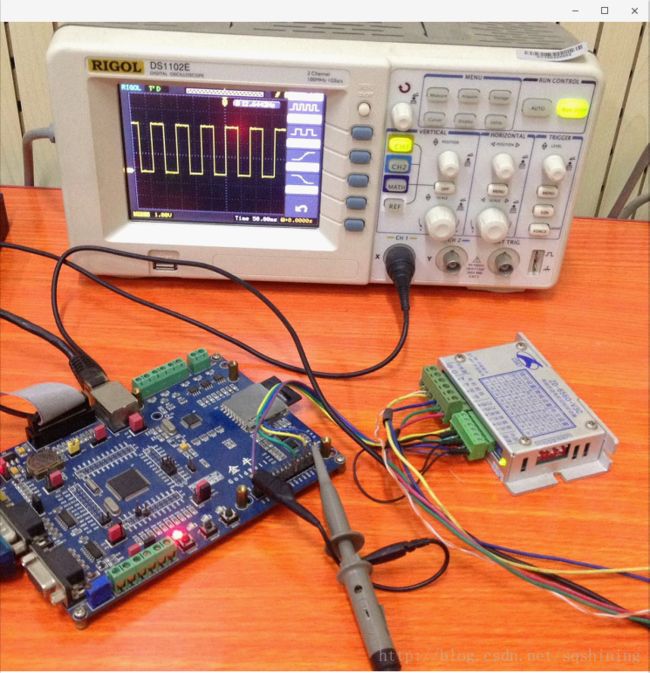
下一篇,将使用CrossApp框架是用mosquitto库开发PC端或移动端的对步进电机的控制应用程序。