OpenCV轮廓检测
最近再次用到了opencv轮廓,在这里结合作者冰山一角的博客(http://www.cnblogs.com/slysky/)以及自己的体会在此稍加说明。其程序主要参见冰山一角的Blog,遗憾的是代码是OpenCV1.0写的,等有时间再用2.4.2改写一篇。
对于轮廓的相关数据结构表示和几本操作(查找轮廓,画轮廓),可参见前面两片关于轮廓的例程,在这里不多讲。
对于查找轮廓我们一般要对图像Canny检测。但是对于很特殊的场合其实我们还可以直接对二值化的图像进行轮廓的提取,找出的轮廓其实就是Blob(这个可能就是为什么OpenCV高版本里面把blob分析抛弃的原因吧,我猜的话),画上外截矩形就是一个ROI,是不是觉得很有用?下面介绍轮廓的高级应用。
轮廓的特性
轮廓的特性有很多,下面一一介绍。
1.轮廓的多边形逼近
轮廓的多边形逼近指的是:使用多边形来近似表示一个轮廓。
多边形逼近的目的是为了减少轮廓的顶点数目。
多边形逼近的结果依然是一个轮廓,只是这个轮廓相对要粗旷一些。
可以使用方法cvApproxPoly()
2.轮廓的关键点
轮廓的关键点是:轮廓上包含曲线信息比较多的点。关键点是轮廓顶点的子集。
可以使用cvFindDominantPoints函数来获取轮廓上的关键点,该函数返回的结果一个包含 关键点在轮廓顶点中索引 的序列。再次强调:是索引,不是具体的点。如果要得到关键点的具体坐标,可以用索引到轮廓上去找。
3.轮廓的周长和面积
轮廓的周长可以用cvContourPerimeter或者cvArcLength函数来获取。
轮廓的面积可以用cvContourArea函数来获取。
4.轮廓的边界框
有三种常见的边界框:矩形、圆形、椭圆。
(1)矩形:在图像处理系统中提供了一种叫Rectangle的矩形,不过它只能表达边垂直或水平的特例;OpenCv中还有一种叫Box的矩形,它跟数学上的矩形一致,只要4个角是直角即可。
如果要获取轮廓的Rectangle,可以使用cvBoundingRect函数。
如果要获取轮廓的Box,可以使用cvMinAreaRect2函数。
(2)圆形
如果要获取轮廓的圆形边界框,可以使用cvMinEnclosingCircle函数。
(3)椭圆
如果要获取轮廓的椭圆边界框,可以使用cvFitEllipse2函数。
5.轮廓的矩
矩是通过对轮廓上所有点进行积分运算(或者认为是求和运算)而得到的一个粗略特征。
在连续情况下,图像函数为 f(x,y),那么图像的p+q阶几何矩(标准矩)定义为:
f(x,y),那么图像的p+q阶几何矩(标准矩)定义为:
 p ,q = 0,1,2……
p ,q = 0,1,2……
p+q阶中心距定义为:
 p,q = 0,1,2……
p,q = 0,1,2……
其中 和
和 代表图像的重心,
代表图像的重心,
 ,
,
对于离散的数字图像,采用求和号代替积分:
 ,
, ,p,q = 0,1,2 ……
,p,q = 0,1,2 ……
N和M分别是图像的高度和宽度;
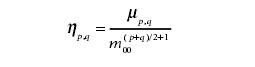
归一化的中心距定义为: ;其中
;其中
在公式中,p对应x维度上的矩,q对应y维度上的矩,阶数表示对应的部分的指数。该计算是对轮廓界上所有像素(数目为n)进行求和。如果p和q全部为0,那么m00实际上对应轮廓边界上点的数目。
虽然可以直接计算出轮廓的矩,但是经常会用到归一化的矩(因此不同大小但是形状相同的物体会有相同的值)。同样,简单的矩依赖于所选坐标系,这意味着物体旋转后就无法正确匹配。
于是就产生了Hu矩以及其他归一化矩的函数。
Hu矩是归一化中心矩的线性组合。之所以这样做是为了能够获取代表图像某个特征的矩函数。这些矩函数对缩放,旋转和镜像映射出了(h1)具有不变性。
Hu矩是从中心矩中计算得到。即七个由归一化中心矩组合成的矩:
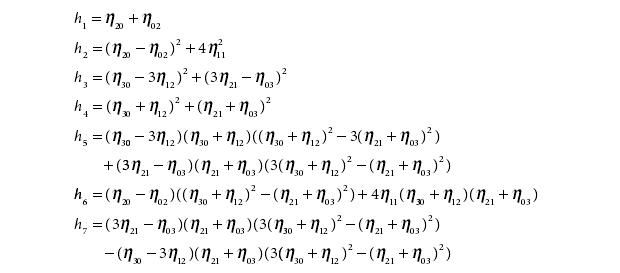
其中中心矩和归一化中心矩的定义为:

我们可以使用cvContoursMoments函数、cvMoments函数方便的得到轮廓的矩集,然后再相应的方法或函数获取各种矩。
特定的矩:cvGetSpatialMoment函数
中心矩:cvGetCentralMoment函数
归一化中心矩:cvGetNormalizedCentralMoment函数
Hu矩:cvGetHuMoments函数
6.轮廓的轮廓树
轮廓树用来描述某个特定轮廓的内部特征。注意:轮廓树跟轮廓是一一对应的关系;轮廓树不用于描述多个轮廓之间的层次关系。
轮廓树的创建过程:
从一个轮廓创建一个轮廓树是从底端(叶子节点)到顶端(根节点)的。首先搜索三角形突出或者凹陷的形状的周边(轮廓上的每一个点都不是完全和它的相邻点共线的)每个这样的三角形被一条线段代替,这条线段通过连接非相邻点的两点得到;因此实际上三角形或者被削平或者被填满。每个这样的替换都把轮廓的顶点减少,并且给轮廓树创建一个新节点。如果这样的一个三角形的两侧有原始边,那么她就是得到的轮廓树的叶子;如果一侧已是一个三角形,那么它就是那个三角形的父节点。这个过程的迭代最终把物体的外形简称一个四边形,这个四边形也被剖开;得到的两个三角形是根节点的两个子节点。
结果的二分树最终将原始轮廓的形状性比编码。每个节点被它所对应的三角形的信息所注释。
这样建立的轮廓树并不太鲁棒,因为轮廓上小的改变也可能会彻底改变结果的树,同时最初的三角形是任意选取的。为了得到较好的描述需要首先使用函数cvApproxPoly()之后将轮廓排列(运用循环移动)成最初的三角形不怎么收到旋转影响的状态。
可以用函数cvCreateContourTree来构造轮廓树。
7.轮廓的凸包和凸缺陷
轮廓的凸包和凸缺陷用于描述物体的外形。凸包和凸缺陷很容易获得,不过我目前不知道它们到底怎么使用。
如果要判断轮廓是否是凸的,可以用cvCheckContourConvexity函数。
如果要获取轮廓的凸包,可以用cvConvexHull2函数,返回的是包含顶点的序列。
如果要获取轮廓的凸缺陷,可以用cvConvexityDefects函数。
8.轮廓的成对几何直方图
成对几何直方图(pairwise geometrical histogram PGH)是链码编码直方图(chain code histogram CCH)的一个扩展或者延伸。CCH是一种直方图,用来统计一个轮廓的Freeman链码编码每一种走法的数字。这种直方图的一个优良性质为当物体旋转45度,那么新直方图是老直方图的循环平移。这样就可以不受旋转影响。
(1)轮廓保存的是一系列的顶点,轮廓是由一系列线段组成的多边形。对于看起来光滑的轮廓(例如圆),只是线段条数比较多,线段长度比较短而已。实际上,电脑中显示的任何曲线都由线段组成。
(2)每两条线段之间都有一定的关系,包括它们(或者它们的延长线)之间的夹角,两条线段的夹角范围是:(0,180)。
(3)每两条线段上的点之间还有距离关系,包括最短(小)距离、最远(大)距离,以及平均距离。最大距离我用了一个偷懒的计算方法,我把轮廓外界矩形的对角线长度看作了最大距离。
(4)成对几何直方图所用的统计数据包括了夹角和距离。
轮廓的匹配
如果要比较两个物体,可供选择的特征很多。如果要判断某个人的性别,可以根据他(她)头发的长短来判断,这很直观,在长发男稀有的年代准确率也很高。也可以根据这个人尿尿的射程来判断,如果射程大于0.50米,则是男性。总之,方法很多,不一而足。
我们在上文中得到了轮廓的这么多特征,它们也可以用于进行匹配。典型的轮廓匹配方法有:Hu矩匹配、轮廓树匹配、成对几何直方图匹配。
1.Hu矩匹配
轮廓的Hu矩对包括缩放、旋转和镜像映射在内的变化具有不变性。cvMatchShapes函数可以很方便的实现对2个轮廓间的匹配。
2.轮廓树匹配
用树的形式比较两个轮廓。cvMatchContourTrees函数实现了轮廓树的对比。
3.成对几何直方图匹配
在得到轮廓的成对几何直方图之后,可以使用直方图对比的方法来进行匹配。