搜索问题之状态空间搜索(状态压缩+记忆化搜索+ BFS)
文章目录
- 1. 前言
- 2. 问题举例(九宫格问题)
- 3. 问题分析
- 3.1 状态编码与解码
- 3.2 哈希映射
- 3.3 集合判重
- 4. 问题实现
- 推荐阅读
1. 前言
之前介绍的回溯法常用于 解空间的搜索 问题,即 找到一个或者所有满足约束条件的解,它通常是将解空间组织成树或者图,然后进行DFS(深度优先遍历)并注意在搜索的时候进行 剪枝操作。
但是状态空间搜索则是需要 找到一条从起始状态到终止状态的路径,其一般需要考虑一下问题:
- 状态的表示,即我们怎样表示一个状态。
- 状态的转移,即通过研究初始状态和目标状态的 差别 ,我们定义怎样的操作来进行状态的转移。
- 状态的压缩和记忆化搜索,即我们如何压缩一个状态的表示,使得 我们能够存储已经搜索过的状态的结果。这样能够避免大量重复状态的搜索。
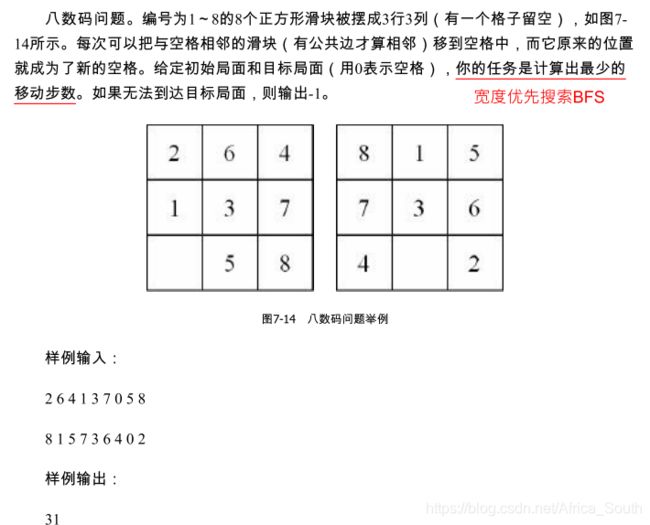
2. 问题举例(九宫格问题)
下面用经典的搜索问题 八数码(九宫格问题) 举例,参考算法竞赛经典入门 第二版。
OJ例题:
- POJ 1077 Eight
- HDUOJ 1043 需要离线打表
3. 问题分析
题中所说要找到移动步数最少的路径,即我们需要从起始状态到目标状态进行BDS(广度优先搜索),而我们需要考虑以下问题:
如何表示状态
显然,最直接的方式是直接用一个 3X3 的二维矩阵,简化为一个 1X9 的一维数组。
怎么进行状态压缩和记忆化搜索?
我们可以直接申请一个9维数组vis,然后根据vis[s0][s1][s2][s3][s4][s5][s6][s7][s8] 是否等于1来判重,需要的数组大小为 9 9 = 387 , 420 , 489 9 ^9 = 387,420,489 99=387,420,489 项,太多了,而且实际上最多的结点数也只有 0~8 的全排列 9 ! = 362 , 880 9! = 362,880 9!=362,880 项而已。
所以,如何进行状态压缩,常见右3种思路:
3.1 状态编码与解码
将每一种状态与一个整数编码一一对应起来,然后只开一个一维数组来判重。
而本题就是将 0 ~ 8 的排列数与 0 ~ 362879 对应起来,常见的方式是康拓展开,即 我们将一个排列数与其在所有排列中的字典序一一对应起来,例如 012345678 <–> 0 , 876543210 <–> 362879。
这种方法时间效率高,但是当状态空间的结点总数非常大时,编码也会很大,因为是一一对应的。
3.2 哈希映射
这种方法也是将状态映射成整数,但是不必是一一对应的。他可以映射到一个 [ 0 , M − 1 ] [0,M-1] [0,M−1] 范围内的整数,然后开一个 M 大小的数组来存储,相同哈希值的存放在一起,例如使用 链表 连在一起,称为一个 桶(bucket)。这种方法注意三点:
- 哈希表的大小M设置为多少,一般M越大,冲突的概率会比较小。
- 哈希函数怎么设置,即如何将状态映射成整数。在 哈希表中,哈希函数的作用很关键,一个设置良好的哈希函数应该保证哈希值的冲突尽可能少。这里,我们的哈希函数可以直接将状态映射成一个9位的排列数,然后对M取余。
- 冲突怎么解决,我们可以将相同哈希值的元素用链表连起来,也可以设置一个规则,如果冲突了,则向后或者向前移动几位等等。
3.3 集合判重
我们可以用一个STL中的
4. 问题实现
先给出这个问题的BFS的大致框架:
typedef int State[9]; // 定义状态,九宫格
const int maxn = 0x7fffff; // 最多的可能状态
State st[maxn]; // 存储状态
State goal; // 目标状态
int fa[maxn]; // 存储状态的前一状态
char pre[maxn]; // 存储前一状态变化到当前状态所用的操作
const char op[5] = "udlr";
const int dx[] = { -1,1,0,0 };
const int dy[] = { 0,0,-1,1 }; // 四个方向,上,下,左,右
void init_lookup_table();
int try_to_insert(int s);
void printState(State& s);
int bfs() {
// 若成功,则返回目标状态在状态数组中的位置
init_lookup_table(); // 初始化查找表
int front = 1, rear = 2;
while (front < rear) {
State& s = st[front]; // 使用“引用”指向同一片内存,节省赋值操作
//printState(s);
if (memcmp(s, goal, sizeof(s)) == 0) return front; // 成功
int z; // 0 的位置,即空格
for (z = 0; s[z] != 0; z++);
int x = z / 3, y = z % 3;
for (int i = 0; i < 4; i++) {
int newx = x + dx[i];
int newy = y + dy[i];
int newz = newx * 3 + newy;
if (newx >= 0 && newx < 3 && newy >= 0 && newy < 3) {
State& t = st[rear]; // 新状态
memcpy(t, s, sizeof(s));
t[newz] = s[z];
t[z] = s[newz];
fa[rear] = front;
pre[rear] = op[i];
if (try_to_insert(rear))
rear++; // 此状态没有出现过
}// if
}// for
front++;
}
return 0;
}
其中,init_look_table() 和 try_insert() 就是我们的判重操作,即初始化查找表和判断该状态是否已经搜索过。也就是我们上面所说的3种判重方式:
集合判重
set<int> vis;
void init_lookup_table() {
vis.clear();
}
int try_to_insert(int s) {
// 试图插入一个状态
State& ma = st[s];
int num = 0; // 转换为一个9位数
for (int i = 0; i < 9; i++) num = num * 10 + ma[i];
if (vis.count(num)) return 0;
else {
vis.insert(num);
return 1;
}
}
简单但是效率低。
哈希表
const int hashsize = 1e+6 + 3; // 哈希表的大小
int head[hashsize], Next[maxn]; // 哈希链表
void init_lookup_table() {
memset(head, 0, sizeof(head));
}
int hashfunc(State& s) {
// 一个状态的哈希函数
int num = 0;
for (int i = 0; i < 9; i++) num = num * 10 + s[i];
return num % hashsize;
}
int try_to_insert(int s) {
// 试图插入一个状态
State& ma = st[s];
int h = hashfunc(ma);
int u = head[h];
// 查找状态
while (u) {
if (memcmp(ma, st[u], sizeof(ma)) == 0) return 0; // 已经存在了
u = Next[u];
}
// 头插法插入结点
Next[s] = head[h];
head[h] = s;
return 1;
}
void printState(State& s) {
for (int i = 0; i < 9; i++) {
if(s[i]) printf("%d", s[i]);
else printf("X");
if ((i + 1) % 3 == 0) printf("\n");
else printf(" ");
}
}
编码解码
int vis[362880], fact[9]; // 判重数组和阶乘
void init_lookup_table() {
memset(vis, 0, sizeof(vis));
fact[0] = 1;
for (int i = 1; i < 9; i++) fact[i] = fact[i - 1] * i;
}
int canto(State& s) {
// 将一个状态转成康拓编码
int code = 0;
for (int i = 0; i < 9; i++) {
int cnt = 0; // 计算逆序数
for (int j = i + 1; j < 9; j++) if (s[j] < s[i]) cnt++;
code += cnt * fact[8 - i];
}
return code;
}
int try_to_insert(int s) {
// 试图插入一个状态
int code = canto(st[s]);
if (vis[code]) return 0;
else return vis[code] = 1;
}
示例AC代码
/* 八数码问题 BFS中状态空间搜索 */
#include推荐阅读
- 《算法竞赛入门经典 》7.5 路径搜索问题
- 八数码的八种境界