双摄像头深度剖析 (2):双Camera的生态链
1、双Camera算法供应商:
由于算法是需要跟ISP配合的,所以算法和ISP是相辅相成的,想把算法做好,也得有好的ISP。
做为主平台供应商,高通/联发科都有自己的ISP,所以也自己开发了双Camera算法。至于其算法好坏,还有待市场的检验。
而作为Sensor供应商,Sony, Samsung, OV也在积极开发双摄算法,暂时也没有看到量产的产品。不过在功能机时代,是没有ISP的。这些Camera sensor的供应商做2M/5M的时候,都得搭配自家的ISP,所以这些供应商都是有自己开发ISP的经验。所以开发双Camera算法,相对来说也是有相关的经验的。
Apple去年收购了Linx,也拥有了多摄像头的专利和算法,是否会用在自家的双Camera机型,那就看今年的iPhone7。理论来上说,Linx有足够多的算法,所以Apple不至于跟某大厂去买双Camera的IP授权。
除了这些平台,sensor供应商和智能机的品牌商会自己开发双camera算法外,其他供应商我们一一列举一下:

1996年成立于台湾的华晶,主要开发独立的ISP芯片。部分高端手机,相机,和车载都有用其ISP的案例。双Camera手机也有用其ISP的。距离应用,光学变焦和暗光补偿都有所建树。

一家以色列的公司。其算法的优势主要在光学变焦和暗光补偿上。景深方面,也有一定的研究。从媒体宣传来看,hTC有机型采用了其算法。
![]()
虹软成立于1994年,总部在美国,在上海,杭州和南京都有技术中心。虹软的强项是光学变焦和暗光补偿。上一篇里的第二个光学变焦图和暗光补充的图就来自虹软。

上海兴芯微是一家成立于2011年的公司,主要从事图像处理器的研发,目前产品主要应用在车载市场。做为为数不多的研发独立ISP的公司,目前也在开发双Camera的算法和ISP。在双Camera市场起来后,X-Chip将会是一匹非常有潜力的黑马。
双Camera也是刚刚出来, 所以算法方面,各家都有各自的优点和缺点。不过从目前已经推出的双Camera手机效果来看,各家的算法还有待提高。等各种算法能力上去后,势必会让双camera成为手机的标配。
2、 双Camera sensor 供应商
由于双Camera在拍照的时候,需要两个Camera同步时间戳,这就需要Camera Sensor就得有同步信号。目前有此同步信号的sensor供应商有Sony,Samsung,OV,格科微。所以双Camera的Sensor主要用这几家的产品。
3、双Camera 模组供应商
目前能做双Camera的模组厂很多,有光宝,舜宇,信利,Namuga,O-Film,三星机电,丘钛。不过有量产经验的主要是光宝,舜宇和信利。华为的机型主要是用光宝和舜宇的模组。而O-Film和三星机电凭借其强大的工厂能力,现在也大举进军双Camera模组领域。Namuga则是跟各算法公司保持良好的沟通关系,并为三星手机的供应商,也逐渐在双Camera模组领域发力。
不过不同功能对模组要求不一样。我们继续拿上一篇说的四个功能为例:
距离方面的应用
一般的做法,就是大小Camera,常见的Camera规格如13M+2M,13M+5M。如下图
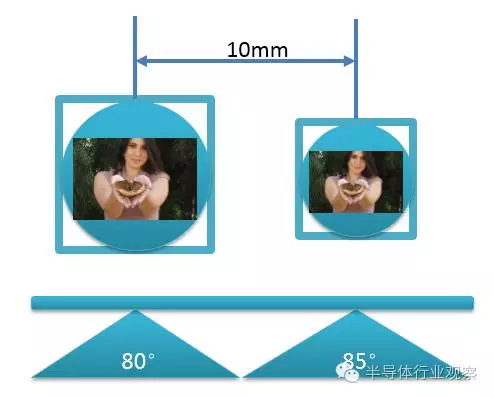
或者就是把两个Camera放的远一些,如下图
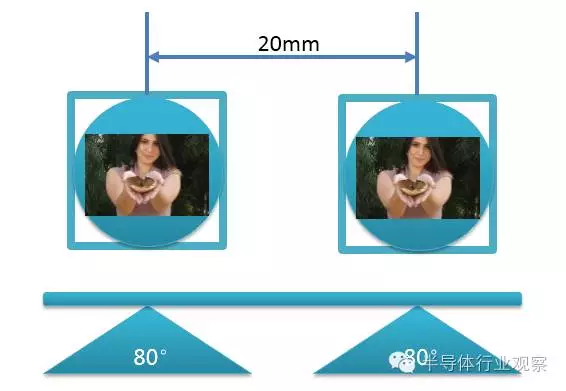
通过这两种方式,才能更好的计算被拍摄物体到镜头的距离。
光学变焦
光学变焦的双Camera模组,最主要是两个Camera需要有不同的FOV(镜头所能覆盖的视角范围),类似下图
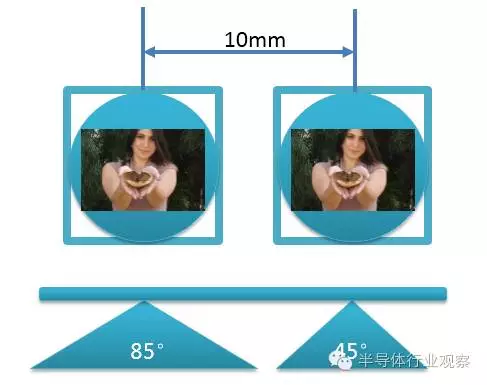
不同的FOV(镜头所能覆盖的视角范围),拍出来的聚焦点不同,再通过算法,就可以实现光学变焦功能。
暗光增强
一般的暗光增强,都是通过一个RGB全彩色的Camera + 一颗 MONO黑白的Camera进行拍摄,如下图
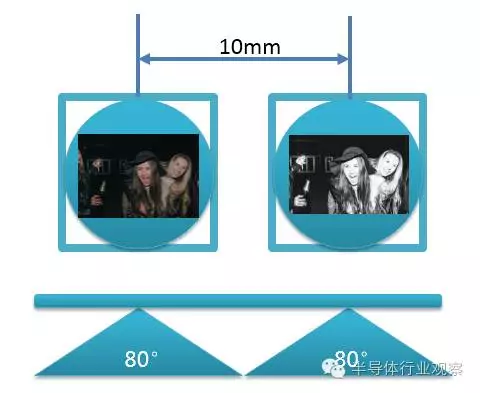
算法方面,主要是通过右面的黑白Camera 读取进光量的多少,从而补偿左边RGB Camera的色彩。
3D拍摄和建模
这种方式跟距离相关的模组有点类似。只是3D对距离的精准度要求更高。这种情况下,更需要将两个Camera的距离摆得远一点,甚至有些会采用外加红外辅助定位来实现距离测量,最终实现3D拍摄和建模的作用。
4、双Camera 模组制作的难点:
双Camera的做法,一般有两种:共基板,或者共支架。如下图:
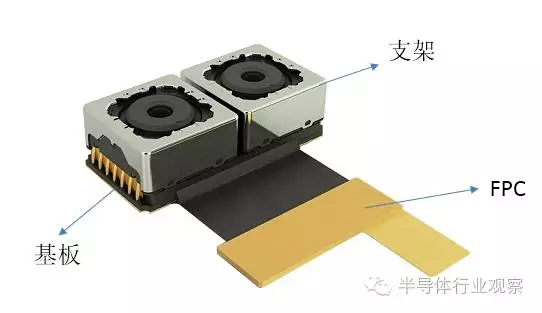
若共基板,则是将两个Camera Sensor 共同放在同一个基板上,然后一个FPC(一种具有可弯折的柔性电路板)从此基板上引出来即可。
若共支架,如上图,通过支架将Sensor固定住,每个sensor有自己的基板和自己的FPC(一种具有可弯折的柔性电路板)
共基板的优点:两个sensor 可以坐在同一个平板上,而且抗跌落
共基板的缺点:良率低,造成价格昂贵
共支架的优点:良率高,价格共支架的缺点:因为是两颗独立Sensor模组,需要通过AA校准使其在同一个平面上,难度大,抗摔落也差。
总之两种方法各有优缺点,目前只有华为采用的是共基板的方式。
但无论哪种方式,目前良率都是较差的,所以成本还是很高的。
5、双camera未来:
若算法提高,模组良率提高,双Camera还是有很多优势值得大家去做的。
不过由于不同功能对模组摆放要求不同,双Camera目前来看,有可能完全无法满足大家对Camera的要求。
由于谷歌推出Project Tango的时候,很聪明的提出了一个三Camera的概念:
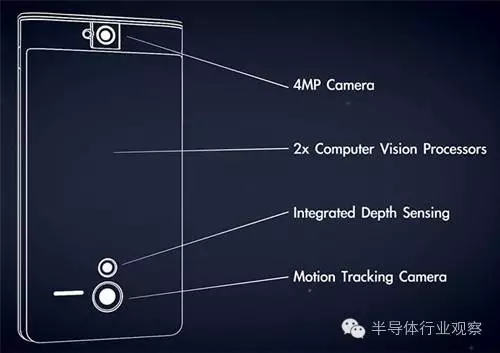
当需要测距和3D建模的时候,可以用两个距离远的Camera;若做光学变焦和暗光补偿,可以用两个距离近的镜头。甚至此Depth Sense 可以结合红外,更准确的测量距离。
无论如何,随着双Camera算法的演进,VR需求的增加,Camera发挥的作用越来越大。双Camera,甚至前双Camera+后三Camera的手机。