二分图的判定,最大匹配
<1>.什么是二分图
如果一个图的顶点可以分为两个集合X和Y,图的所有边一定是有一个顶点属于集合X,另一个顶点属于集合Y,则称该图为“二分图”( Bipartite Graph )
<2>.二分图的判定
- 如果一个图是连通的,可以用如下的方法判定是否是二分图:
- 在图中任选一顶点v,定义其距离标号为0,然后把它的邻接点的距离标号均设为1,接着把所有标号为1的邻接点均标号为2(如果该点未标号的话),如图所示,以此类推。
- 标号过程可以用一次BFS实现。标号后,所有标号为奇数的点归为X部,标号为偶数的点归为Y部。
- 接下来,二分图的判定就是依次检查每条边,看两个端点是否是一个在X部,一个在Y部。
(如果一个图不连通则在每个连通块中作判定)

算法实现;
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
<3>.最大匹配
匹配定义; 令G(V,E) 是一个无向图,若存在边集M ,使得M中所有的边都没有公共顶点,则称M是G的一个匹配(matching)。
最大匹配;边数最多的匹配称为最大匹配
完美匹配;,如果所有的点都在匹配边上,称这个最大匹配是完美匹配
增广路径
如果P是图G中一条连通两个未匹配顶点的路径(P以未匹配点为起点和终点的路径),并且属M的边和不属于M的边(即已匹配和待匹配的边)在P上交替出现,则称P为现对于M的一条增广路径
二分图的最大匹配-增广路径
令M是G的一个匹配,则P是M的一条增广路径;则![]() 是G的一个大小为|M|+1的匹配。
是G的一个大小为|M|+1的匹配。
![]()
![]()
新增的边或者是M的边,或者是P的边,但不是即在M的边,也在P的边。
举例;
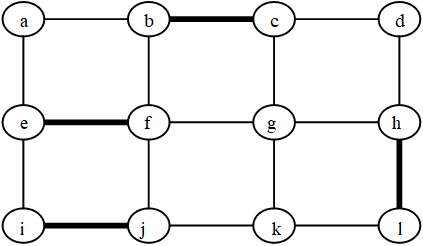
边集;M={(b,c),(e,f),(i,j),(h,l)}
![]()
![]()
![]()


推出三个结论;
1)P的路径长度必定为奇数,第一条边和最后一条边都不属于M
2)P经过取反操作可以得到一个更大的匹配M
3) M为G的最大匹配当且仅当不存在相对于M的增广路径
<4>.匈牙利算法(求二分图的最大匹配)
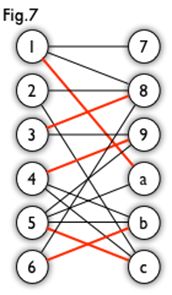
<匈牙利树>;一般由 BFS 构造(类似于 BFS 树)。从一个未匹配点出发运行 BFS(唯一的限制是,必须走交替路),直到不能再扩展为止。例如,由图 1,可以得到如图 2的一棵 BFS 树,如果所有的叶子都是匹配点,则这课BFS树是匈牙利树

算法实现
(1). 置M(匹配)为空
(2). 找出一条增广路径P,通过取反操作获得更大的匹配M’代替M
(3). 重复(2)操作直到找不出增广路径为止。
>>>细节
对于二分图A侧(可以把点少的一侧看作A侧)的每个点,依次如下操作:
1.设置A[i]为当前点。
2.用A侧和B侧的点轮流进行如下操作。
(1)对A侧的点A[i]:找到一条没有匹配的边。如果边的B侧的点不属于匹配中另外的边,那么这个时候表示增广路径找到了(初始情况下直接相连的一条边的最大匹配就属于这种情况),修改最大匹配。如果边的B侧的点属于匹配中另外的边,设B侧的点为B[j],则进入(2)。如果这些都做不到,需要进行回溯。如果回溯到了起点,表明从起点A[i]找增广路径失败了。注意,能否找到增广路径全由A侧的点决定(找边和回溯),B侧的点做的操作非常简单。
(2)对B侧的点B[j],由于是找增广路径,已匹配的边需要用到,故直接找到B[j]所在的匹配边在A侧对应的点A[k],把A[k]置为当前点继续进行步骤(1)。
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include