2---理解正余弦、复数求模、反正切和乘除运算的CORDIC算法实现
CORDIC(Coordinate Rotation Digital Computer)算法是J.Volder在1956在航空控制系统设计中构思的,但其实相似的算法在更早的1624年就已经被Henry Briggs公布了。https://en.wikipedia.org/wiki/CORDIC
CORDIC的基本思想: 通过坐标旋转不断的迭代,去逼近一个设定的值,其核心是每次迭代旋转的角度是上一次的一半(类似于2分法),这样计算可通过加法和移位实现,适合数字电路实现。
CORDIC能实现的计算: 乘、除、平方根、正弦、余弦、反正切、复数乘法、坐标转换、指数运算等
CORDIC算法原理参考链接:
Xilinx CORDIC算法
三角函数计算,Cordic 算法入门
1. 圆周旋转,计算正余弦、复数求模、反正切
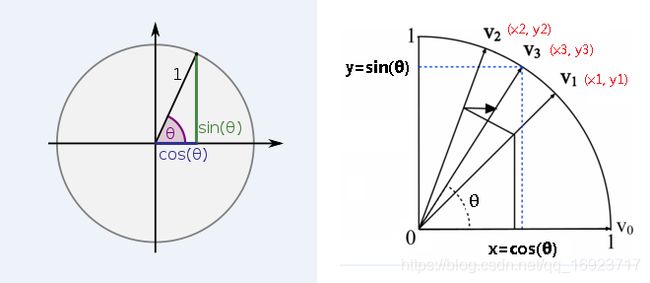
先看下边第一个图,圆周旋转其实就是对圆坐标系上的点进行旋转,从图中可以看到3个参数,坐标参数(x,y)和角度值 θ \theta θ,如果圆的半径 R = 1 R = 1 R=1,则有
x = cos θ x = \cos\theta x=cosθ
y = sin θ y = \sin\theta y=sinθ
R = x 2 + y 2 = cos 2 θ + sin 2 θ = 1 R = \sqrt{x^2 + y^2} = \sqrt{\cos^2\theta + \sin^2\theta} = 1 R=x2+y2=cos2θ+sin2θ=1
那么如果我们知道角度为 θ \theta θ时的坐标参数 ( x , y ) (x, y) (x,y),我们就能知道 θ \theta θ的正余弦函数值
cos θ = x \cos\theta = x cosθ=x
sin θ = y \sin\theta =y sinθ=y
那么怎么获得这个坐标参数呢,请看下边第二个图,我们想要计算的角度值为 θ \theta θ,其对应的坐标值为 ( x 3 , y 3 ) (x_3, y_3) (x3,y3),我们通过旋转来不断的逼近这个坐标点 V 3 V_3 V3,每次旋转的角度都是固定的,并且越来越小。如果旋转超过了 V 3 V_3 V3,如 V 1 V_1 V1到 V 2 V_2 V2的旋转,则下次旋转的方向与之前相反。就这样不断的在 V 3 V_3 V3附近摆动,因为旋转的角度不断减小,所以会越来越接近 V 3 V_3 V3。这个在目标值附近不断摆动并接近目标值的过程就是迭代。
迭代需要注意的细节有
- 半径R的伸缩
- 每次迭代要旋转的固定角度
这里会涉及到几个公式如下,公式详细可参考Xilinx CORDIC算法
x i + 1 = x i − d i ( y i 2 − i ) x_{i+1} = x_i - d_i(y_i2^{-i}) xi+1=xi−di(yi2−i)
y i + 1 = y i + d i ( x i 2 − i ) y_{i+1} = y_i + d_i(x_i2^{-i}) yi+1=yi+di(xi2−i)
z i + 1 = z i − d i θ i z_{i+1} = z_i - d_i\theta_{i} zi+1=zi−diθi
i i i是迭代次数, d i d_i di是判断算子,用来确定旋转的方向, z z z是角度累加器。
怎么计算正余弦
计算正余弦就是要计算坐标值,此时我们已经知道了角度值 z z z,计算正余弦的过程如下
- 设定初始的坐标为(1, 0)
- 旋转 z z z个角度,即使 z z z趋于0
- 最终得到的 x x x和 y y y的值就是我们要的正余弦函数值
可通过下面这段MATLAB代码来理解
for i = 0:1:itime % itime为迭代次数
if z0 > 0 % z0生成判断算子,确定旋转方向
x = x0 - y0 / 2^(i);
y = y0 + x0 / 2^(i);
z = z0 - atan(1/2^i);
else
x = x0 + y0 / 2^(i);
y = y0 - x0 / 2^(i);
z = z0 + atan(1/2^i);
end
x0 = x;
y0 = y;
z0 = z;
end
怎么计算复数求模和反正切
先看我们要求的是什么
∣ a + b i ∣ = ( a ) 2 + ( b ) 2 = ( ( a ) 2 + ( b ) 2 ) 2 + ( 0 ) 2 |a + bi| = \sqrt{(a)^2 + (b)^2} = \sqrt{(\sqrt{(a)^2 + (b)^2})^2 + (0)^2} ∣a+bi∣=(a)2+(b)2=((a)2+(b)2)2+(0)2
t a n − 1 ( a ) = t a n − 1 ( a 1 ) = t a n − 1 ( y x ) = θ tan^{-1}(a) = tan^{-1}(\frac{a}{1}) = tan^{-1}(\frac{y}{x}) = \theta tan−1(a)=tan−1(1a)=tan−1(xy)=θ
其中 y = a y = a y=a, x = 1 x = 1 x=1
计算正余弦函数的过程可以看成是第二图中 V 0 V_0 V0到 V 3 V_3 V3的旋转,而计算复数求模和反正切就可以看成是** V 3 V_3 V3到 V 0 V_0 V0的旋转**,即初始我们是知道 ( x 3 , y 3 ) (x_3, y_3) (x3,y3)的,然后我们要求 ( x 0 , 0 ) (x_0, 0) (x0,0)的值,因为这是圆周旋转,所以这里有一个隐含条件
( x 3 ) 2 + ( y 3 ) 2 = ( x 0 ) 2 + ( 0 ) 2 = ∣ x 0 ∣ \sqrt{(x_3)^2 + (y_3)^2} = \sqrt{(x_0)^2 + (0)^2} = |x_0| (x3)2+(y3)2=(x0)2+(0)2=∣x0∣
那么复数求模 a + b i a + bi a+bi的过程如下
- 设定初始值 x 0 = a , y 0 = b , z 0 = 0 x_0 = a, y_0 = b, z_0 = 0 x0=a,y0=b,z0=0。如果只求模, z z z其实无所谓,因为求解过程不需要用到 z z z
- 使 y y y趋于0
- 迭代完成后的结果 x x x就是复数的模
求反正切的过程与复数求模基本一致,因为都是 V 3 V_3 V3到 V 0 V_0 V0的旋转,在这个迭代过程中, z z z一直在积累角度,迭代完成后** z z z的值就是旋转的角度 θ \theta θ**。即有
θ = t a n − 1 ( b a ) \theta = tan^{-1}(\frac{b}{a}) θ=tan−1(ab)
如果我们将初始值 y y y设为 x = a = 1 x = a = 1 x=a=1,那么 b b b的反正切函数值为
t a n − 1 ( b ) = z = θ tan^{-1}(b) = z = \theta tan−1(b)=z=θ
计算复数求模和反正切函数值的MATLAB代码
for i = 0:1:itime % itime为迭代次数,迭代的越多,越精确
if y0 < 0 % y0生成判断算子,确定旋转方向
x = x0 - y0 / 2^(i);
y = y0 + x0 / 2^(i);
z = z0 - atan(1/2^i);
else
x = x0 + y0 / 2^(i);
y = y0 - x0 / 2^(i);
z = z0 + atan(1/2^i);
end
x0 = x;
y0 = y;
z0 = z;
end
2. 线性旋转,乘除运算的CORDIC实现
Xilinx CORDIC算法在介绍线性旋转的时候有说到一个线性坐标系,有的讲CORDIC的书里也有提到线性坐标系旋转,但是也有的书里是没有提到的,而且在百度和谷歌里都没搜到“线性坐标系”这个名词,所以也不知道是不是对的。不过从下面这个图来理解线性旋转好像确实有点不好理解,所以就先不管了。
- 线性旋转的迭代过程可表示为
x i + 1 = x i x_{i+1} = x_i xi+1=xi
y i + 1 = y i + d i ( x i 2 − i ) y_{i+1} = y_i + d_i(x_i2^{-i}) yi+1=yi+di(xi2−i)
z i + 1 = z i − d i ( 2 − i ) z_{i+1} = z_i - d_i(2^{-i}) zi+1=zi−di(2−i)
- 选择 d i = s i g n ( z i ) d_i = sign(z_i) di=sign(zi)使得 z i → 0 z_i → 0 zi→0。 n n n次迭代后得到
x n = x 0 x_n = x_0 xn=x0
y n = y 0 + x 0 z 0 y_n = y_0 + x_0z_0 yn=y0+x0z0
z n = 0 z_n = 0 zn=0
如果初始 y 0 y_0 y0设为0,那么迭代完成后就可以得到 x x x与 z z z的乘积。
- 选择 d i = − s i g n ( x i y i ) d_i = -sign(x_iy_i) di=−sign(xiyi)使得 y i → 0 y_i → 0 yi→0。 n n n次迭代后得到
x n = x 0 x_n = x_0 xn=x0
y n = 0 y_n =0 yn=0
z n = z 0 + y 0 x 0 z_n = z_0 + \frac{y_0}{x_0} zn=z0+x0y0
如果初始 z 0 z_0 z0设为0,那么迭代完成后就可以得到 y y y除 x x x的商。
其实上面的过程隐含了一个等式
y = x z y = xz y=xz
我们都知道乘法可以通过二进制的移位相加来实现,如6乘以5
5 = 2 2 + 2 0 5 = 2^2 + 2^0 5=22+20
则 6乘5 = 6左移2位 + 6
6*5 = 0b(11000) + 0b(00110) = 0b(11110) = 30
所以求乘积的过程就是 x 0 x_0 x0不断移位相加的过程,这个过程会近似乘完所有 z 0 z_0 z0的分解项(分解成如 5 = 2 2 + 2 0 5 = 2^2 + 2^0 5=22+20的形式),每次乘积后累加,最后得到 y n y^n yn。
而求商的过程则与求乘积的过程恰好相反
乘法迭代的MATLAB代码
for i = -indx:15 % 注意indx
if z0 > 0
x = x0;
y = y0 + x0 / 2^(i);
z = z0 - (1/2^i);
else
x = x0;
y = y0 - x0 / 2^(i);
z = z0 + (1/2^i);
end
x0 = x;
y0 = y;
z0 = z;
end
注意 2 i n d x 2^{indx} 2indx必须大于 z 0 z_0 z0的 1 2 \frac{1}{2} 21,否则迭代不会收敛,即 z z z不会趋于0
除法迭代的MATLAB代码
for i = -indx:15
if y0 < 0
x = x0;
y = y0 + x0 / 2^(i);
z = z0 - (1/2^i);
else
x = x0;
y = y0 - x0 / 2^(i);
z = z0 + (1/2^i);
end
x0 = x;
y0 = y;
z0 = z;
fprintf('x0 = %d, y0 = %d, z0 = %d\n', x0, y0, z0)
end
注意 x 0 ∗ 2 i n d x x_0*2^{indx} x0∗2indx必须大于 y 0 y_0 y0的 1 2 \frac{1}{2} 21,否则迭代不会收敛,即 y y y不会趋于0
为什么不会收敛呢
因为”一尺之棰,日取其半,万世不竭”…………
拿乘法来说,假设 z 0 = 100 z_0 = 100 z0=100, i n d x = 5 indx = 5 indx=5,那迭代 n n n次之后有
z n = z 0 − ( 2 5 + 2 4 + . . . + 2 5 − n + 1 ) = 100 − 2 6 ( 1 − 2 − n ) = 36 + 2 6 − n z_n = z_0 - (2^5 + 2^4 + ... + 2^{5-n + 1}) = 100 - 2^6(1 - 2^{-n}) = 36 + 2^{6-n} zn=z0−(25+24+...+25−n+1)=100−26(1−2−n)=36+26−n
即不管迭代多少次, z n z_n zn是永远大于36的,所以不能收敛。