博弈树
博弈树的搜索
博弈树定义:
一类特殊的与或图
(本次讨论的博弈树都是“与或图”)
应用范围:
下棋、故障诊断、风险投资
基本搜索策略:
极小极大搜索(min-max)
优化的搜索方法:
α-β剪枝搜索
(剪枝)
(搜索与生成同时进行)
了解背景:
(完全博弈问题)博弈问题
特点:
双人对弈:轮流下,一人走一步。
信息完备:双方看到的信息一样
零和:双方利益冲突,对一方有利则对另一方不利。一般对节点N取一个估价函数f(N),一共两类节点:
——叫Max的极大节点追求最大化,有选择时肯定选值最大的;
——叫Min的极小节点追求最小化,有选择时肯定选值最小的。
例子1:下棋
两位选手对垒,轮流走步。这时每一方不仅知道对方过去已经走过的棋步,而且还能估计出对方未来可能的走步。对弈的结果是一方赢(另一方则输),或者双方和局。如象棋,围棋,五子棋,…
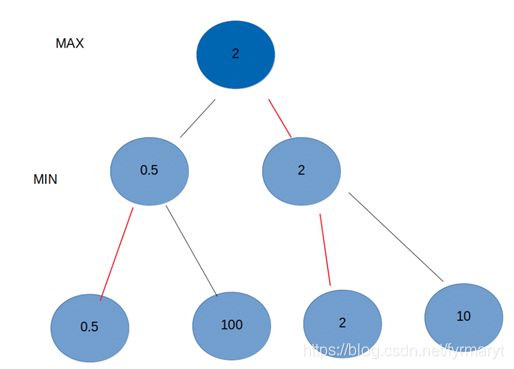
例子2:选包拿钱
假设有两个钱包,每个钱包都放2张钱,第一个放了0.5元和100元,第二个放了2元和10元, Max和Min两个人是仇敌。现在Max负责挑出一个包,Min负责从Max选的包里选一张小的钱给Max。
因为Max想让自己的钱越多越好而Min不想让Max钱多,所以Min会选一张相对最小的钱给Max。也即,Max想获得最大利益,而Min只是想承受最小的对手变强程度。在这种情况下Max应该选择包2,Min会给他2元。如果Max选择了包1 ,Min只会给他选0.5元。
完全信息博弈抽象出任务原型:
给出(或逐步生成)一个博弈树,求出在指定搜索深度(层数)下的最佳路径和相应估价分数。比如下象棋,Max先走一步,Min再走一步,再轮到Max走,这时Max遇到的各个局面可以估分,再倒推回去Max的第一步应该选择走哪步最佳
基本搜索策略:极小极大搜索(min-max)
为了提高极小极大搜索方法的速度,所以采用剪枝,最主要的是α-β剪枝
不完全信息博弈情况:
大部分纸牌游戏(如斗地主、拖拉机)
大部分即时策略游戏(如红警、星际、帝国)
——需要探路(即信息不对等)
——游戏还受手速(APM)影响
但是博弈问题常常不能简单穷举,以中国相亲为例:
——一盘棋平均走50步,总状态数约为10的161次方。假如一毫微秒走一步,约需10的145次方。
——结论:不可能穷举
极小极大搜索方法:
极小极大搜索方法是博弈树搜索的基本方法 。
首先假定,有一个评价函数可以对所有的棋局进行评估。当评价函数值大于0时,表示棋局对我方有利,对对方不利。当评价函数小于0时,表示棋局对我方不利,对对方有利。
方法过程:
1、当轮到我方走棋时,首先按照一定的搜索深度生成出给定深度d以内的所有状态,计算所有叶节点的评价函数值。然后从d-1层节点开始逆向计算:
2、对于我方要走的节点(用MAX标记,称为极大节点)取其子节点中的最大值为该节点的值(因为我方总是选择对我方有利的棋)。
3、对于对方要走的节点(用MIN标记,称为极小节点)取其子节点中的最小值为该节点的值(对方总是选择对我方不利的棋)。
4、一直到计算出根节点的值为止。获得根节点取值的那一分枝,即为所选择的最佳走步。

因此,极小极大过程是一种假定对手每次回应都正确的情况下,如何从中找出对我方最有利的走步的搜索方法。
值得注意的是,不管设定的搜索深度是多少层,经过一次搜索以后,只决定了我方一步棋的走法。等到对方回应一步棋之后,需要在新的棋局下重新进行搜索,来决定下一步棋如何走。
对于静态估计函数f(x)
一般规定有利于MAX的势态,f§取正值,有利于MIN的势态,f§取负值,势均力敌的势态,f§取0值。若f§=+∞,则表示MAX赢,若f§=-∞,则表示MIN赢。下面的讨论规定:顶节点深度d=0,MAX代表程序方,MIN代表对手方,MAX先走。
当用端节点的静态估计函数f(p)求倒推值时,两位选手应采取不同的策略,从下往上逐层交替使用极小和极大的选值方法,故称极小极大过程。
个人总结:
极小极大搜索——从一个原始状态节点,根据估值函数,对后面出现的可能状态进行估值,在一定深度内通过一个路径选择方式(max层节点从子节点选择最大的值,min层节点从子节点总选择最小的值),选择出最优的路径(该路径为到达最优值所在节点路径)。
α-β剪枝搜索过程:
能否在搜索深度不变的情况下,利用已有的搜索信息减少生成的节点数呢?
MIN-MAX过程是把搜索树的生成和格局估值这两个过程分开来进行,即先生成全部搜索树,然后再进行端节点静态估值和倒推值计算,这显然会导致低效率。
实际上把生成和倒推估值结合起来进行,再根据一定的条件判定,有可能尽早修剪掉一些无用的分枝,同样可获得类似的效果,这就是α-β过程的基本思想。
注意: α-β剪枝搜索和生成扩展子节点是同步的。其得到的最优解结果与Min-Max过程一致
Min-Max过程和α-β剪枝搜索的结果都受生成/搜索策略顺序有关(比如选择广度优先或者深度优先,结果可能不一样)
简单例子:

由图3可知,对于min-max搜索,得到的最优路径为A1-A11。max得分为3
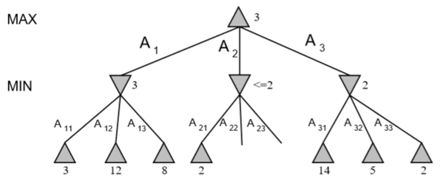
而图4是通过α-β剪枝方法得到的,同样得到最优路径为A1-A11。max得分为3。
例子2:
对该搜索树进行左边深度优先α-β剪枝搜索

左边为原搜索树,右边为α-β剪枝搜索
——极小值节点I的N子树被剪枝了( α剪枝)
——极大值节点G的L子树被剪枝了(β剪枝)
α-β搜索方法定义:
Max节点的下界为α,即Max确保能获得的最小得益。初始化为-inf。
Min节点的上界为β,即Min付出的上界代价保障。初始化为+inf。
对于节点N的估计函数值f(N),初始化α =-inf ≤ f(N) ≤ β=+inf
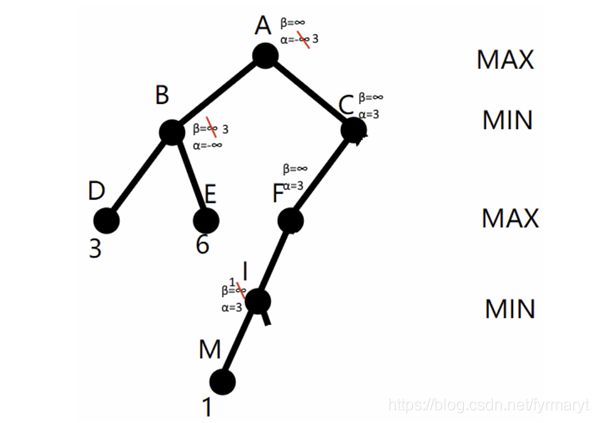
若 α ≤ β则N有解。若 α > β 则N无解(为什么无解?因为对于上一层,min/max层不会选择该路径的节点了,故而可以放弃搜索),该节点N的其他未访问子树会被剪枝
如图中节点I,从左子树DBE可以获得下界α=3,并传送到右边的极小节点I,此时I的子节点M给了个上界β=1。所以α=3> β=1,下界α大于上界β ,无解。
理解:
极大节点N,从一个子树获得的α值和β值,可以传送给其子节点
极大节点N 的α值只可能越改越大,否则极大节点N可以还选择原有α值
极小节点M的β值只可能越改越小,否则极小节点M可以还选择原有β值
从单边子节点往父节点推,极大值父节点只更改α值,极小值父节点只更改β值。

α剪枝(发生在极小层节点,如图中的节点I)
(1)α剪枝:若任一极小值层节点的β值小于或等于它任一先辈极大值层节点的α值,即α(先辈层)≥β(后继层),则可中止该极小值层中这个MIN节点以下的搜索过程。这个MIN节点最终的倒推值就确定为这个β值。
从一个子树获得的极大节点的α值,可以传送给该节点的其他子树,从而选择α剪枝机会(课本说法,和“先辈”节点α值比较,是和所有先辈节点比较,而不是仅仅和父节点比较)。
从单边子节点往父节点推,极大值父节点只更改α值,极小值父节点只更改β值
注意看极小节点I:
极大节点A从左子树获得α值3,从而可以把α=3传播给右子树,在极小节点I点由于子节点M值为1从而可以确认β=1,此时α=3> β=1,从而I的其他节点可以被α剪枝, I点的β=1。

β剪枝(发生在极大层节点,如图中的节点G)
(2)β剪枝:若任一极大值层节点的α值大于或等于它任一先辈极小值层节点的β值,即α(后继层)≥β(先辈层),则可以中止该极大值层中这个MAX节点以下的搜索过程。这个MAX节点的最终倒推值就确定为这个α值。
从一个子树获得的极小节点的β值,可以传送给该节点的其他子节点,从而选择β剪枝机会(课本说法,和“先辈”节点β值比较,是和所有先辈节点比较,而不是仅仅和父节点比较)。
从单边子节点往父节点推,极大值父节点只更改α值,极小值父节点只更改β值
注意看极大节点G:
极小节点C通过部分计算(A左子树和F子树)获得α=3和β=5 ,从而可以把α=3和β=5传播给极大节点G,在极大节点G点由于子节点K值为6从而可以确认α=6 ,从而G点此时α=6> β=5,从而G的其他节点可以被β剪枝,G点的α=6 。
祭出终极例子3:

α-β搜索方法总结:
1、α-β剪枝后选得的最好优先走步,其结果与不剪枝的MINIMAX方法所得完全相同,因而α-β过程具有较高的效率。
2、α-β剪枝最理想的情况是,Min节点先扩展最低估值子节点,Max节点先扩展最大估值节点。(这个策略可以用于启发式α-β剪枝搜索)
思考问题:为什么所有α-β剪枝搜索例子都是用深度优先策略?
因为深度优先更有机会发生剪枝。