无线传感器网络
体系结构
① 什么是无线传感器网络?其特点是什么?
无线传感器网络(Wireless sensor network)是由大量静止/移动的传感器以自组织和多跳的方式构成无线网络。目的是协作地探测、处理、传输网络覆盖区内感知对象的监测信息,并报告给用户。
WSN特征:
------------------四大受限------------------
能量受限:使用电池供电,因需要维持数年生命周期所以需要节能。
通信能力受限:使用 ISM 频段,带宽资源十分有限,不能支持很高的数据率。
计算能力受限:传感器节点需要满足低成本、低功耗的要求,这就意味着节点计算能力受限。
存储能力受限:传感器节点需要满足低成本的要求,这就意味着存储空间有限,不能使用像 Windows、Android 这样的操作系统。
------------------组网特征------------------
大规模:绿野千传部署了几千个传感器节点。
自组织:根据网络状态自行组网。
拓扑动态性:节点可能会移动、死亡、新加入。
可能存在异构传感器:为了安防目的,部署了摄像头、位移传感器等。
需要数据融合等技术:为了安防目的,需要从摄像头、位移传感器等感知数据综合提取信息,确定是否有人入侵、身份信息等。
应用相关性强:在智能交通、安防、环境监测等应用中部署的传感器各异、服务质量要求各异。
任务/事件驱动,以数据为中心:当检测有人入侵时,才会向用户发出警报发送视频数据。
对可靠性和鲁棒性有要求:当火灾发生时,烟雾报警器一定要可靠地将报警数据发送出去。
② 传感器网络的节点由哪些部分组成?这些组成模块的功能分别是什么?
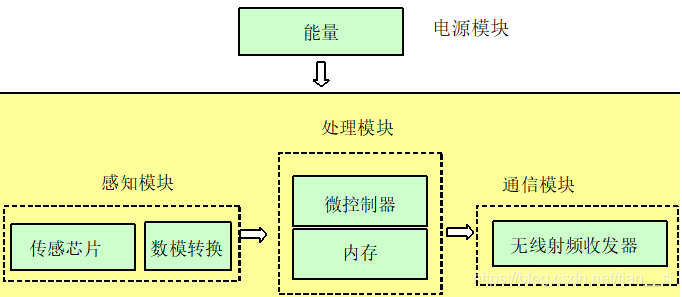
感知模块:由一个或多个传感器以及模数转换器组成。传感器负责感知监测目标的物理特征和现象,并产生相应的模拟信号;模数转换器ADC负责将模拟信号转换为数字信号,并将数字信号送往处理模块进行处理。
处理模块:由一个微控制器及相应的内存组成,负责对数据进行处理、滤波、决策、执行、资源分配等判断,并对传感器节点进行控制。
通信模块:由数模转换器和无线收发器组成,负责发送、接收数据和控制信息。
电源模块:负责节点的供电。
位置模块:节点可以配置全球定位系统或北斗定位系统接收器。
移动模块:在某些需要移动传感器节点的应用中,可以配置马达来驱动传感器节点。
③ 传感器节点的能量消耗主要在哪些模块?
感知模块(采集数据)、处理模块(CPU运转)、通信模块(数据收发、空闲侦听),其中通信模块能耗最大。
④ 为什么WSN通常采用多跳通信方式?
与信号传播模型有关, P r x = P_{rx} = Prx= P t x P_{tx} Ptx C d 2 \frac{C}{d^2} d2C
⑤ WSN 有哪些资源上的限制?会如何影响 WSN 的设计?
通信:数据压缩、调制技术选择。
能量:物理层提高数据发送速率、休眠、路由选择、传输时尽量减少丢包、时间同步考虑节能。
存储:不能使用复杂的操作系统、数据报不能太大、数据压缩。
计算:不使用复杂的路由协议。
⑥ WSN 五层协议的功能是什么?
物理层:通过编码/调制/扩频和其他无线通信模块将数据转换为无线信号。
链路层:负责一跳距离内相邻节点的信道共享、睡眠问题,保障在节点间公平有效地共享通信资源。
网络层:解决寻路、逐跳转发数据的问题。
传输层:负责端到端的数据流传输,具有可靠传输和拥塞控制机制。
应用层:负责任务调度和数据分发等具体业务,使得底层硬件和软件对传感应用是透明的。
MAC和路由
① 为什么 MAC 和路由设计中能量是需要考虑的重要因素?
传感器节点能量受限。
② 当前传感器网络的无线通信主要选择哪些频段?为什么?
ISM (Industrial,Scientific,Medical),免费。
③ 基于竞争/分配的MAC协议的基本思想是什么?其优缺点各是什么?
------------------基于竞争------------------
基本思想:允许多个节点同时访问信道,发送时主动抢占,按需分配。
优点:网络流量和规模变化自适应,网络拓扑变化自适应,算法较简单。
缺点:无法避免冲突,不适合流量较大的网络。
------------------基于分配------------------
基本思想:与TDMA类似,将时间分为固定长度的时隙slot,给每个节点分配时隙避免冲突,使得每个节点都有机会访问介质。
优点:无冲突,无隐藏终端问题,易于节点休眠。
缺点:时间同步不易实现,网络动态性、多跳给时隙分配带来困难,分配算法较为复杂,可扩展性较差。
④ 叙述无线传感器网络SMAC的主要特点和实现机制。
前提条件:网络数据量较小、对数据投递延迟不敏感、网络节点间联合完成数据投递任务。
周期性休眠/监听:
每个周期内,节点有侦听和休眠两种状态。相邻节点之间协商,以保持同步侦听、同步休眠(即:同醒同睡)。相邻节点同步调度,形成虚拟簇。协议效果:节点能耗降低,数据投递延迟增加。

冲突和串音避免:
对于冲突,采用与802.11类似的CSMA/CA和RTS/CTS握手机制来尽量避免,能够解决隐藏终端的问题。
对于串音,采用虚拟载波监听机制,根据数据帧的特殊字段(告知休眠多久)让每个与此次通信无关的邻居节点进入休眠状态,这样发送和接收节点处于独享信道的状态。
自适应监听:
在一次通信过程中,通信节点的邻居节点在此次通信结束后保持苏醒并监听信道一段时间。如果监听节点在这段时间内接收到发给自己的RTS控制帧,则可以立即接收数据,而不需要等到下一个监听周期,从而减少了数据投递延迟。
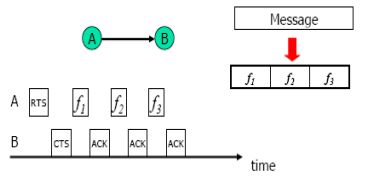
长消息分割传送:
将一个长的数据块切分成若干个短的数据包进行传输,仅使用一个RTS消息和一个CTS消息为上述所有短数据包预约信道。每个短数据包都有独立的链路层ACK保障其传输成功。这样做降低了单个数据报的差错率,降低了控制开销,减小了消息延时。
⑤ 叙述无线传感器网络XMAC的主要特点和实现机制。
异步竞争 MAC 协议:该类协议中所有节点维持自己独立的工作周期,收发双方不同步,因而发送节点发出数据时接收节点可能正处于睡眠状态,所以需要使用LPL(低功率侦听)前导序列技术唤醒接收节点。
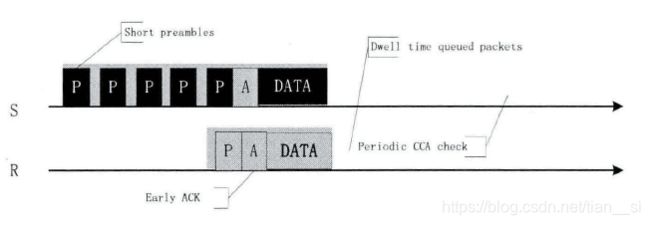
X-MAC协议是基于B-MAC协议的改进,改进了其前导序列过长的问题,将前导序列分割成若干strobe,在每个strobe中嵌入目的地址信息,非接收节点尽早丢弃分组并睡眠。
X-MAC在发送两个相邻的strobe之间插入一个侦听信道间隔,用以侦听接收节点的早期确认。接收节点收到strobe后,向发送节点发送早期确认。发送节点收到早期确认后立即发送数据分组,避免发送节点过度前导和接收节点过度侦听。
⑥ 常见的传感器网络路由协议有哪些类型?并说明各种类型路由协议的适用范围。
主动式路由:不管有没有数据发生,每个节点都建立和维护到各个节点的路由。要求每个节点周期性地向其他节点发送最新的路由信息并保存一个或多个路由表。
适用范围:数据流量大、移动性较小、实时性要求较高。
反应式路由:网络拓扑和路由信息是按需建立的,仅当某节点有数据发送时才开始寻找路由。
适用范围:数据流量小、移动性强、实时性要求不高。
平面路由:所有节点都具有相同的地位和功能,协同完成感知和通信任务。协议简单、健壮性好、建立维护路由开销大。
适用范围:小规模网络。
分层路由:网络被分为多个簇或层次,每个簇由一个簇首和多个簇成员构成。簇首负责簇内信息的收集和融合以及簇间数据转发。
适用范围:中大规模网络。
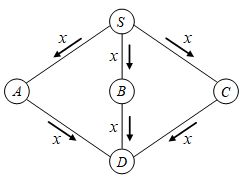
数据为中心路由协议:在以数据为中心的路由中,感知到特定物理现象的传感器节点将感知到的数据向sink节点汇报。路径上的节点可以检查收到的分组的内容,并根据情况执行特定的数据融合操作。
适用范围:数据具有相关性,可以压缩或融合处理的网络。
基于位置的路由协议:要求每个节点具备自身位置、每个邻居节点位置和目的节点位置等信息来确定分组的最佳下一跳节点,可以采用逐跳方式进行数据转发,具有较好的可扩展性。
适用范围:具备位置信息的网络。
多路径路由协议:通过多条可供选择的路径传送数据,能够提高数据传输的鲁棒性,有效均衡网络的负载和能耗,提高网络的传输性能并延长网络的寿命。
适用范围:对可靠性要求较高、要求负载均衡的网络。
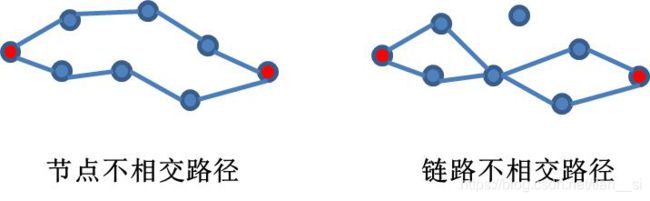
⑦ 多路径路由(链路不相交、节点不相交、缠绕多路径)的定义,以及各自的优缺点有哪些?
不相交多路径路由:用于在源节点和目的节点间建立多条不相交路径。分为节点不相交路径和链路不相交路径。
节点不相交路径的优点:容错能力强、算法易实现、载荷较平衡、总带宽较大。
节点不相交路径的缺点:能量效率低、路径数量少。
链路不相交路径的优点:能量效率高、路径数量多。
链路不相交路径的缺点:容错能力差、算法不易实现、载荷相对不平衡、总带宽较小。

缠绕多路径路由:也称作部分不相交路径或最大不相交路径。不要求是完全不相交的,缠绕多路径是在建立主路径后,在主路径的附近寻找备用路径以提供较强的路径备份能力。
缠绕多路径的优点:路径数量多、负载较均衡、提高系统可靠性。
缠绕多路径的缺点:路径中重叠部分较多,容错能力较差。
⑧ Flooding、Mesh、Collect 协议的基本思路,协议适用范围。
Flooding:
一种反应式路由。当源节点有数据需要传输时直接广播,网络中每个节点接收到新的数据报都转发一次。
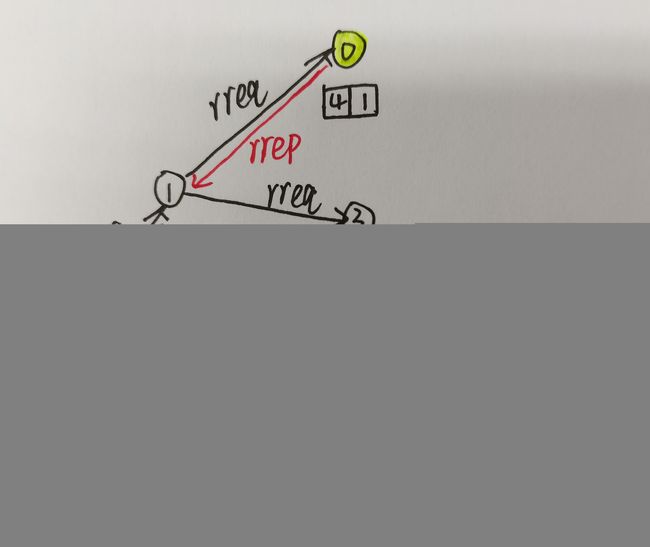
Mesh:
一种反应式路由。当源节点 S 有数据包需要发送给目的节点 D 时,S 首先全网洪范Route Request(rreq)控制包,其中包含 S 和 D 的地址信息。
每个节点收到 rreq 后:
step1:更新路由表,将发送节点的地址加入路由表,将发送节点设为到达 S 的 next-hop。
step2:若接收节点是 D,则返回 Route Reply(rrep)控制包,其中包含 S 的地址信息。
每个节点收到 rrep 后:
step1:直接将 rrep 转发给路由表中的 next-hop,更新路由表,将发送节点设为到达 D 的 next-hop。
step2:如果接收节点是 S,则说明寻路成功,准备发送数据。通过查找到达 D 的 next-hop,多跳路由即可到达 D。
Collect:
一种主动式路由。在网络初始化时即建立以 Sink 节点为根的树状路由结构,并周期性地进行维护。节点有数据发送时则直接沿着树状结构转发即可。
初始状态:
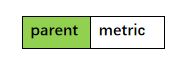
每个节点 d 的父节点 p=null, metric(d)=Inf
[ 说明:metric 是一种度量,Inf 是 ∞,上图是 Collect 的路由表项 ]
路由建立过程:
sink 节点发起路由建立,发送广播 ADV,其中包含 metric(sink) ,metric(sink)设为 0。每个节点 d 收到 s 发来的ADV后都将比较并进行更新,如果 metric(s) + metric(s,d)< metric(d),则更新 p=s, metric(d)=metric(s) + metric(s,d),并广播最新的ADV包含metric(d)。最终所有节点都会维持一个父节点和 metric。
协议适用范围:
Flooding、Mesh 是反应式路由:数据流量小、移动性强、实时性要求不高。
Collect 是主动式路由:数据流量大、移动性较小、实时性要求较高。
传输层和应用层
① PSFQ 的实现过程是什么?
适用范围:单个 sink 向一组接收节点或网络中所有节点传输数据(例如全网络范围更新指令)。
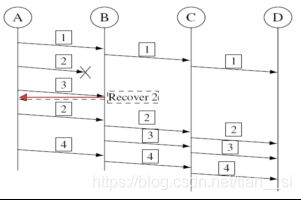
PSFQ 采用缓发快取的方式进行传输控制,由 pump、fetch 和 report 三种操作构成。
pump 是指 sink 给数据块中的数据段分配序列号,并利用 MAC 层广播按顺序发送。相邻数据段的发送保持一定时间间隔,可以保障数据段有一定的缓存时间以备重传。fetch 指节点收到顺序错误的新数据段时暂停数据转发,向上游节点发送 NACK 请求重传丢失的数据段,待收到丢失数据段后再顺序转发。 report 操作是 sink 要求距离较远的节点逐跳汇报自己的地址和收包情况,据此判断指令的分发情况。
② 拥塞的指标有哪些?拥塞缓解的主要方法有哪些?
------------------拥塞检测------------------
基于信道采样:若监测到信道长时间处于忙碌状态,则认为发生拥塞。
基于缓冲区占用率:缓冲区存储超过某一阈值,预测拥塞即将发生。
基于丢包率:若丢包过于频繁则判断有拥塞。
基于负载强度:综合考虑局部区域的流量负载情况和信道竞争状况,若负载强度过大则认为有拥塞。
基于包间隔/包服务时间:若从邻居节点收到的数据分组到达的时间间隔,以及从到达缓存区到被发送出去的服务时间过长则判断有拥塞。
基于数据逼真度:通常由汇聚节点执行检测,若收集到的信息准确度过低则判断网络拥塞。
------------------拥塞缓解------------------
速率调节:调整源节点产生数据或中间节点转发数据的速率。
流量调度:通过绕路、分流或重定向等方式减小拥塞区域的数据流,缓解拥塞。通常与多路径路由协议相结合。
数据处理:传感器节点可以根据应用对数据进行丢弃、压缩或融合,减小数据量。
③ 可靠性保障机制有哪些?
丢包恢复:丢包检测和反馈(ACK / NACK / IACK)+ 重传恢复。
速率调节:基于任务调节源速率。
冗余传输:发送节点多次发送同一数据包的拷贝,接收节点只要收到至少一个数据包即可。
支撑技术
① 传感器网络为什么要实现时间同步?
应用需要:
CSMA 需要时间同步;SMAC 要求节点同睡同醒;TRAMA 划分时隙也需要时间同步;测距 ToA 要求收发双方时间同步;某些目标跟踪应用等都需要时间同步。
计算机时钟很不准:
一个计算机时钟由一个电子设备生成,这种设备计算在某个频率下一个石英晶体的震荡数。每个晶体振荡器的频率本身存在偏差,同时又容易受到湿度、电磁波干扰等影响。
② 时间 / 时钟、时钟漂移等概念。
对于一个传感器节点 p 来说:
时间:p 时钟报告的时间。可以表示为一个函数 Cp(t),t 为标准时间。Cp(t) = t 表示一个标准时间。
时钟偏移:时钟报告的时间与真实时间的差值, Cp(t) - t。
时钟频率:时钟计数的速率,Cp '(t)。
时钟频差:石英晶体震荡频率与标准时钟的差值 Cp '(t) - 1。
时钟漂移:时钟值相对实际时间偏差的二阶导数Cp "(t) 。
③ 如何理解传输延迟的不确定性给时间同步带来的挑战。
时间同步思路:节点 A 发送包含自己时间 Ta 的同步包给节点 B,节点 B 收到以后直接调整自己的时间为 Tb,实现同步。但是这种思路因为不确定因素有很多,所以面临一些挑战。
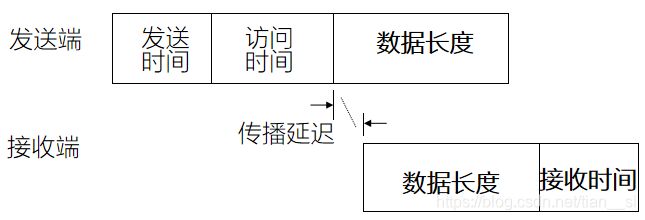
发送时间不确定:发送时间是发送节点构造并发送时间同步消息所用的时间。这段时间长短依赖于处理器负载、操作系统的系统调用开销等,具有不确定性。
访问时间不确定:访问时间是发送节点等待访问信道的时间。这段时间长短依赖于信道负载,具有不确定性。
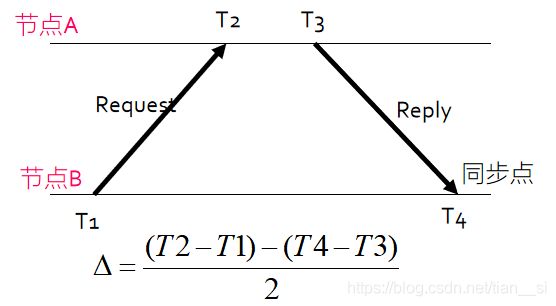
④ 掌握TPSN时间同步协议是如何进行同步的。
节点 B 想与节点 A 同步,则:
节点 B 发送同步请求并记录发送时间 T1
节点 A 记录接收时间 T2 ,并在 T3 时间返回回复消息
节点 B 记录接收时间 T4 并同步,设置本地时间为 T4 + Δ
⑤ 掌握基于测距的定位算法工作机制,掌握 ToA、TDoA 、ToF 测距的原理和优缺点,掌握计算距离方法。
ToA:
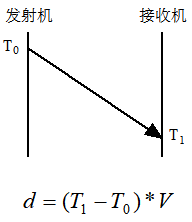
优点:实现简单。
缺点:需要严格的时间同步。
TDoA:
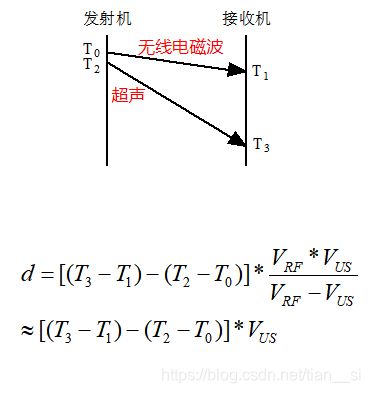

优点:不需时间同步,测距较精准。
缺点:需要两套收发设备,成本高。
ToF:

优点:不需要时间同步,测距较精准。
缺点:需要往返通信,功耗高、续航时间短。
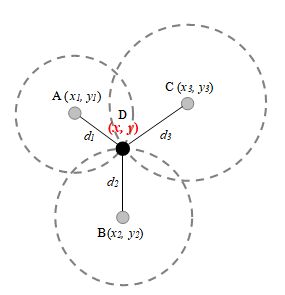
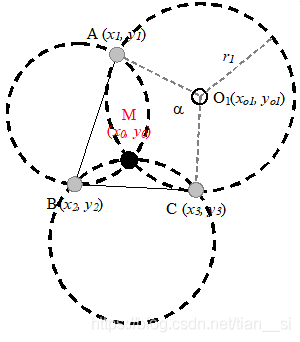
⑥ 掌握三边定位、多边定位的原理并进行计算。
三边定位原理:

逆矩阵求法:
step1:余子式、代数余子式

step2:行列式
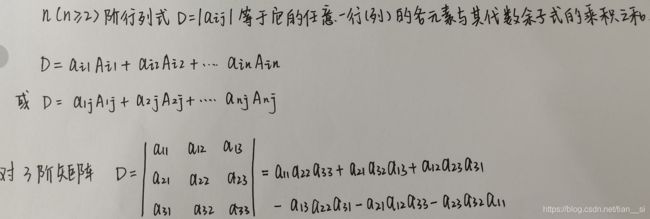
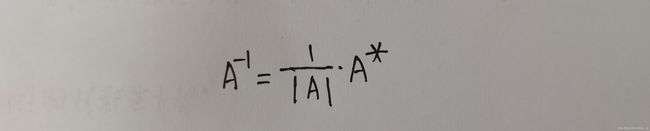
step3:伴随矩阵

step4:逆矩阵
例题:
信标节点A、B、C的坐标为(0,0)、(20, 20)、(20, 0)。未知节点距离他们的距离分别为14.14、14.14和14.14,求未知节点的坐标。
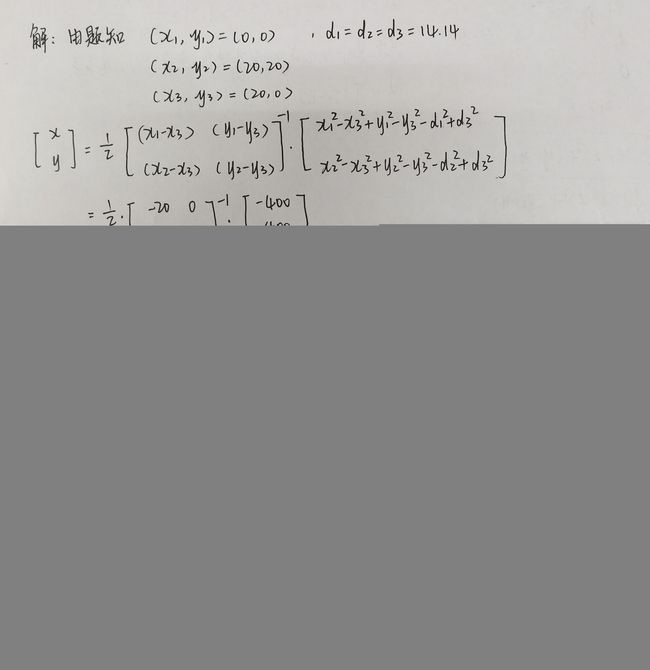
多边定位同理。
⑦ 掌握三角定位的原理,不要求计算。
⑧ 掌握 DV-Hop 算法的定位实现过程和优缺点。

定位实现过程:
step1:计算未知节点与信标节点之间的最小跳数;
step2:估算每跳的平均距离,利用最小跳数乘以平均每跳距离,得到未知节点与信标节点之间的估计距离;
step3:利用三边测量法或极大似然估计法计算未知节点的坐标。
优点:采用平均每跳距离来估算实际距离,不需测距、实现简单。
缺点:利用跳段距离代替直线距离,存在一定的误差。
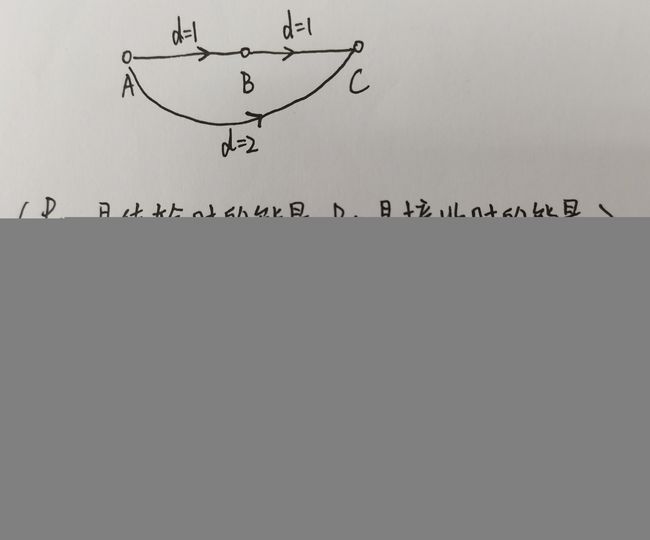
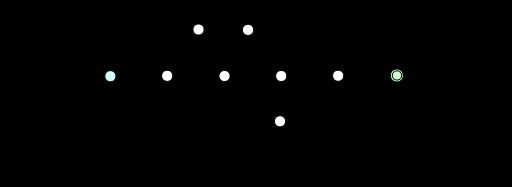
例题:给定上图,L2 负责计算每跳平均距离,求 A 的坐标。
信标节点 L2 计算的每跳平均距离为 (40+75)/(2+5) =16.42,A 从 L2 获得每跳平均距离,则节点 A 与三个信标节点之间的距离分别为 d1=3×16.42,d2=2×16.42,d3=3×16.42。若知道 L1、L2、L3 的坐标,那么就可以根据三边定位的方法求出 A 的坐标。