树莓派ROS机器人
ROS机器人总结笔记
- 连接树莓派
- 修改IP地址
- 开启底盘节点
- 校准IMU
- 调用键盘:
- 角速度校正
- 鼠标构建地图
- 保存地图
- 自动导航与自动避障
- 使用Hector算法构建地图(会有重影,不适合障碍物多的地方)
- >动态调节PID参数
- 摄像头寻线 与雷达跟随
- 多点导航
- APP连接
- opencv_apps图像事例
- APP建图
ifconfig Linux查看IP
ipconfig Windows查看IP
连接树莓派
ssh clbrobot@IP地址
修改IP地址
如若更换IP,必须修改
sudo gedit ~/.bashrc // 修改IP地址一致
source ~/.bashrc

开启底盘节点
clbrobot@clbrobt:~roslaunch clbrobot bringup.launch
校准IMU
重新打开控制台连接树莓派
- roscd clbrobot/
- clbrobot@clbrobt:~/catkin_ws/src/clbrobot_project/clbrobot$ cd param/imu
//校准X,Y,Z方向 - clbrobot@clbrobt:~/catkin_ws/src/clbrobot_project/clbrobot/param/imu$ rosrun imu_calib do_calib
- rostopic echo /imu/data
调用键盘:
指令
I 前进
J 左转
L 右转
M 左后退
< 后退
> 右后退
U 左前
O 右前
C 角速度
X 线速度
1.连接树莓派 ssh clbrobot@IP地址
2.开启底盘节点: clbrobot@clbrobt:~roslaunch clbrobot bringup.launch
3.新开终端,并连接树莓派
4.clbrobot@clbrobt:~$ rosrun teleop_twist_keyboard teleop_twist_keyboard.py
角速度校正
1.连接树莓派 ssh clbrobot@IP地址
2.启动底盘节点:clbrobot@clbrobt:~roslaunch clbrobot bringup.launch
3.新开终端,连接树莓派,启动底盘节点
4.clbrobot@clbrobt:~$ rosrun rikirobot_nav calibrate_angular.py
5,新开终端
6.CLB@CLB:~$ rosrun rqt_reconfigure rqt_reconfigure
鼠标构建地图
1.连接树莓派
2.启动底盘节点
3.新建终端,连接树莓派
4.开启雷达 clbrobot@clbrobt:~$ roslaunch clbrobot lidar_slam.launch
5.新建终端 rosrun rviz rviz
6.选择slam.rviz文件open
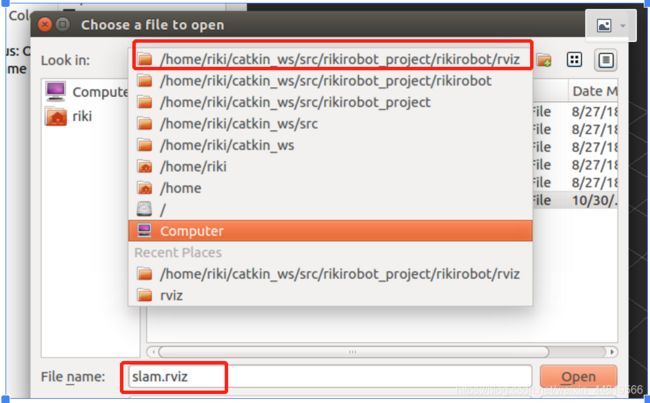
7.调用键盘控制小车移动CLB@CLB:~$ rosrun teleop_twist_keyboard teleop_twist_keyboard.py
保存地图
1.连接树莓派
2.打开obot@clbrobt:~$ roscd clbrobot/
3.brobot@clbrobt:~/catkin_ws/src/clbrobot_project/clbrobot$ cd maps
4.lbrobot@clbrobt:~/catkin_ws/src/clbrobot_project/clbrobot/maps$ ./map.sh
自动导航与自动避障
1.连接树莓派
2.启动底盘
3.创建新终端,连接树莓派
4.clbrobot@clbrobt:~$ roslaunch clbrobot navigate.launch
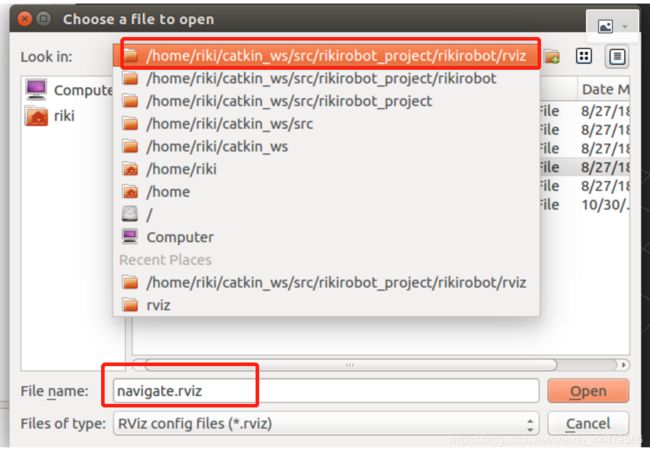
5.新终端输入 CLB@CLB:~$ rosrun rviz rviz
6.打开navigate.rviz
使用Hector算法构建地图(会有重影,不适合障碍物多的地方)
1.连接树莓派
2.开启底盘
3.新建终端,连接树莓派
4.clbrobot@clbrobt:~$ roslaunch clbrobot hector_slam.launch
5.新建终端,rosrun rviz rviz
6.选择slam.rviz

7.调用键盘操控小车
CLB@CLB:~$ rosrun teleop_twist_keyboard teleop_twist_keyboard.py
>动态调节PID参数
1.连接树莓派
2.启动底盘
3.新建终端,连接树莓派
4.clbrobot@clbrobt:~$ rosrun riki_pid pid_configure
5.新开终端:CLB@CLB:~$ rosrun rqt_reconfigure rqt_reconfigure
6.新开终端,开启键盘:CLB@CLB:~$ rosrun teleop_twist_keyboard teleop_twist_keyboard.py
摄像头寻线 与雷达跟随
1.连接树莓派
2.启动底盘
3.新建终端,连接树莓派
4.clbrobot@clbrobt:~$ roslaunch clbrobot camera.launch
5.摄像头寻线:
新建终端:CLB@CLB:~$ roslaunch riki_line_follower riki_line.launch
5.雷达跟随:
新建终端:连接树莓派
clbrobot@clbrobt:~$ roslaunch riki_lidar_follower laser_follower.launch
多点导航
1.连接树莓派
2.启动底盘
3.新建终端,连接树莓派
4.多点导航clbrobot@clbrobt:~$ roslaunch clbrobot navigate_multi.launch
5.新建终端, rosrun rviz rviz
会提示报错,这个不用管(个别电脑会导致虚拟机崩溃掉,建议换台电脑):

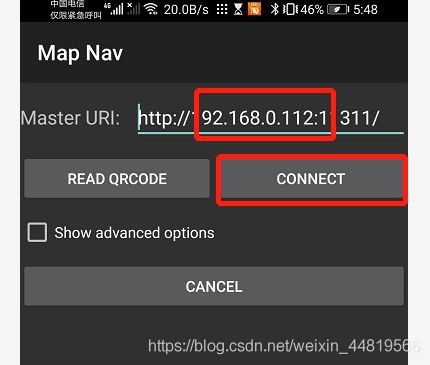
APP连接
1.连接树莓派
2.启动底盘
3.新建终端,连接树莓派
4.clbrobot@clbrobt:~$ roslaunch clbrobot appcamera.launch
打开树莓派自带APP,输入IP地址,点击connnect
(自带的树莓派我打开APP会崩溃,我在网上找的博客下载的)

opencv_apps图像事例
1.连接树莓派
2.开启摄像头:clbrobot@clbrobt:~$ roslaunch clbrobot camera.launch
3.新建终端:
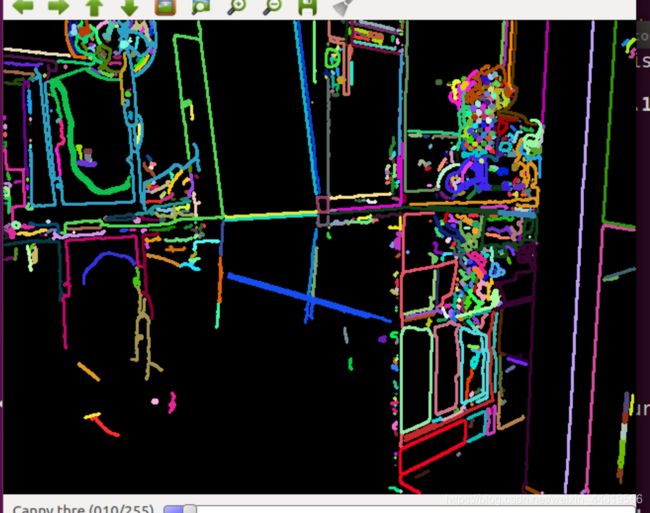
4.边缘提取:
CLB@CLB:~$ roslaunch opencv_apps edge_detection.launch

4,直线检测:
CLB@CLB:~$ roslaunch opencv_apps hough_lines.launch

4.结构特征轮廓
CLB@CLB:~$ roslaunch opencv_apps find_contours.launch
4.凸高检测
CLB@CLB:~$ roslaunch opencv_apps convex_hull.launch
4.椭圆形轮廓识别
CLB@CLB:~$ roslaunch opencv_apps general_contours.launch

4.身高识别
CLB@CLB:~$ roslaunch opencv_apps people_detect.launch

这只是举例,还有很多,大家多多尝试吧!
APP建图
1.连接树莓派
2.连接底盘
3.新建树莓派,连接树莓派
4.启动雷达:clbrobot@clbrobt:~$ roslaunch clbrobot lidar_slam.launch
5.新建树莓派,连接树莓派
6.启动摄像头clbrobot@clbrobt:~$ roslaunch clbrobot camera.launch
7.打开树莓派自带APP,输入IP地址连接