ROS Qt5 librviz人机交互界面开发三(实现控制机器人速度与方向)
本系列教程文章专栏:
ROS机器人GUI程序开发
本系列课程已上线古月学院,欢迎感兴趣的小伙伴订阅:
- ROS Qt开发环境搭建以及基础知识介绍
- ROS人机交互软件的界面开发
- ROS Rviz组件开发方法

开发交流QQ群: 797497206
完整项目代码:
github
文章目录
-
- 一,首先在ui界面添加按钮(注意按钮上显示的文字):
- 二,关联这些按钮的点击事件到同一槽函数
- 三,完整开源项目
- (转载请注明作者和出处:https://blog.csdn.net/qq_38441692 未经允许请勿用于商业用途)
我这里主要就是参考
teleop_twist_keyboard项目的源代码,移植到自己程序
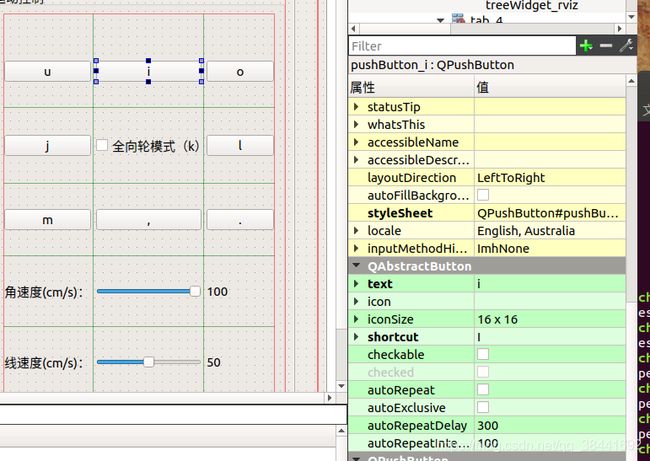
一,首先在ui界面添加按钮(注意按钮上显示的文字):
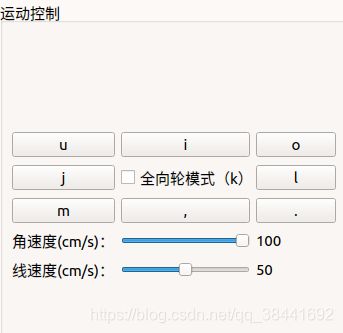

同时在ui界面设置每个按钮的shortcut,就能实现键盘控制:
二,关联这些按钮的点击事件到同一槽函数
//绑定速度控制按钮
connect(ui.pushButton_i,SIGNAL(clicked()),this,SLOT(slot_cmd_control()));
connect(ui.pushButton_u,SIGNAL(clicked()),this,SLOT(slot_cmd_control()));
connect(ui.pushButton_o,SIGNAL(clicked()),this,SLOT(slot_cmd_control()));
connect(ui.pushButton_j,SIGNAL(clicked()),this,SLOT(slot_cmd_control()));
connect(ui.pushButton_l,SIGNAL(clicked()),this,SLOT(slot_cmd_control()));
connect(ui.pushButton_m,SIGNAL(clicked()),this,SLOT(slot_cmd_control()));
connect(ui.pushButton_back,SIGNAL(clicked()),this,SLOT(slot_cmd_control()));
connect(ui.pushButton_backr,SIGNAL(clicked()),this,SLOT(slot_cmd_control()));
槽函数:
//速度控制相关按钮处理槽函数
void MainWindow::slot_cmd_control()
{
QPushButton* btn=qobject_cast<QPushButton*>(sender());
char key=btn->text().toStdString()[0];
//速度
float liner=ui.horizontalSlider_linear->value()*0.01;
float turn=ui.horizontalSlider_raw->value()*0.01;
bool is_all=ui.checkBox_use_all->isChecked();
switch (key) {
case 'u':
qnode.move_base(is_all?'U':'u',liner,turn);
break;
case 'i':
qnode.move_base(is_all?'I':'i',liner,turn);
break;
case 'o':
qnode.move_base(is_all?'O':'o',liner,turn);
break;
case 'j':
qnode.move_base(is_all?'J':'j',liner,turn);
break;
case 'l':
qnode.move_base(is_all?'L':'l',liner,turn);
break;
case 'm':
qnode.move_base(is_all?'M':'m',liner,turn);
break;
case ',':
qnode.move_base(is_all?'<':',',liner,turn);
break;
case '.':
qnode.move_base(is_all?'>':'.',liner,turn);
break;
}
}
创建发布者:
//速度控制话题
cmd_pub = n.advertise<geometry_msgs::Twist>("cmd_vel", 1);
qnode.move_base:
//发布机器人速度控制
void QNode::move_base(char k,float speed_linear,float speed_trun)
{
std::map<char, std::vector<float>> moveBindings
{
{
'i', {
1, 0, 0, 0}},
{
'o', {
1, 0, 0, -1}},
{
'j', {
0, 0, 0, 1}},
{
'l', {
0, 0, 0, -1}},
{
'u', {
1, 0, 0, 1}},
{
',', {
-1, 0, 0, 0}},
{
'.', {
-1, 0, 0, 1}},
{
'm', {
-1, 0, 0, -1}},
{
'O', {
1, -1, 0, 0}},
{
'I', {
1, 0, 0, 0}},
{
'J', {
0, 1, 0, 0}},
{
'L', {
0, -1, 0, 0}},
{
'U', {
1, 1, 0, 0}},
{
'<', {
-1, 0, 0, 0}},
{
'>', {
-1, -1, 0, 0}},
{
'M', {
-1, 1, 0, 0}},
{
't', {
0, 0, 1, 0}},
{
'b', {
0, 0, -1, 0}},
{
'k', {
0, 0, 0, 0}},
{
'K', {
0, 0, 0, 0}}
};
char key=k;
//计算是往哪个方向
float x = moveBindings[key][0];
float y = moveBindings[key][1];
float z = moveBindings[key][2];
float th = moveBindings[key][3];
//计算线速度和角速度
float speed = speed_linear;
float turn = speed_trun;
// Update the Twist message
geometry_msgs::Twist twist;
twist.linear.x = x * speed;
twist.linear.y = y * speed;
twist.linear.z = z * speed;
twist.angular.x = 0;
twist.angular.y = 0;
twist.angular.z = th * turn;
// Publish it and resolve any remaining callbacks
cmd_pub.publish(twist);
ros::spinOnce();
}
三,完整开源项目
在我自己学习的过程中目前发现没有相关类似完整开源项目,为了帮助其他人少走弯路,我决定将自己的完整项目开源:
github
创作不易,如果本教程对你有帮助,关注或点个赞吧,或者github标个星哦~~
您的支持就是我最大的动力~