记录robosense16多线雷达配置过程
这是本人第一篇csdn。白嫖了那么久的博客,今天终于下定决心开始写博客了哈~
话不多说,上教程。
robosense16应该是最基础最常用的3D雷达了,正好师兄手里有一个,就拿来玩玩。
这个雷达和rplidar相比最大的不同就是是通过网线连接的,而不是通过两根usb口。所以接线方面需要看清楚。
- 准备工作
- 一个robosense16
- ubuntu16.04(这个是目前最稳定资料最多的版本了)
- 有一定的rplidar建图导航基础(2d雷达至少会吧)
- 安装驱动源码
mkdir -p ~/catkin_ws/src
git clone https://github.com/RoboSense-LiDAR/ros_rslidar- 安装libpcap-dev(某个依赖项,装了就行)
sudo apt-get install libpcap-dev- 更改源码属性
cd ~/catkin_ws/src/ros_rslidar/rslidar_drvier
chmod 777 cfg/*
cd ~/catkin_ws/src/ros_rslidar/rslidar_pointcloud
chmod 777 cfg/*- catkin make
cd ~/catkin_ws
catkin_make做完以上几步应该是不会踩坑的,亲测上面的步骤也可以直接在已经建立好的自己的工作空间进行,这相当于安装了一个包,所以只要放在src目录下,就相当于新建了一个有关多线雷达的包,不会产生冲突。

这个是我做好上面步骤之后的样子,主要的代码就保存在ros_rslidar文件夹中。很方便,rslidar和rplidar就差一个字母,感觉倍感亲切有没有。
- 将自己的工控机与雷达连接,修改ip
这里有个大坑,先说操作吧。按照网上的教程,这一步应该是直接修改即可。
但是每个人的网口的名字都是不一样的,比如我的就不是默认值,所以根据网上的方案修改会报错。
这里讲一下如何调试和如何看自己的指令。先贴自己的单次修改ip地址的方法:
将本地ip地址改为192.168.1.102,子网掩码设置为255.255.255.0
sudo ifconfig enp3s0 192.168.1.102 netmask 255.255.255.0这里需要注意的是需要sudo,其次是enp3s0是本人的工控机的网口名字,每个人的应该都不是完全相同。查看方法很简单,ifconfig一下即可。
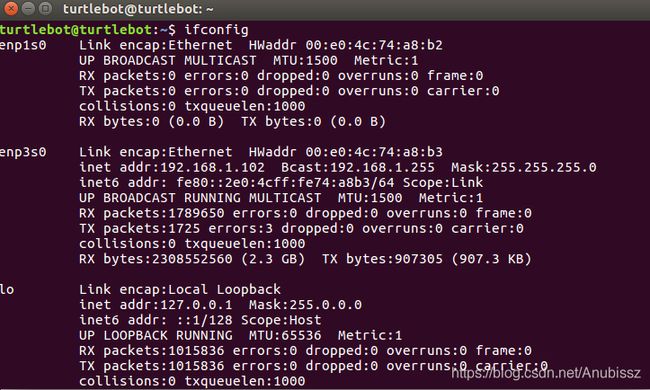
其实下面还有,就不截全了。如果没有经验的话,可能要多次尝试一下。将左边的enp1s0 enp3s0甚至lo之类的,每个都尝试一下,就可以了。
- 测试
cd ~/catkin_ws
source devel/setup.bash
roslaunch rslidar_pointcloud rs_lidar_16.launch
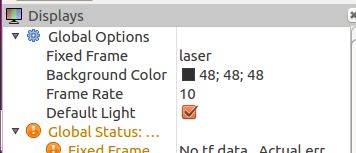
如果没有出现这样的漂亮的多线雷达画面,有以下几个检查步骤,首先是检查fix frame 是否为rslidar 或者laser (本人已经把雷达节点的frameid改成laser了,所以是以上两者之一。在我的rviz上,需要设置为laser,如果下拉框里没有laser,可以选择手敲试试。
其次也需要检查一下你的雷达是否连上了。因为每个人的电脑or工控机的网口应该不止一个,所以你可能接到了没有连雷达的网口上,或者你跳过了我设置ip的步骤。因为在本人工控机上,截不到右上角的网络信息,所以给大家看一下检测过程吧。
直接点开右上角的网络![]()
就这个,看一下有没有明显的连上了你的雷达网络。
这里有一步source,相信能看到这篇博文的小伙伴应该很熟悉了,大家记得自己放到.bashrc中,然后就可以一劳永逸了。
这里的rs_lidar_16是一个demo,功能就是开多线雷达,并且打开一个rviz。
如果自己写一个launch包含本文件的话,需要把这里的rviz注释掉,不然会开启多个rviz报错。(虽然比较蠢,但是本人的经验之谈啊)