基于PS2手柄的Arduino遥控小车
前言
本文利用PS2手柄和Arduino开发板制作了一个简易的遥控小车,利用蓝牙进行通信,可以实现前后左右的移动。(原理掌握之后可以自己拓展相关功能)
一、零件
1.Arduino UNO开发板:
ArduinoUNO是ArduinoUSB接口系列的最新版本,作为Arduino平台的参考标准模板。UNO的处理器核心是ATmega328,同时具有14路数字输入/输出口(其中6路可作为PWM输出),6路模拟输入,一个16MHz晶体振荡器,一个USB口,一个电源插座,一个ICSPheader和一个复位按钮。

2.PS2手柄与接收器:
PS2 手柄由手柄与接收器两部分组成,手柄主要负责发送按键信息;接收器与单片机相连,用于接收手柄发来的信息,并传递给单片机,单片机也可通过接收器,向手柄发送命令,配置手柄的发送模式。

接收器的引脚功能如下图所示:

特别需要提醒的是:按下遥控器的 MODE 键,手柄可配置成“红灯模式”或者“绿灯模式”,当遥控器侧面的 “MODE LED”亮为红灯模式,反之为绿灯模式,“红灯模式”和“绿灯模式”的主要区别是摇杆模拟值得输出。
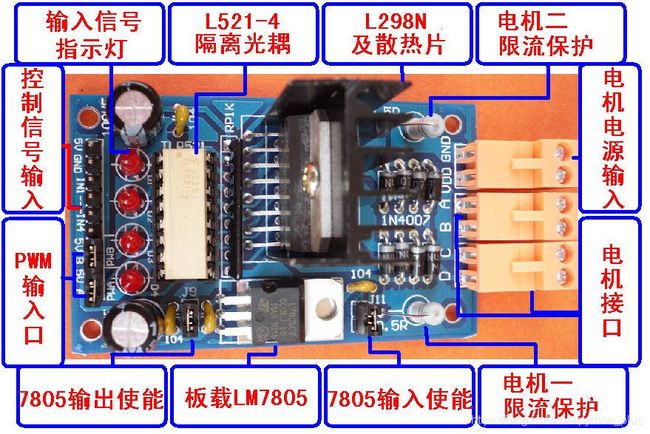
3.L298N驱动模块:
L298N,是一款接受高电压的电机驱动器,直流电机和步进电机都可以驱动。一片驱动芯片可同时控制两个直流减速电机做不同动作,在6V到46V的电压范围内,提供2安培的电流,并且具有过热自断和反馈检测功能。L298N可对电机进行直接控制,通过主控芯片的I/O输入对其控制电平进行设定,就可为电机进行正转反转驱动,操作简单、稳定性好,可以满足直流电机的大电流驱动条件。
4.面包板
面包板是由于板子上有很多小插孔,专为电子电路的无焊接实验设计制造的。由于各种电子元器件可根据需要随意插入或拔出,免去了焊接,节省了电路的组装时间,而且元件可以重复使用,所以非常适合电子电路的组装、调试和训练。

5.小车
由亚克力板、直流电机、小轮胎、电池盒、电池等搭建的小车。

二、代码
#include