self_drive car_学习笔记--第11课:控制理论
前言:这节课,主要介绍了无人车里面基本控制理论,然后介绍常用基本级控制器PID,也介绍以下进阶版本控制器,最后介绍一下matlab里面的控制工具箱。很菜现在,有些理解错误地方,还望大大们不吝赐教。觉得写得还行,麻烦赏个赞哈。好了,不瞎扯了,开始主题。
概要
1控制理论基础
2 PID控制器
3进阶控制器设计
4 MATLAB控制工具箱
1 控制理论基础
1.1 control基本介绍
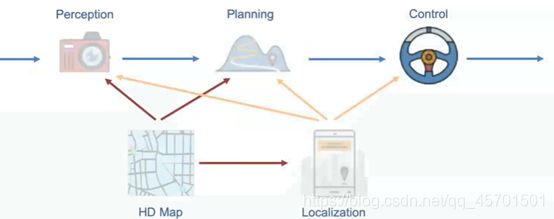
【control目前,起到接管与自动驾驶转换的关键点;control直接与车协议沟通的,图中其他模块没有这种功能】【图中没有显示的就是,HD map对控制也有一定的作用】【control从planning接收轨迹参考信息,从localization接收自身定位信息,从HD Map接收周围环境信息,以及从图中没有显示的车底盘获取反馈信息,综合处理上述信息后,输出油门、刹车、方向盘信息】
1.2control控制模块
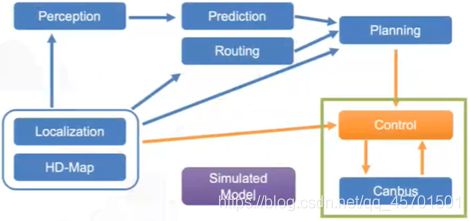
【淡茶绿色方框内的canbus,其是一个控制和车辆底层紧密相关的模块;在canbus设置好相应的协议,control根据协议发送指令,实现对车辆的控制】
1)输入:
----轨迹线reference【速度、加速度、位置】
----定位信息【自身位置状态】
----地图信息【环境信息,自身在环境位置信息】
----车辆反馈信息
2)输出:
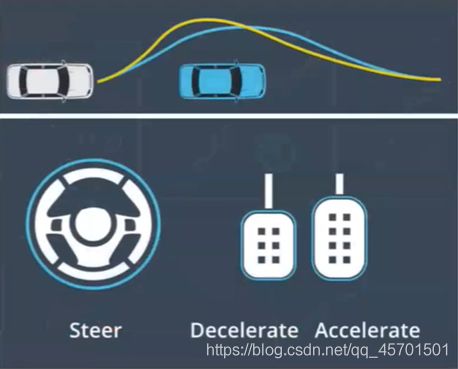
油门、刹车、方向盘
3)canbus:车辆底盘交互协议(由车厂决定)
----Chassis(底盘)
----速度、四轮转速
----底盘健康状况
----底盘报错
----自动驾驶状态
4)仿真:
----运动学模型【车,根据轨迹以及运动方向,判断该车下一时刻会出现在哪里】
----动力学模型【车,在整个环境中的受力情况,包括干扰、风力、摩擦系数等造成的力学信息】
1.3 control控制任务
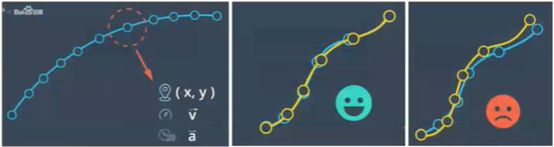

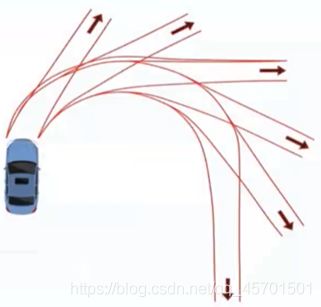
【上图左,表示轨迹点有位置、速度、加速度信息;上图中表示比较好的control,因为基本符合planning要求;上图右control就是比较差的,因为偏离planning越来越大,发散型control是危险的】
【下图左1,橙红色控制轨迹不合理的;下图左2控制轨迹也是不合理的,图中的三个点距离非常短,表示速度减少非常快,属于急刹,舒适性没有保证;下图左3的控制轨迹也是不合理的,因为其是严重摇摆影响舒适性,没有把累计的误差保证在一定范围导致严重摇摆的发生,业界称之为画龙现象(可能planning给的轨迹正常,但是control没有跟上,导致摇摆发生);下图左4的控制轨迹基本合理】
1)【跟踪好】Planning的轨迹信息
2)不同环境下的轨迹跟踪
----雨雪、陡坡、石头路【这些细微因素使得轨迹跟踪变得不简单;由于planning并不会对这些信息进行处理,只是control来处理】
3)保证车辆可行性
4)保证车辆舒适性
5)实时性要求高(100Hz)【跟定位实时性要求一个级别,要求非常高】【对应时间复杂度比较高的算法,也就是运行时间比较长的算法,并不适合在control使用】
6)控制重要的原因:
----控制是对车辆油门、刹车、方向盘的精细控制
----是安全行驶的最后关卡
----克服外界各种不确定性环境因素(风速、湿滑)
7)控制模块:让车辆在既定轨迹上平稳运行的学问
控制问题很复杂,是一套严格的数学分支,本课程以下原则介绍控制:
----简化问题
----重点介绍概念性知识
----少用数学公式(推理、证明)
1.4 控制模块细分

1)预处理
----数据清洗:不正常信号、planning异常值【对于异常数据,去除或者报错】
----合理性检查:定位信息、车辆底盘信号
----紧急处理:前方突然出现障碍物(emergency stop)【例如无人车前侧安装的超声传感器,直接连接到control模块,应付紧急障碍物】
----信号smooth:去除信号噪声【传感器的信号都是带有噪声】,lag Compensation【滞后信号补偿,这是由于信号传递过程中,信号传递过程中有些滞后,需要做一些补偿,消除一些传递误差】
2)后处理
----saturation/limitation处理:执行器的固有缺陷补偿【由于执行器本身有能力限制,所以需要对输出信号做一定的限制,否则输出的信号有可能直接导致底盘报错或者执行器破坏】
----型号smoothing:简单的平滑处理和异常检查
3)control控制器设计:
----建模【建立一个车辆模型,目的提供一个控制对象】
----系统参数辨识【控制可修复一些细微细小的错误,而这些错误对应的值是无法精确得到,这时候就需要系统辨识,利用一些方法,猜算出这些值也就是对应的系统参数】
----控制观测器设计【观测器,指的是有些控制方法在反馈的基础上,要添加更多观测信息,才能确定其反馈值是否符合控制输入;控制观测器可理解为整个控制器的一套方法;其设计非常重要,决定控制器性能】
----参数Fine Tuning【参数调节,与深度学习的超参的调差方式(一般是试验试错方式)不一样,而其一般是依据一些数学原理对参数调整进行指导,但也有试错试验方式来调整的】
1.5 控制被需要的原因
1)控制系统:消除数学模型和物理模型差异性的过程
【现实中的物理结构受很多复杂性因素影响,不能直接运行完美的数学结果;完美的数学结果与复杂的物理结构如何达到一个匹配,就是通过控制系统;控制系统就是缩小数学模型与物理模型的误差】【任何机械任务,数学模型看上去都是很美好的,但到机器层就会出现很多问题】
2)对于无人车:
----stability:稳定性,对于任何环境都需要稳定(安全)【稳定是安全的前提】
----稳态误差:尽可能小,保证执行上层命令【控制实际运行的偏差范围】
----动态误差:在动态工程中也需要保证很多性能
【上述的说的左右摇摆的画龙现象就是动态误差较大情况;特别在乘用车上,动态误差要求更高(舒适性要求高),而且比较难,因为其需要一些比较复杂的东西才能保证动态误差】
参考 J Doyle,Feedback Control Theory【http://static.gest.unipd.it/~oboe/psc/testi/dft.pdf】
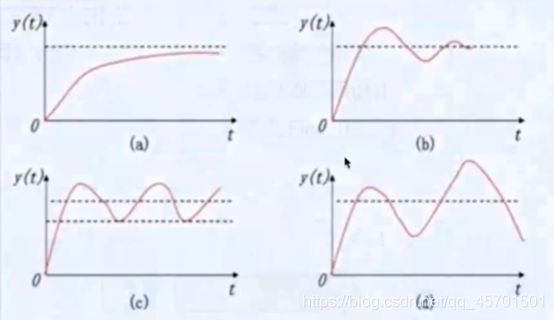
【y(t)表示控制系统的输出;虚线表示控制系统理想状态下达到的位置(我们期望的);t表示时间】【上图中的图(b)就是我们追求的控制系统效果;此外,a到达比较慢,c波动但没有收敛,d波动呈发散属于最不好的控制】
1.6 控制理论基础
参考 J Doyle,Feedback Control Theory 【http://static.gest.unipd.it/~oboe/psc/testi/dft.pdf】
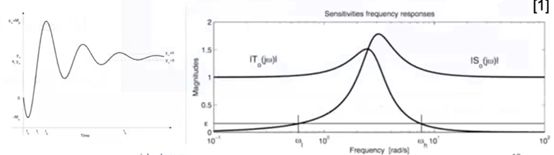
【上左侧用于理解时间域;上右侧用于理解频率域,其横坐标表示频率,纵坐标表示增益】
【上右图中,波峰对应的是一个共振频率】
1)控制系统:
1-1)时间域(time domain)
----超调量:指的是目标值与可达到的最高位置的范围
----超调时间:指到达最高超调量所花时间
----稳态调整时间(整定时间):指的是最初到达稳定在一定范围内所花的时间
----上升时间:指的是初次到达目标位置所花的时间,参与衡量上升速度大小
【一般来说,超调量尽量小;超调时间尽量快;整定时间越快越好;上升时间越快越好】
1-2)频率域(frequency domain)
----通过频率(pass band):通过(增益大于一定程度)对应的频率
----停止频率(stop band):增益下降到一定值所对应的频率
----带宽:增益上升和增益下降对应的频率范围大小
----截至频率:表示增益达到给定的截止值时所对应的频率
【时间域可通过傅里叶或者拉普拉斯变换,变成频率域】
1-3)离散域(z变换)
2)傅里叶变换(FT,FFT)
时域–>频域转换
【傅里叶变换,可以将任何信号转换成使用sin和cos的加权表示的】【任何信号都是可拆分为傅里叶变换】
3)拉普拉斯变换
----时域->频域

4)傅里叶变换(FT,FFT)

----信号–>正弦转换


右侧图参考:https://en.wikipedia.org/wiki/Fourier_series
【上表中,拉氏变换(频域)、时间函数(时域)、Z变换(离散域),三者是可以相互转换;时间函数相对比较常用,Google或百度搜索拉氏变换应该就用了】【右侧图表示的是傅里叶变换,不断叠加】
5)三域小结:
----控制系统三域是可以相互变换的
--------不同领域对特定的需求有不同的解法
---------控制算法也正对不同域有不同优势
---------三域认识,可扩展了人对物理系统的深刻理解
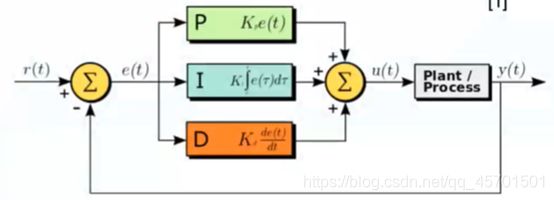
2 PID控制器
2.1 PID基本介绍
参考:Introduction:PID controller design
1)PID:【所有控制系统中】最简单但是应用最广最有效的控制器
2)Model Free
----通用性,任何模型都可以
----【PID属于】反馈控制
----输入可以是速度、位置等
3)PID控制器设计很简单【对系统没有要求,基本上没有什么控制系统,PID是搞不掂的】
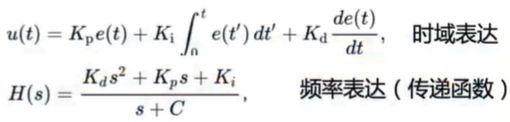
2.2 PID解析
1)P
![]()
1-1)P:proportional比例
----跟误差成正比,误差越大,作用越强
1-2)容易出现震荡,无法收敛
----【我们希望】越靠近目标,应该作用越小,才能稳定
----注意在误差为0时候,控制器的输出也是0


2)D
2-1)D:derivative微分
----阻尼项,减少控制器输出的变化率
2-2)【D控制器】考虑将来误差,计算误差的一阶导,并和一个正常值的常数相乘
----微分控制可以提升整定时间及系统稳定性
【d,适合变化比较快的系统,例如波士顿机械狗底层就是pd控制;如果在变化不快系统使用d,会造成一些尾部的恒定误差,产生一些震荡,尾部很难收敛;由于无人车希望的是慢慢变,尽量平滑,所以d信号使用不多】
3)I

3-1)I:integral积分
----纠正系统累计偏差
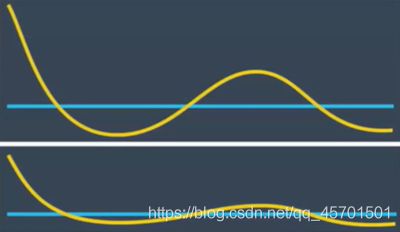
----缩小稳态误差
3-2)【I控制】考虑过去的误差,将误差值过去一段时间和(误差和)乘以一个正值的常数
----积分控制会加速系统趋近设定值的过程,并且消除纯比例控制器会出现的稳态误差

【单纯pd控制时候,容易造成一个恒定(稳态)误差,如上图黄曲线距离直行大小;这时候就需要一个I控制,其可以将稳态误差收敛】
2.3 PID小结
1)PID控制器是世界上【综合性能】最好用的控制器
2)“没有什么是PID解决不了的”
----需要的信息少:当前状态、目标
----无人车使用pid控制方向和加速度基本满足
3)PID是线性控制器【性质决定了其不足】
----【单纯使用pid】复杂系统是不够的:四轴飞行器、多自由度机器人

参考:https://zh.wikipedia.org/wiki/File:PID_Compensation_Animated.gif
 参考Kiam Heong Ang etc. PID Control system analysis,design,and technology,2005
参考Kiam Heong Ang etc. PID Control system analysis,design,and technology,2005
【https://www.researchgate.net/publication/3207704_PID_control_system_analysis_and_design/link/02e7e51a8302235425000000/download】
【PID的调参不是一个简单事情】
2.4 常见PID种类
1)根据控制器输出和执行机构的关系划分:
----位置式PID
----增量式PID
1-1)位置式:输出控制量大小的实际值
1-2)增量式:输出只是控制量的增量
----递推式算法

【上式子为位置式pid;下式为增量式pid】
1-3)无人车应用:
----速度使用的是位置式
----方向盘使用的是位置式
2)串联PID
2-1)PID控制器对单一变量的控制是非常有效的
----无人车可以控制量:速度、加速度、位置、heading
2-2)串联控制作用
----改善控制质量的有效方法
----应对多变量控制和多干扰项
2-3)外环控制器的输出作为内环控制器的设定值
----内环控制器的输出去操纵控制阀

【虚线框表示内环控制器;调参时,先内环再外环】
3 进阶控制器设计
3.1 复杂控制器设计
1)控制任务
----按照planning要求到达目标
----适应不同路况
----适配不同车型
【这就是pid的弊端,在不同的环境,需要重新调参才能获取最佳效果】【这也是无人车难以广泛应用的原因之一】
2)动力学建模
----横向模型和纵向模型
【简单的PID利用的信息不充分,连控制对象是什么都不知道,只是简单利用数学方法来做,所以需要添加更多信息,控制器才能做的更好。因此,这里复杂控制器设计添加了动力学建模】
【纵向模型相对简单,因为车是一般是笔直往前开的,只是加速和减速,存在一些小误差也影响不大,所以相对简单,基本一个PI控制就能够满足基本要求;横向模型,不是指打方向盘的横向,而是要考虑加减速、轮胎转角的横向(这些映射到油门方向盘的控制),在无人车控制里面属于比较复杂而具有挑战性的工作】
3)控制器设计
----横向控制和纵向控制
3.2 车辆模型
1)模型表征一个车辆的物理特性
----单车模型
2)评估每一个控制输入应用于车辆后会发生什么
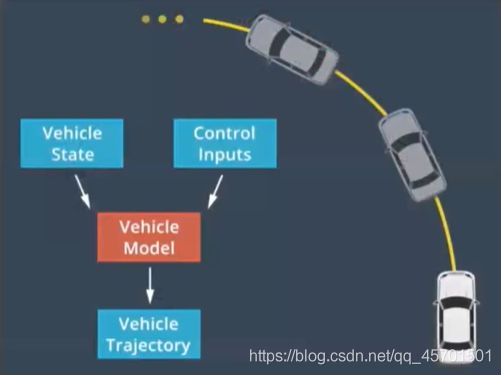
【车状态+控制输入–>车辆模型–>(估计)车辆轨迹】
3.3 单车模型
1)主要物理定律


【牛顿第二定律F=ma;刚体力矩分析,前轮转角稳定也就是转向力矩要一致;后轮转角,其左右转角稳定,符合转向角速度;横向没有侧向位移的,除非打滑】
2)横向动力学

【公式中线性化,抖动角度不大情况下,取cos近似为1简化】
3)小误差模型


【对于xy坐标系做近似会产生较大误差;这里再path坐标系下做的近似】【如果没有做近似的系统,复杂度非常高,基本上没法求解,或者计算量过大导致无法实用】【做近似时,需要一定的合理性】
4)模型表征一个车辆的物理属性
----单车模型
5)评估每一个控制输入应用于车辆后会发生什么
6)横向动力学模型
----heading误差
----横向误差
![]()

【图上方表示的是heading误差例子;下方展示的是横向误差;横向误差需要消除】
7)横向模型推导参考:
http://intheworld.win/2018/11/24/lqr%E4%B8%8E%E6%B1%BD%E8%BD%A6%E6%A8%AA%E5%90%91%E5%8A%A8%E5%8A%9B%E5%AD%A6/
![]()

参考:Rajamani,Vehicle dynamics and control.2011
【式子表示的是简化的横向动力学模型表示,上下两公式可以参数匹对的】
3.4 系统辨识模型
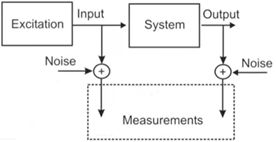
1)存在缘由:系统有些参数是不清楚【比如前轮转角和方向盘转角的实际关系,这时候就需要实验方法来获取】
2)系统辨识:通过实验的方法采集参数
----White Box:汽车大多是白箱辨识
----Black Box:有点像神经网络
----Grey Box
3)Learning-Based 方法【进行系统辨识】
----机器学习
【Apollo目前就应用到一些机器学习方法来做系统辨识,获取不清楚参数】
3.5 最优控制理论

【kalman fiter卡尔曼滤波,在控制领域被称为线性二次估计器】
【LQR,线性二次调节器,最基础的控制方法,好用且成熟,直接代入公式求解就可以了】
【LQE+LQR->LQG,LQG被称为线性二次高斯型】
【LQG+constraint条件限制->LMPC,LMPC线性模型预测控制器】
【LMPC+nonlinearity非线性条件+优化->MPC,MPC模型预测控制】
【整个框图是控制的优化领域概括】
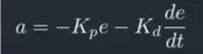
1)optimal control【基本思想】
----给定一个系统和环境扰动
----根据需求条件(Objective)
----实现最优的控制量决策
2)复杂度从左往右递增
【控制最重要的是实时性,结合上图,所以并不是越往右侧控制越好,如果做一些简化能达到实时性的MPC也是可以使用的】
3)精准度从左往右递增
3.6 LQR(线性二次调节器)
1)LQR=linear quadratic regulator
2)基于模型的控制器
----通过车辆状态和模型推理,使得误差最小
----可用于设计横向控制器

3)状态X:
----横向误差及其变化率
----heading误差及其变化率
【横向误差及其变化率、heading误差及其变化率,如图x数组从上到下依次排列】
4)控制量U:
----方向盘(steering)
----油门(throttle)
----刹车(brake)
【如图中u的数组从上到下依次排列】
5)LQR状态方程
----线性等式(L)

【式子中,x表示状态,u表示控制量;状态x就是表示误差,u就是输入;状态与输入之和对时间积分最小就是cost】
【cost写成积分形式,也就是二次型原因是,求解方便,由于误差有正负,平方之和的误差最小才是真正误差最小】
6)尽可能减少误差,同时使用最小输入量U
----可以做到省油、平滑等特性
7)cost函数
----Q和R为正定矩阵
【Q、R表示的是使得两者之和最小,误差以及输入量对应的权重】【Q也可为半正定矩阵】
【R比较大,意味着,更加关注让输入小一些,此时状态衰减会慢一些】
8)最优控制理论的方法求解LQR
8-1)最小cost的解为:u=-Kx 【这个是数学推导得出的】
8-2)其中,K的公式:
![]()
----无人车中使用LQR的N一般为0
8-3)上述公式,P是连续空间中Riccati方程的解:
![]()
【Riccati方程在控制领域比较重要的,使用也比较广泛】
8-4)上述的是LQR的连续空间求解方法,下面是离散空间的表达式:

3.7 MPC(模型预测控制)
1)其是更为复杂控制器
2)基本步骤:
----建立模型
----计算有限时间范围内的最优控制输入
----执行第一组控制输入
【LQR没有时间限制,其累加当前状态下,未来所有环境内,所要达到最优的效果】
3)迭代优化的思想:
----先计算一系列的控制输入并优化该序列输入
----执行第一组控制输入
----循环执行上面两步
【不直接计算所有序列,选择迭代原因是,保证实时性和精确性;模型中做了近似,如果一次性执行所有,会造成很大误差,每次序列优化,选择迭代方式计算可以获取较好效果】
4)LQR VS MPC
----LQR针对固定的时间区间(一般为无限长时间)进行最佳化
----MPC针对不同的时间区间分别进行最佳化
5)时效性vs准确性
【MPC考虑未来时间越长,效果越好,当然耗费时间会越多】
6)【MPC也是一个】搜索问题
----通过车辆动力学模型来减少解空间

7)模型、约束、优化组合【MPC可理解为这三者的结合】

【cost 的求解使用的是QP】
【MPC相对于PID来说,比较精准;并且,MPC可以设定不同的cost,当然对应的计算过程更加复杂】
8)MPC控制流程图

8-1)预测系统
----车辆动力学模型
8-2)滚动优化【表示上流程图的优化方式】
8-3)反馈矫正
【MPC比PID优秀的原因,PID只是针对此刻而没有考虑未来】【比如给定一个轨迹进行实际拟合,PID可能是围着给定轨迹进行类似画龙方式进行拟合;而MPC会考虑综合误差最小方式慢慢拟合,也就是不会一次性拟合过头这些,这就是MPC和PID的拟合核心思想区别之处】

【画龙波浪线表示PID方式拟合;慢慢拟合是MPC方式拟合】
9)MPC车辆误差跟踪状态方程
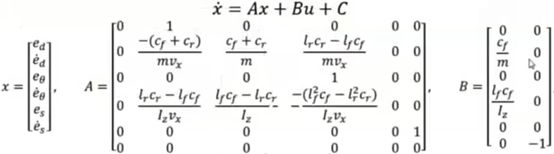
【x矩阵,从上往下看,横向误差及其变化率,heading的角度误差及其变化率?,位置误差及其变化率(位置和速度)】
【A矩阵对应的是一个简化模型获取的】
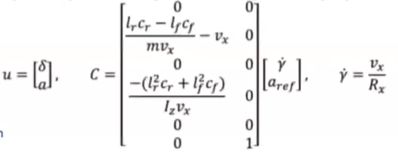
【控制量u矩阵,从上往下,第一个为转向速度(对应方向盘),第二个是加速度(对应油门)】
【C的右侧矩阵,从上往下,第一个参数表示横向角变化率,第二个参数表示加速度参考值】
【MPC是可以不解耦的,包含横、纵向误差,可以直接输出两者的综合者】
9-1)X
----横向误差
----heading误差
----位置误差
----速度误差
9-2)U
----转向角
----加速度
9-3)C(扰动)
----横向角变化率
----加速度参考值
9-4)离散形式
![]()
10)MPC 未来N个周期的状态方程预测

【迭代预测、滚动计算结合】
10-1)目标函数

【目标函数使控制量、控制误差最小】
10-2)约束
![]()
【t 时刻控制量的大小范围;这里也是使用二次规划QP求解】
10-3)二次规划形式

10-4)求解出一组控制序列
![]()
【MPC是比较主要的控制方式,也是最优控制思想】
【控制领域比较成熟,一般利用现成公式以及工具,不需要怎么修改参数就可以了】
4 MATLAB控制工具箱
【matlab是做控制的必备工具;实际控制开发不使用python做的】
4.1 APOLLO控制算法
1)纵向PID控制器
2)横向LQR控制器【实际加了约束,所以更像是LMPC】
3)MPC控制器【其优势是可以处理非线性模型,可以使用QP求解出非线性最优解】
4)Apollo控制源码简单解读
【https://github.com/ApolloAuto/apollo/tree/master/modules/control/controller】
4.2 Matlab控制算法工具箱
1)Matlab
2)Simulink【位于matlab里面的】【下面是一些无人车相关工具箱】
----control system toolbox【控制】
----robust control toolbox【机器人】
----automated driving toolbox【无人车】
----model predictive control toolbox【MPC】
参考:https://ww2.mathworks.cn/?s_tid=gn_logo
https://ww2.mathworks.cn/help/mpc/ug/automated-driving-using-model-predictive-control.html 【MPC工具箱基本介绍】
【matlab官网对这些工具箱介绍非常好,如果想学习的,很有必要看这些官网说明性文件】
3)carsim【这个工具用于商业汽车仿真的,很贵(几百万一套);其建模可以跟车一模一样】
4)https://ww2.mathworks.cn/help/mpc/automated-driving-applications.html
【老师说,把这些案例都搞明白了,进入无人驾驶开发没有问题的,虽然只是针对L2级别的】
5)MPC车道跟随案例
https://ww2.mathworks.cn/help/mpc/ug/lane-following-using-nonlinear-model-predictive-control.html
6)老师强烈推荐的MPC讲解视频
https://ww2.mathworks.cn/help/mpc/getting-started-with-model-predictive-control-toolbox.html
5 文献以及案例推荐
Omead Amidi. Integrated mobile robot control.1990【一本书,介绍机器人建模思路】
【https://pdfs.semanticscholar.org/2453/8d912da84a128f73cb4bca68a31ba8388781.pdf?_ga=2.92043610.1910327742.1611058982-127953921.1611058982】
Goodwin. Control system design.2001【一本书,控制系统设计介绍】
Coding:(optional)
Simulink: Adaptive Cruise Control System Using Model Predictive Control
【https://ww2.mathworks.cn/help/mpc/ug/adaptive-cruise-control-using-model-predictive-controller.html】
Simulink: Lane Following Using Nonlinear Model Predictive Control
【https://ww2.mathworks.cn/help/mpc/ug/lane-following-using-nonlinear-model-predictive-control.html】
答疑环节:
1)pid控制如何进行车辆的横纵向耦合?
答:一般情况下,将无人车系统简化,实现横纵分离,不要耦合
2)PID调参属于玄学,但是还是能够调好的,因为有一些规律的。
3)内外环pid会相互影响,设计时候,内环到外环应是从低维到高维的过程,如内环控制加速度,外环控制速度。再比如无人机,先偏航这些,然后速度这些,最后位置这些,共三层控制。
4)稳定误差,执行机构的终止状态和理想的参数状态不一致。比如方向盘一直有往左偏的误差,即使方向盘打正了,我认为打正了,方向盘应该正常输出,但是总会有一点点左偏。这种情况下,pd控制可能发现不了这个稳定误差,当误差减少到一定程度以后,如果p控制器没有进一步提高控制量的话,会被干扰项或者系统滞后项给过滤掉。因此,出现稳态误差,这个误差会累加到很大,加上I控制器以后,给足够的控制量,从而纠正这个误差。
5)稳定误差,就是系统本身造成的。
6)LQR核心是有了约束
7)控制在无人车里面位置不低,薪资待遇不比视觉这些低
8)强化学习对无人车的决策有用,但是做的难度比较大(老师团队开发经验),研究还行,但是实际使用难度较大,但是这是一个未来方向。
9)无论哪个领域,进入一定深度,都是有难度的
个人小结:这节课,首先介绍了基本的控制理论基础知识,当然也是结合无人车情况进行讲解。接着,介绍了PID控制器,P比例控制,I微分控制,D积分控制,个人理解,这是一个应用很广泛的线性控制器,因此需要解耦,介绍了应用在无人车里面的横向和纵向的引用情况。接着,介绍了比较复杂的控制器设计MPC这些思想啥的。然后,简单介绍了APOLLO的控制器是怎么做的,纵向PID、横向LQR以及MPC这些。最后介绍了matlab跟控制相关的工具箱,当然,重点介绍MPC工具箱,也介绍了两个案例。其实,很多概念这一节。信息量很大。突然感觉,本科时候杨叔子的那本控制论课本应该要好好重新学一下才行。很迷!可能太菜了。
#####################
感恩授课老师的付出
图片版权归原作者所有
不积硅步,无以至千里
好记性不如烂笔头
感觉有点收获的话,麻烦大大们点赞收藏哈