ANO匿名飞控分析(3)— 姿态解算原理及代码分析
- 准备电赛,简单写一下匿名飞控的分析
- 基于TM4C主控的匿名拓空者飞控,介绍见匿名科创–匿名拓空者PRO—TI版全开源飞控使用入门—TM4C123
文章目录
- 一、姿态解算原理相关
-
- 1、简介
- 2、坐标变换和旋转矩阵
- 3、四元数
-
- (1)四元数和欧拉角的关系
- (2)四元数的求解
-
- 1、建立微分方程
- 2、一阶龙格库塔法求解微分方程
- 4、旋转矩阵中的一列
- 二、匿名四轴姿态解算分析
-
- 1、坐标系定义
- 2、坐标系转换
-
- (1)匿名旋转坐标系
- (2)相关代码分析
- 3、IMU_update函数分析
-
- (1)整体分析
- (2)互补滤波原理相关
- (3)互补滤波相关代码分析
- 4、姿态角输出函数函数calculate_RPY()
- 三、参考
- 四、Q&A
-
- (1)讨论1
- (2)讨论2
- (3)讨论3
- (4)讨论4
- (5)讨论5
- (6)讨论6
- (7)讨论7
一、姿态解算原理相关
1、简介
- 对于四旋翼无人机来说,有两个相关坐标系,即地理坐标系 O n X n Y n Z n O_nX_nY_nZ_n OnXnYnZn和机体坐标系 O b X b Y b Z b O_bX_bY_bZ_b ObXbYbZb。
- 姿态角的检测对于四旋翼控制是至关重要的。比如在做飞行器姿态控制的时候,通常使用串级pid的方法,需要得到飞行器姿态角(即欧拉角)来做角度位置环反馈。再如利用装置在机腹垂直向下拍摄的摄像头,进行机体视觉定位时,也需要靠姿态角进行视觉反馈补偿。
- 要解算姿态角,就要研究从地理坐标系到机体坐标系的转换过程。这个转换过程不是唯一的,比如可以先绕X轴旋转 θ \theta θ,再绕Y轴旋转 γ \gamma γ,最后绕Z轴旋转 ψ \psi ψ,这样得到的一组姿态角称为卡尔丹角;也可以按
ZYX的顺序旋转,这样得到的一组姿态角称为欧拉角(这是最常用的,pitch,roll,yaw)。不管按照什么顺序,得到的角度都可以称作广义欧拉角。实际理论分析时,旋转顺序不是很重要,这个顺序会影响四元数与欧拉角的关系,但是都可以进行解算。
2、坐标变换和旋转矩阵
下面从最基本的坐标变换入手开始讲解,请看如下坐标系旋转: O A X A Y A Z A O_AX_AY_AZ_A OAXAYAZA绕OX旋转 θ \theta θ到 O B X B Y B Z B O_BX_BY_BZ_B OBXBYBZB

对于原系 O A X A Y A Z A O_AX_AY_AZ_A OAXAYAZA中的一个向量 [ r x A , r y A , r z A ] [r_{x_A},r_{y_A},r_{z_A}] [rxA,ryA,rzA],转换到新系 O B X B Y B Z B O_BX_BY_BZ_B OBXBYBZB中的向量 [ r x B , r y B , r z B ] [r_{x_B},r_{y_B},r_{z_B}] [rxB,ryB,rzB],有:
r x B = r x A r y B = c o s ( θ ) r y A + s i n ( θ ) r z A r z B = − s i n ( θ ) r y A + c o s ( θ ) r z A r_{x_B}=r_{x_A} \\ r_{y_B}=cos(\theta)r_{y_A}+sin(\theta)r_{z_A} \\ r_{z_B}=-sin(\theta)r_{y_A}+cos(\theta)r_{z_A} rxB=rxAryB=cos(θ)ryA+sin(θ)rzArzB=−sin(θ)ryA+cos(θ)rzA
可以用旋转矩阵表示
[ r x B r y B r z B ] = [ 1 0 0 0 c o s ( θ ) s i n ( θ ) 0 − s i n ( θ ) c o s ( θ ) ] [ r x A r y A r z A ] {\left[ \begin{array}{c} r_{x_B}\\ r_{y_B}\\ r_{z_B} \end{array} \right ]}= {\left[ \begin{array}{ccc} 1 & 0 & 0\\ 0 & cos(\theta) & sin(\theta)\\ 0 & -sin(\theta) & cos(\theta) \end{array} \right ]} {\left[ \begin{array}{c} r_{x_A}\\ r_{y_A}\\ r_{z_A} \end{array} \right ]} ⎣⎡rxBryBrzB⎦⎤=⎣⎡1000cos(θ)−sin(θ)0sin(θ)cos(θ)⎦⎤⎣⎡rxAryArzA⎦⎤
-
中间的就是 绕x轴旋转 θ \theta θ 的旋转矩阵,记作
C x ( θ ) = [ 1 0 0 0 c o s ( θ ) s i n ( θ ) 0 − s i n ( θ ) c o s ( θ ) ] C_{x_(\theta)}= {\left[ \begin{array}{ccc} 1 & 0 & 0\\ 0 & cos(\theta) & sin(\theta)\\ 0 & -sin(\theta) & cos(\theta) \end{array} \right ]} Cx(θ)=⎣⎡1000cos(θ)−sin(θ)0sin(θ)cos(θ)⎦⎤ -
同样的,还有 绕y轴旋转 γ \gamma γ 的旋转矩阵,记作
C y ( γ ) = [ c o s ( γ ) 0 − s i n ( γ ) 0 1 0 s i n ( γ ) 0 c o s ( γ ) ] C_{y_(\gamma)}= {\left[ \begin{array}{ccc} cos(\gamma) & 0 & -sin(\gamma)\\ 0 & 1 & 0\\ sin(\gamma) & 0 & cos(\gamma) \end{array} \right ]} Cy(γ)=⎣⎡cos(γ)0sin(γ)010−sin(γ)0cos(γ)⎦⎤ -
同样的,还有 绕z轴旋转 ψ \psi ψ 的旋转矩阵,记作
C z ( ψ ) = [ c o s ( ψ ) − s i n ( ψ ) 0 s i n ( ψ ) c o s ( ψ ) 0 0 0 1 ] C_{z_(\psi)}= {\left[ \begin{array}{ccc} cos(\psi) & -sin(\psi) & 0 \\ sin(\psi) & cos(\psi) & 0 \\ 0 & 0 & 1 \end{array} \right ]} Cz(ψ)=⎣⎡cos(ψ)sin(ψ)0−sin(ψ)cos(ψ)0001⎦⎤ -
假如现在我们按
ZXY的顺序,从地理坐标系 O n X n Y n Z n O_nX_nY_nZ_n OnXnYnZn旋转到机体坐标系 O b X b Y b Z b O_bX_bY_bZ_b ObXbYbZb,整体旋转矩阵为
C n b = C y ( γ ) C x ( θ ) C z ( ψ ) = [ c o s ( γ ) c o s ( ψ ) + s i n ( γ ) s i n ( ψ ) s i n ( θ ) − c o s ( γ ) s i n ( ψ ) + s i n ( γ ) c o s ( ψ ) c o s ( θ ) − s i n ( ψ ) c o s ( θ ) s i n ( ψ ) c o s ( θ ) c o s ( ψ ) c o s ( θ ) s i n ( θ ) s i n ( γ ) c o s ( ψ ) − c o s ( γ ) s i n ( ψ ) s i n ( θ ) − s i n ( γ ) s i n ( ψ ) − c o s ( γ ) c o s ( ψ ) s i n ( θ ) c o s ( γ ) c o s ( θ ) ] C_n^b=C_{y_(\gamma)}C_{x_(\theta)}C_{z_(\psi)}= {\left[ \begin{array}{ccc} cos(\gamma)cos(\psi)+ sin(\gamma)sin(\psi)sin(\theta) & -cos(\gamma)sin(\psi)+sin(\gamma)cos(\psi)cos(\theta) & -sin(\psi)cos(\theta) \\ sin(\psi)cos(\theta)& cos(\psi)cos(\theta) & sin(\theta) \\ sin(\gamma)cos(\psi)- cos(\gamma)sin(\psi)sin(\theta) & -sin(\gamma)s in(\psi)-cos(\gamma)cos(\psi)sin(\theta) & cos(\gamma)cos(\theta) \end{array} \right ]} Cnb=Cy(γ)Cx(θ)Cz(ψ)=⎣⎡cos(γ)cos(ψ)+sin(γ)sin(ψ)sin(θ)sin(ψ)cos(θ)sin(γ)cos(ψ)−cos(γ)sin(ψ)sin(θ)−cos(γ)sin(ψ)+sin(γ)cos(ψ)cos(θ)cos(ψ)cos(θ)−sin(γ)sin(ψ)−cos(γ)cos(ψ)sin(θ)−sin(ψ)cos(θ)sin(θ)cos(γ)cos(θ)⎦⎤ -
注意一点,如果从n系到b系的旋转矩阵为 C n b C_n^b Cnb,则从b系到n系的旋转矩阵为 C n b T {C_n^b}^T CnbT,显然有 C n b ∗ C n b T = E C_n^b*{C_n^b}^T=E Cnb∗CnbT=E,所以旋转矩阵是正交矩阵
-
这个结论不能直接使用,一方面这个直接是不可解的,另一方面大量三角函数运算会导致大量资源占用。
3、四元数
- 四元数是一种超复数,由四个元构成: Q ( q 0 , q 1 , q 2 , q 3 ) = q 0 + q 1 i + q 2 i + q 3 k Q(q_0,q_1,q_2,q_3)=q_0+q_1i+q_2i+q_3k Q(q0,q1,q2,q3)=q0+q1i+q2i+q3k
- 关于四元数更详细的介绍可以参考四元数
- 利用四元数我们可以提出另一种描述空间矩阵的方法,具体可以参考秦永元的《惯性导航》和【教程】四旋翼飞行器姿态解算算法入门学习-Rick Grimes
(1)四元数和欧拉角的关系
- 注意这三个式子中, θ \theta θ是绕Y轴转角, ϕ \phi ϕ是绕X轴转角, ψ \psi ψ是绕Z轴转角,和前文有所不同
- 按
ZYX的顺序从地理坐标系 O e X e Y e Z e O_eX_eY_eZ_e OeXeYeZe旋转到机体坐标系 O b X b Y b Z b O_bX_bY_bZ_b ObXbYbZb,整体旋转矩阵为

- 对应的四元数表示法为:

- 解算出的欧拉角为

(2)四元数的求解
- 飞行器姿态的改变,可以对应到旋转矩阵的改变,进一步对应到四元数的改变。实时姿态计算,实际上也就是实时更新四元数。
- 我们可以构建四元数关于时间的微分方程,来研究四元数关于时间的变化规律,求解该微分方程,即可解出四元数
1、建立微分方程
- 从四元数的三角表示法入手推到微分方程,具体推到过程可以参考秦永元的《惯性导航》
Q = c o s ( θ ) 2 + λ s i n ( θ ) 2 Q=\frac{cos(\theta)}{2}+\frac{\lambda sin(\theta)}{2} Q=2cos(θ)+2λsin(θ) d Q d t = 1 / 2 [ 0 − ω x − ω y − ω x ω x 0 ω z − ω y ω y − ω z 0 ω x ω z ω y − ω x 0 ] ⋅ [ q 0 q 1 q 2 q 3 ] \frac{dQ}{dt}=1/2 {\left[ \begin{array}{cccc} 0 & -\omega_x & -\omega_y & -\omega_x\\ \omega_x & 0 & \omega_z & -\omega_y\\ \omega_y & -\omega_z & 0 & \omega_x\\ \omega_z & \omega_y & -\omega_x & 0 \end{array} \right ]}· {\left[ \begin{array}{c} q_0\\ q_1\\ q_2\\ q_3 \end{array} \right ]} dtdQ=1/2⎣⎢⎢⎡0ωxωyωz−ωx0−ωzωy−ωyωz0−ωx−ωx−ωyωx0⎦⎥⎥⎤⋅⎣⎢⎢⎡q0q1q2q3⎦⎥⎥⎤ 记 为 d Q d t = Φ ⋅ Q 记为 \frac{dQ}{dt}=\Phi·Q 记为dtdQ=Φ⋅Q
2、一阶龙格库塔法求解微分方程
一阶龙格库塔法是求解微分方程常用的工程方法,原理是把微分转化为微元增量,利用递推迭代的方法求解
-
设有微分方程 d y d x = f ( x , y ) \frac{dy}{dx}=f(x,y) dxdy=f(x,y)
求解y的迭代公式为 y ( λ + Δ λ ) = y ( λ ) + Δ λ ⋅ f ( x ( λ ) , y ( λ ) ) y(\lambda+\Delta\lambda)=y(\lambda)+\Delta\lambda·f(x(\lambda),y(\lambda)) y(λ+Δλ)=y(λ)+Δλ⋅f(x(λ),y(λ))
-
对应到四元数微分方程:
Q ( t − Δ t ) = Q ( t ) + Δ t ⋅ Φ ( t ) ⋅ Q ( t ) Q(t-\Delta t)=Q(t)+\Delta t·\Phi(t)·Q(t) Q(t−Δt)=Q(t)+Δt⋅Φ(t)⋅Q(t)
整理得
[ q 0 q 1 q 2 q 3 ] t + Δ t = [ q 0 q 1 q 2 q 3 ] t + 1 2 ⋅ Δ t ⋅ [ − ω x ⋅ q 1 − ω y ⋅ q 2 − ω z ⋅ q 3 ω x ⋅ q 0 − ω y ⋅ q 3 + ω z ⋅ q 2 ω x ⋅ q 3 + ω y ⋅ q 0 − ω z ⋅ q 1 − ω x ⋅ q 2 + ω y ⋅ q 1 + ω z ⋅ q 0 ] {\left[ \begin{array}{c} q_0\\ q_1\\ q_2\\ q_3 \end{array} \right ]}_{t+\Delta t}= {\left[ \begin{array}{c} q_0\\ q_1\\ q_2\\ q_3 \end{array} \right ]}_{t}+ \frac{1}{2}· \Delta t· {\left[ \begin{array}{c} -\omega_x·q_1 -\omega_y·q_2 -\omega_z ·q_3\\ \omega_x·q_0 -\omega_y·q_3 +\omega_z ·q_2\\ \omega_x·q_3 +\omega_y·q_0 -\omega_z ·q_1\\ -\omega_x·q_2 +\omega_y·q_1 +\omega_z ·q_0 \end{array} \right ]} ⎣⎢⎢⎡q0q1q2q3⎦⎥⎥⎤t+Δt=⎣⎢⎢⎡q0q1q2q3⎦⎥⎥⎤t+21⋅Δt⋅⎣⎢⎢⎡−ωx⋅q1−ωy⋅q2−ωz⋅q3ωx⋅q0−ωy⋅q3+ωz⋅q2ωx⋅q3+ωy⋅q0−ωz⋅q1−ωx⋅q2+ωy⋅q1+ωz⋅q0⎦⎥⎥⎤
这里 ω \omega ω就是三轴角速度,可以用陀螺仪直接测得
4、旋转矩阵中的一列
- 旋转矩阵中的一列有特殊意义,它代表原坐标系中一个方向的单位向量(X/Y/Z),在新坐标系中对应的向量值
- 用方向向量(如X方向 [ 1 , 0 , 0 ] T [1,0,0]^T [1,0,0]T)左乘旋转矩阵可以轻易看出,这里不写了
二、匿名四轴姿态解算分析
按Ano_Imu.c文件顺序进行分析
1、坐标系定义
- 匿名四轴姿态解算部分主要写在
Ano_Imu.c中 - 匿名四轴程序中一共有三个坐标系:
- 地理坐标系,标记为w(官方定义如下)
- 机体坐标系,标记为a(官方定义如下)

- 航向坐标系,标记为h(专门解释一下,四旋翼飞行时,姿态角pitch和roll一般很小,在任意时刻,如果我们粗略地认为飞行器始终与底面平行(把飞机摆正,使pitch=roll=0),此时的机体坐标系即为航向坐标系)
2、坐标系转换
(1)匿名旋转坐标系
- 匿名的坐标系变换,是按是按
ZYX顺序从地理坐标系转到机体坐标系的,这个旋转矩阵是前面提过的 (注意这三个式子中, θ \theta θ是绕Y轴转角, ϕ \phi ϕ是绕X轴转角, ψ \psi ψ是绕Z轴转角)
C w a = [ c o s ( θ ) c o s ( ψ ) s i n ( ψ ) c o s ( θ ) − s i n ( θ ) s i n ( ϕ ) s i n ( θ ) c o s ( ψ ) − c o s ( ϕ ) s i n ( ψ ) s i n ( ϕ ) s i n ( θ ) s i n ( ψ ) + c o s ( ϕ ) c o s ( ψ ) s i n ( ϕ ) c o s ( θ ) c o s ( ϕ ) s i n ( θ ) c o s ( ψ ) + s i n ( ϕ ) s i n ( ψ ) c o s ( ϕ ) s i n ( θ ) s i n ( ψ ) − s i n ( ϕ ) c o s ( ψ ) c o s ( ϕ ) c o s ( θ ) ] C_w^a= {\left[ \begin{array}{ccc} cos(\theta)cos(\psi) & sin(\psi)cos(\theta) & -sin(\theta) \\ sin(\phi)sin(\theta)cos(\psi)- cos(\phi)sin(\psi) & sin(\phi)sin(\theta)sin(\psi)+cos(\phi)cos(\psi) & sin(\phi)cos(\theta) \\ cos(\phi)sin(\theta)cos(\psi)+ sin(\phi)sin(\psi) & cos(\phi)sin(\theta)sin(\psi)-sin(\phi)cos(\psi) & cos(\phi)cos(\theta) \end{array} \right ]} Cwa=⎣⎡cos(θ)cos(ψ)sin(ϕ)sin(θ)cos(ψ)−cos(ϕ)sin(ψ)cos(ϕ)sin(θ)cos(ψ)+sin(ϕ)sin(ψ)sin(ψ)cos(θ)sin(ϕ)sin(θ)sin(ψ)+cos(ϕ)cos(ψ)cos(ϕ)sin(θ)sin(ψ)−sin(ϕ)cos(ψ)−sin(θ)sin(ϕ)cos(θ)cos(ϕ)cos(θ)⎦⎤
- 程序中用
二维数组att_matrix表示从机体坐标系转到地理坐标系的旋转矩阵,是上面那个的转置
a t t _ m a t r i x = C a w = ( C w a ) T = [ c o s ( θ ) c o s ( ψ ) s i n ( ϕ ) s i n ( θ ) c o s ( ψ ) − c o s ( ϕ ) s i n ( ψ ) c o s ( ϕ ) s i n ( θ ) c o s ( ψ ) + s i n ( ϕ ) s i n ( ψ ) s i n ( ψ ) c o s ( θ ) s i n ( ϕ ) s i n ( θ ) s i n ( ψ ) + c o s ( ϕ ) c o s ( ψ ) c o s ( ϕ ) s i n ( θ ) s i n ( ψ ) − s i n ( ϕ ) c o s ( ψ ) − s i n ( θ ) s i n ( ϕ ) c o s ( θ ) c o s ( ϕ ) c o s ( θ ) ] att\_matrix=C_a^w=(C_w^a)^T= {\left[ \begin{array}{ccc} cos(\theta)cos(\psi) & sin(\phi)sin(\theta)cos(\psi)- cos(\phi)sin(\psi) &cos(\phi)sin(\theta)cos(\psi)+ sin(\phi)sin(\psi) \\ sin(\psi)cos(\theta) &sin(\phi)sin(\theta)sin(\psi)+cos(\phi)cos(\psi) & cos(\phi)sin(\theta)sin(\psi)-sin(\phi)cos(\psi) \\ -sin(\theta) &sin(\phi)cos(\theta) & cos(\phi)cos(\theta) \end{array} \right ]} att_matrix=Caw=(Cwa)T=⎣⎡cos(θ)cos(ψ)sin(ψ)cos(θ)−sin(θ)sin(ϕ)sin(θ)cos(ψ)−cos(ϕ)sin(ψ)sin(ϕ)sin(θ)sin(ψ)+cos(ϕ)cos(ψ)sin(ϕ)cos(θ)cos(ϕ)sin(θ)cos(ψ)+sin(ϕ)sin(ψ)cos(ϕ)sin(θ)sin(ψ)−sin(ϕ)cos(ψ)cos(ϕ)cos(θ)⎦⎤ - 注意这里绕Y轴转角 θ \theta θ (pitch),绕X轴转角 ϕ \phi ϕ (roll)都是很小的角
(2)相关代码分析
#include "Ano_Imu.h"
#include "Ano_Math.h"
#include "Ano_Filter.h"
//#include "ANO_RC.h"
/*参考坐标,定义为ANO坐标*
俯视,机头方向为x正方向
+x
|
+y--|--
|
*/
//世界坐标平面XY转平面航向坐标XY
void w2h_2d_trans(float w[VEC_XYZ],float ref_ax[VEC_XYZ],float h[VEC_XYZ])
{
h[X] = w[X] * ref_ax[X] + w[Y] *ref_ax[Y];
h[Y] = w[X] *(-ref_ax[Y]) + w[Y] *ref_ax[X];
}
//平面航向坐标XY转世界坐标平面XY
void h2w_2d_trans(float h[VEC_XYZ],float ref_ax[VEC_XYZ],float w[VEC_XYZ])
{
w[X] = h[X] *ref_ax[X] + h[Y] *(-ref_ax[Y]);
w[Y] = h[X] *ref_ax[Y] + h[Y] * ref_ax[X];
}
//载体坐标转世界坐标(ANO约定等同与地理坐标)
float att_matrix[3][3]; //必须由姿态解算算出该矩阵
void a2w_3d_trans(float a[VEC_XYZ],float w[VEC_XYZ])
{
for(u8 i = 0;i<3;i++)
{
float temp = 0;
for(u8 j = 0;j<3;j++)
{
temp += a[j] *att_matrix[i][j];
}
w[i] = temp;
}
}
- 这是
Ano_Imu.c文件的起始部分,提供了三个坐标系转换函数,可以实现w系和h系XY方向向量互转,以及从a系到w系三轴方向向量转换 - 这里实际上是三个旋转矩阵运算,分别为
- void w2h_2d_trans(float w[VEC_XYZ],float ref_ax[VEC_XYZ],float h[VEC_XYZ])
[ h [ X ] h [ Y ] ] = [ r e f _ a x [ X ] r e f _ a x [ Y ] − r e f _ a x [ Y ] r e f _ a x [ X ] ] [ w [ X ] w [ Y ] ] {\left[ \begin{array}{c} h[X]\\ h[Y] \end{array} \right ]}= {\left[ \begin{array}{ccc} ref\_ax[X] & ref\_ax[Y]\\ -ref\_ax[Y] & ref\_ax[X] \end{array} \right ]} {\left[ \begin{array}{c} w[X]\\ w[Y] \end{array} \right ]} [h[X]h[Y]]=[ref_ax[X]−ref_ax[Y]ref_ax[Y]ref_ax[X]][w[X]w[Y]]
- void h2w_2d_trans(float h[VEC_XYZ],float ref_ax[VEC_XYZ],float w[VEC_XYZ])
[ w [ X ] w [ Y ] ] = [ r e f _ a x [ X ] − r e f _ a x [ Y ] r e f _ a x [ Y ] r e f _ a x [ X ] ] [ h [ X ] h [ Y ] ] {\left[ \begin{array}{c} w[X]\\ w[Y] \end{array} \right ]}= {\left[ \begin{array}{ccc} ref\_ax[X] & -ref\_ax[Y]\\ ref\_ax[Y] & ref\_ax[X] \end{array} \right ]} {\left[ \begin{array}{c} h[X]\\ h[Y] \end{array} \right ]} [w[X]w[Y]]=[ref_ax[X]ref_ax[Y]−ref_ax[Y]ref_ax[X]][h[X]h[Y]]
- void a2w_3d_trans(float a[VEC_XYZ],float w[VEC_XYZ])
[ w [ X ] w [ Y ] w [ Z ] ] = [ a t t _ m a t r i x [ 0 ] [ 0 ] a t t _ m a t r i x [ 0 ] [ 1 ] a t t _ m a t r i x [ 0 ] [ 2 ] a t t _ m a t r i x [ 1 ] [ 0 ] a t t _ m a t r i x [ 1 ] [ 1 ] a t t _ m a t r i x [ 1 ] [ 2 ] a t t _ m a t r i x [ 2 ] [ 0 ] a t t _ m a t r i x [ 2 ] [ 1 ] a t t _ m a t r i x [ 2 ] [ 2 ] ] ⋅ [ a [ X ] a [ Y ] a [ Z ] ] {\left[ \begin{array}{c} w[X]\\ w[Y]\\ w[Z] \end{array} \right ]}= {\left[ \begin{array}{cccc} att\_matrix[0][0] & att\_matrix[0][1] & att\_matrix[0][2]\\ att\_matrix[1][0] & att\_matrix[1][1] & att\_matrix[1][2]\\ att\_matrix[2][0] & att\_matrix[2][1] & att\_matrix[2][2] \end{array} \right ]}· {\left[ \begin{array}{c} a[X]\\ a[Y]\\ a[Z] \end{array} \right ]} ⎣⎡w[X]w[Y]w[Z]⎦⎤=⎣⎡att_matrix[0][0]att_matrix[1][0]att_matrix[2][0]att_matrix[0][1]att_matrix[1][1]att_matrix[2][1]att_matrix[0][2]att_matrix[1][2]att_matrix[2][2]⎦⎤⋅⎣⎡a[X]a[Y]a[Z]⎦⎤
- 第三个很简单,就是直接带入旋转矩阵运算,这里分析一下前两个是啥意思
- 首先找到调用处,发现
形参ref_ax的实参是imu_data.hx_vec - 查看
imu_data.hx_vec是什么,找到
//水平面方向向量
//my_sqrt_reciprocal求开方的倒数;my_pow求平方
float hx_vec_reci = my_sqrt_reciprocal(my_pow(att_matrix[0][0]) + my_pow(att_matrix[1][0]));
imu->hx_vec[X] = att_matrix[0][0] *hx_vec_reci;
imu->hx_vec[Y] = att_matrix[1][0] *hx_vec_reci;
-
还记得嘛
a t t _ m a t r i x = [ c o s ( θ ) c o s ( ψ ) s i n ( ϕ ) s i n ( θ ) c o s ( ψ ) − c o s ( ϕ ) s i n ( ψ ) c o s ( ϕ ) s i n ( θ ) c o s ( ψ ) + s i n ( ϕ ) s i n ( ψ ) s i n ( ψ ) c o s ( θ ) s i n ( ϕ ) s i n ( θ ) s i n ( ψ ) + c o s ( ϕ ) c o s ( ψ ) c o s ( ϕ ) s i n ( θ ) s i n ( ψ ) − s i n ( ϕ ) c o s ( ψ ) − s i n ( θ ) s i n ( ϕ ) c o s ( θ ) c o s ( ϕ ) c o s ( θ ) ] att\_matrix= {\left[ \begin{array}{ccc} cos(\theta)cos(\psi) & sin(\phi)sin(\theta)cos(\psi)- cos(\phi)sin(\psi) &cos(\phi)sin(\theta)cos(\psi)+ sin(\phi)sin(\psi) \\ sin(\psi)cos(\theta) &sin(\phi)sin(\theta)sin(\psi)+cos(\phi)cos(\psi) & cos(\phi)sin(\theta)sin(\psi)-sin(\phi)cos(\psi) \\ -sin(\theta) &sin(\phi)cos(\theta) & cos(\phi)cos(\theta) \end{array} \right ]} att_matrix=⎣⎡cos(θ)cos(ψ)sin(ψ)cos(θ)−sin(θ)sin(ϕ)sin(θ)cos(ψ)−cos(ϕ)sin(ψ)sin(ϕ)sin(θ)sin(ψ)+cos(ϕ)cos(ψ)sin(ϕ)cos(θ)cos(ϕ)sin(θ)cos(ψ)+sin(ϕ)sin(ψ)cos(ϕ)sin(θ)sin(ψ)−sin(ϕ)cos(ψ)cos(ϕ)cos(θ)⎦⎤
所以
h x _ v e c _ r e c i = 1 c o s 2 ( θ ) c o s 2 ( ψ ) + c o s 2 ( θ ) s i n 2 ( ψ ) = 1 c o s 2 ( θ ) = 1 c o s ( θ ) hx\_vec\_reci = \frac{1}{\sqrt{cos^2(\theta)cos^2(\psi)+cos^2(\theta)sin^2(\psi)}}=\frac{1}{\sqrt{cos^2(\theta)}}=\frac{1}{cos(\theta)} hx_vec_reci=cos2(θ)cos2(ψ)+cos2(θ)sin2(ψ)1=cos2(θ)1=cos(θ)1 i m u − > h x _ v e c [ X ] = c o s ( ψ ) imu->hx\_vec[X]=cos(\psi) imu−>hx_vec[X]=cos(ψ) i m u − > h x _ v e c [ Y ] = s i n ( ψ ) imu->hx\_vec[Y]=sin(\psi) imu−>hx_vec[Y]=sin(ψ)
物理意义上,hx_vec[X]和hx_vec[Y]来自机体系转地面系的第一列,表示机体系中的X单位向量(机头方向) [ 1 , 0 , 0 ] T [1 ,0 ,0]^T [1,0,0]T,在 θ = ϕ = 0 \theta=\phi=0 θ=ϕ=0时,仅绕Z轴旋转 ψ \psi ψ后,得到的向量中的XY项。如下图所示,不难看出这指示了航向坐标的机头方向,所以匿名在注释中把它们称为水平面方向向量

-
回代,有以下关系,可见航向坐标系h就是地理系w只绕Z轴旋转(yaw),忽略pitch和roll旋转的结果
[ h [ X ] h [ Y ] ] = [ c o s ( ψ ) s i n ( ψ ) − s i n ( ψ ) c o s ( ψ ) ] [ w [ X ] w [ Y ] ] {\left[ \begin{array}{c} h[X]\\ h[Y] \end{array} \right ]}= {\left[ \begin{array}{ccc} cos(\psi) & sin(\psi)\\ -sin(\psi) & cos(\psi) \end{array} \right ]} {\left[ \begin{array}{c} w[X]\\ w[Y] \end{array} \right ]} [h[X]h[Y]]=[cos(ψ)−sin(ψ)sin(ψ)cos(ψ)][w[X]w[Y]]
[ w [ X ] w [ Y ] ] = [ c o s ( ψ ) − s i n ( ψ ) s i n ( ψ ) c o s ( ψ ) ] [ h [ X ] h [ Y ] ] {\left[ \begin{array}{c} w[X]\\ w[Y] \end{array} \right ]}= {\left[ \begin{array}{ccc} cos(\psi) & -sin(\psi)\\ sin(\psi) &cos(\psi) \end{array} \right ]} {\left[ \begin{array}{c} h[X]\\ h[Y] \end{array} \right ]} [w[X]w[Y]]=[cos(ψ)sin(ψ)−sin(ψ)cos(ψ)][h[X]h[Y]]
3、IMU_update函数分析
在三个坐标系变换函数后,下一个就是IMU_update函数了,下面进行分析
(1)整体分析
-
此函数原型
void IMU_update(float dT,_imu_state_st *state,float gyr[VEC_XYZ], s32 acc[VEC_XYZ],s16 mag_val[VEC_XYZ],_imu_st *imu),参数包括计算周期dT,Imu标志*state,滤波转换后的三轴陀螺仪数据gyr,滤波转换后的三轴加速度计数据acc,滤波转换后的三轴磁力计数据gyr,Imu数据结构体*Imu -
任务:
- 利用互补滤波方法,用加速度计和磁力计数据对陀螺仪数据进行补偿。
- 使用一阶龙格库塔法更新四元数和旋转矩阵。
- 利用旋转矩阵计算三个坐标系下的各项数据值,存入
*Imu。 - 根据
*state中的标记,对互补滤波系数进行修正,进一步提高解算准确度。
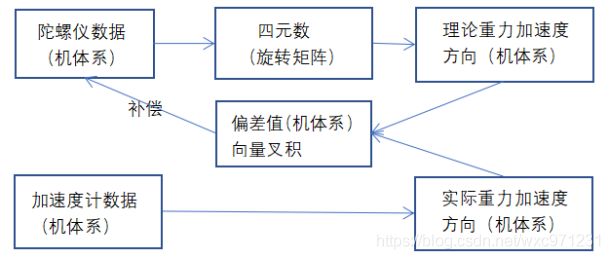
(2)互补滤波原理相关
-
姿态角可以用两个传感器计算
- 陀螺仪数据积分(陀螺仪输出三轴角速度)
- 加速度计数据正交分解(加速度计输出三轴平动加速度,当飞机匀速运动时,数据是重力加速度在三坐标轴方向上的分量)
-
注意这两个传感器测到的数据都是在传感器坐标系中的,因为传感器和机体固连,所以也可以看做测得的数据在机体坐标系下
-
两个传感器的数据漂移有不同的特点:
- 陀螺仪积分数据会缓慢漂移,也就是具有低频误差
- 加速度计非常灵敏,会受到抖动影响出现数据抖动,也就是具有高频误差
针对这种特点,如果我们可以找到一个方法融合两个传感器的数据,对误差进行补偿,就可以大大提高获取姿态角的精度 ,这种方法就是互补滤波
-
要补偿的对象:还记得吗,四元数更新方法如下
[ q 0 q 1 q 2 q 3 ] t + Δ t = [ q 0 q 1 q 2 q 3 ] t + 1 2 ⋅ Δ t ⋅ [ − ω x ⋅ q 1 − ω y ⋅ q 2 − ω z ⋅ q 3 ω x ⋅ q 0 − ω y ⋅ q 3 + ω z ⋅ q 2 ω x ⋅ q 3 + ω y ⋅ q 0 − ω z ⋅ q 1 − ω x ⋅ q 2 + ω y ⋅ q 1 + ω z ⋅ q 0 ] {\left[ \begin{array}{c} q_0\\ q_1\\ q_2\\ q_3 \end{array} \right ]}_{t+\Delta t}= {\left[ \begin{array}{c} q_0\\ q_1\\ q_2\\ q_3 \end{array} \right ]}_{t}+ \frac{1}{2}· \Delta t· {\left[ \begin{array}{c} -\omega_x·q_1 -\omega_y·q_2 -\omega_z ·q_3\\ \omega_x·q_0 -\omega_y·q_3 +\omega_z ·q_2\\ \omega_x·q_3 +\omega_y·q_0 -\omega_z ·q_1\\ -\omega_x·q_2 +\omega_y·q_1 +\omega_z ·q_0 \end{array} \right ]} ⎣⎢⎢⎡q0q1q2q3⎦⎥⎥⎤t+Δt=⎣⎢⎢⎡q0q1q2q3⎦⎥⎥⎤t+21⋅Δt⋅⎣⎢⎢⎡−ωx⋅q1−ωy⋅q2−ωz⋅q3ωx⋅q0−ωy⋅q3+ωz⋅q2ωx⋅q3+ωy⋅q0−ωz⋅q1−ωx⋅q2+ωy⋅q1+ωz⋅q0⎦⎥⎥⎤
最终的姿态角是用旋转矩阵,也就是用四元数解算出来的,而四元数依靠的唯一参数就是来自陀螺仪的三轴角速度数据,因此我们最终要补偿的是陀螺仪数据 -
补偿数据来自:补偿数据来自两个传感器测算同一数据的误差,不妨称它为
标准值,当补偿为0时,输出为陀螺仪积分数据,也就是完全置信于陀螺仪;当补偿为全部误差时,输出为加速度计数据,也就是完全置信于加速度计。补偿的比例即为置信于两个传感器的比例 -
“标准值”是什么数据:通常我们用机体系下的地理重力加速度方向向量作为上面所说的
标准值- 回顾一下上面
旋转矩阵中的一列相关内容,直接拿出旋转矩阵的第三列,就是利用陀螺仪测算的机体系下地理重力加速度方向向量(可以看做是积分计算得到的理论重力加速度分量) - 加速度计可以直接计算加速度,当飞机匀速运动时,它可以直接输出
机体系下地理重力加速度方向向量(可以看做是实际重力加速度分量)
- 回顾一下上面
-
误差的计算:
机体系下地理重力加速度方向向量实质是一个三维向量,所谓误差,实质就是两个三维方向向量的夹角,求这个夹角的方法相信大家高中都用过,就是计算向量叉积
有 向 量 A , B , 夹 角 为 θ , 则 有向量A,B,夹角为\theta,则 有向量A,B,夹角为θ,则 A × B = ∣ A ∣ ⋅ ∣ B ∣ ⋅ s i n θ A\times B=|A|·|B|·sin\theta A×B=∣A∣⋅∣B∣⋅sinθ- 对于两个传感器的数据,我们可以认为数据偏差(也就是两个三维方向向量的夹角 θ \theta θ)很小,这时我们近似认为 s i n θ = θ sin\theta=\theta sinθ=θ
- 在计算误差前,处理向量A,B为单位向量,这样就有 A × B = ∣ A ∣ ⋅ ∣ B ∣ ⋅ s i n θ = s i n θ = θ A\times B=|A|·|B|·sin\theta=sin\theta=\theta A×B=∣A∣⋅∣B∣⋅sinθ=sinθ=θ
-
补偿的方法:构造一个PI (比例-积分)控制器进行补偿,
G y r o _ c o m p e n s t a e = K p ⋅ e r r o r + K i ⋅ ∫ e r r o r Gyro\_compenstae=K_p·error+K_i·\int {error} Gyro_compenstae=Kp⋅error+Ki⋅∫error
虽然形式上完全一致,但最好不要把这个理解成自动控制的那种控制器。请这样理解:积分项用来消除静态误差,比例项用来控制传感器的可信度 -
小结一下加速度计和陀螺仪的互补融合:
- 标准值(被测的):地理系中重力方向 [ 0 , 0 , 1 ] T [0,0,1]^T [0,0,1]T在机体系的投影
- 加速度计测算(实际值):加速度计测算的加速度向量
- 陀螺仪测算(理论值): 旋转矩阵第三列,来自角速度积分
- 偏差计算:两个传感器数据单位化,然后叉积
- 补偿方法:PI控制器
- 注意:被补偿的陀螺仪数据是机体系的,这里都是在机体系进行的计算,所以可以直接补偿
-
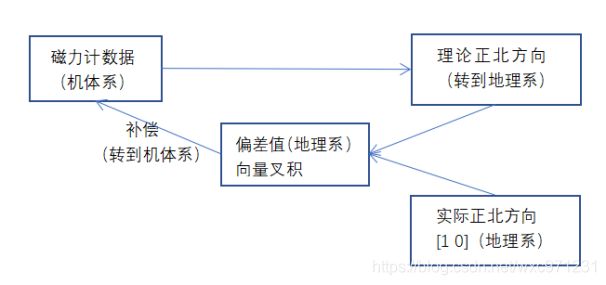
匿名对互补融合滤波做了优化,进一步融合了磁力计的数据,下面类比加速度计的融合方法进行分析。
- 磁力计测算什么:磁力计测算的是地理磁感线(正北方向)在机体坐标系下的投影。需要注意的是,虽然磁感线曲率和地球曲率不同,但是差距实际比较小,程序里直接把Z方向分量看做0了,这样可以简化单位化之类的计算
- 磁力计的误差特点:和加速度计一样,也是高频误差
- 标准值(真实值):地理系中的正北方向向量(二维向量,忽略Z方向),根据匿名坐标系定义,这是个定值 [ 1 , 0 ] [1,0] [1,0]
- 磁力计测算(理论值):磁力计数据右乘旋转矩阵转到地理系,取XY分量组成二维向量
- 偏差计算:传感器数据单位化,然后和 [ 1 , 0 ] [1,0] [1,0]叉积。注意这里和加速度计融合不太一样,因为那个偏差一般不超过45°,而这里可能很大。为了简化处理,直接用 s i n ψ sin\psi sinψ作为偏差值。还要注意, s i n ψ sin\psi sinψ的极值1和-1出现在90°和-90°,对于超过这个范围的偏差角 ψ \psi ψ,直接把误差值 s i n ψ sin\psi sinψ设为极值1或-1
- 补偿方法:纯P控制器(我不太清楚为什么匿名的程序里为啥不用PI控制器了)
- 注意:被补偿的陀螺仪数据是机体系的,这里都是在地理系进行的计算,所以补偿前要转换到机体系。(可以看出这里坐标系变来变去很麻烦,或许可以直接把地面系的[1 0]变换到机体系,直接和磁力计数据叉乘,进一步优化,不过我们没有试过这样可行不)
(3)互补滤波相关代码分析
以下内容是IMU_update完整函数,前半部分是互补滤波相关的,后半部分是一些校准标志处理什么的(这里不分析了)。带括号的是我补充的注释,没有的是匿名官方注释
//输入:acc是载体系a下的三轴加速度测量值(经过滤波和变换什么的),是加速度计直接反馈的(包含重力加速度成分,匀速时是重力加速度在机体下的投影)
// gyr: 陀螺仪数据(经过滤波和变换什么的),表示(载体系)相对地面系的三轴角速度
// mag_val:磁力计数据(没滤过波),表示地理系正比方向在机体系的三轴投影
// dT: 计算周期
// *state: imu的状态结构体
// *imu: imu相关数据,要向这里赋值
void IMU_update(float dT,_imu_state_st *state,float gyr[VEC_XYZ], s32 acc[VEC_XYZ],s16 mag_val[VEC_XYZ],_imu_st *imu)
{
// const float kp = 0.2f,ki = 0.001f;
// const float kmp = 0.1f;
//互补滤波系数
static float kp_use = 0; //(加速度计误差比例系数,越大越倾向加速度计)
static float ki_use = 0; //(加速度计误差积分积分系数)
static float mkp_use = 0; //(磁力计修正系数)
float acc_norm_l; //(加速度向量的模)
float acc_norm_l_recip; //(加速度向量的模的倒数)
float q_norm_l; //(四元数的模)
float acc_norm[VEC_XYZ]; //(单位化的加速度向量)
float d_angle[VEC_XYZ]; //(微元转角,即滤波修正后的角速度值)
//(旋转矩阵需要的一些四元数,先算好调用快一点)
// q0q0 = imu->w * imu->w;
q0q1 = imu->w * imu->x;
q0q2 = imu->w * imu->y;
q1q1 = imu->x * imu->x;
q1q3 = imu->x * imu->z;
q2q2 = imu->y * imu->y;
q2q3 = imu->y * imu->z;
q3q3 = imu->z * imu->z;
q1q2 = imu->x * imu->y;
q0q3 = imu->w * imu->z;
//(这里实际执行不到)
if(state->obs_en)
{
//计算机体坐标下的运动加速度观测量。坐标系为北西天
for(u8 i = 0;i<3;i++)
{
s32 temp = 0;
for(u8 j = 0;j<3;j++)
{
temp += imu->obs_acc_w[j] *att_matrix[j][i];//t[i][j] 转置为 t[j][i]
}
imu->obs_acc_a[i] = temp;
imu->gra_acc[i] = acc[i] - imu->obs_acc_a[i];
}
}
//(只执行这句)
else
{
for(u8 i = 0;i<3;i++)
{
imu->gra_acc[i] = acc[i]; //(把加速度计测量值传给结构体保存)
}
}
//(加速度向量模的倒数)
acc_norm_l_recip = my_sqrt_reciprocal(my_pow(imu->gra_acc[X]) + my_pow(imu->gra_acc[Y]) + my_pow(imu->gra_acc[Z]));
//(加速度向量模)
acc_norm_l = safe_div(1,acc_norm_l_recip,0);
// 加速度计的读数,单位化。
for(u8 i = 0;i<3;i++)
{
acc_norm[i] = imu->gra_acc[i] *acc_norm_l_recip;
}
//(att_matrix是从机体系a到地理系w的转换矩阵)
// 载体坐标下的(地理)x方向向量,单位化。 (地面系北方x [1 0 0]T转到机体系中,w到a系旋转矩阵第一列,可以看作地理x方向在机体系的三个分量)
att_matrix[0][0] = imu->x_vec[X] = 1 - (2*q2q2 + 2*q3q3);
att_matrix[0][1] = imu->x_vec[Y] = 2*q1q2 - 2*q0q3;
att_matrix[0][2] = imu->x_vec[Z] = 2*q1q3 + 2*q0q2;
// 载体坐标下的(地理)y方向向量,单位化。 (地面系西方y [0 1 0]T转到机体系中,w到a系旋转矩阵第二列,可以看作地理y方向在机体系的三个分量)
att_matrix[1][0] = imu->y_vec[X] = 2*q1q2 + 2*q0q3;
att_matrix[1][1] = imu->y_vec[Y] = 1 - (2*q1q1 + 2*q3q3);
att_matrix[1][2] = imu->y_vec[Z] = 2*q2q3 - 2*q0q1;
// 载体坐标下的(地理)z方向向量(等效重力向量、重力加速度向量),单位化。 (地面系天空z [0 0 1]T转到机体系中,w到a系旋转矩阵第三列,可以看作地理z方向在机体系的三个分量)
att_matrix[2][0] = imu->z_vec[X] = 2*q1q3 - 2*q0q2;
att_matrix[2][1] = imu->z_vec[Y] = 2*q2q3 + 2*q0q1;
att_matrix[2][2] = imu->z_vec[Z] = 1 - (2*q1q1 + 2*q2q2);
//水平面方向向量 (a到w系第一列XY,机体系x [1 0 0]T 转到地面系后的XY向量,也就是航向坐标系的机头指向)
float hx_vec_reci = my_sqrt_reciprocal(my_pow(att_matrix[0][0]) + my_pow(att_matrix[1][0]));
imu->hx_vec[X] = att_matrix[0][0] *hx_vec_reci;
imu->hx_vec[Y] = att_matrix[1][0] *hx_vec_reci;
//计算载体坐标下的运动加速度 (加速度传感器测量值去掉重力加速度成分,得到机体系中的a_acc,与姿态解算无关)
for(u8 i = 0;i<3;i++)
{
imu->a_acc[i] = (s32)(acc[i] - 981 *imu->z_vec[i]);
}
//计算世界坐标下的运动加速度。坐标系为北西天 (利用旋转矩阵变换a_acc,得到地理系中的加速度值w_acc)
for(u8 i = 0;i<3;i++)
{
s32 temp = 0;
for(u8 j = 0;j<3;j++)
{
temp += imu->a_acc[j] *att_matrix[i][j];
}
imu->w_acc[i] = temp;
}
//(再从地理系转换到航向系,得到航向系中加速度值h_acc)
w2h_2d_trans(imu->w_acc,imu_data.hx_vec,imu->h_acc);
// 测量值与等效重力向量的叉积(计算向量误差)。
/*(这里是把加速度计测量的三轴向量,和载体坐标下的(地理)z方向向量imu->z_vec做叉乘,得到和二者垂直的新向量,
acc_norm表示的重力方向来自加速度计,imu->z_vec表示的重力方向来自陀螺仪,这里计算向量外积实质上是在算二者夹角,准备进行融合滤波) */
vec_err[X] = (acc_norm[Y] * imu->z_vec[Z] - imu->z_vec[Y] * acc_norm[Z]);
vec_err[Y] = -(acc_norm[X] * imu->z_vec[Z] - imu->z_vec[X] * acc_norm[Z]);
vec_err[Z] = -(acc_norm[Y] * imu->z_vec[X] - imu->z_vec[Y] * acc_norm[X]);
//(进行磁力计互补融合滤波)
#ifdef USE_MAG
//电子罗盘赋值为float矢量
for(u8 i = 0;i<3;i++)
{
mag_val_f[i] = (float)mag_val[i];
}
if(!(mag_val[X] ==0 && mag_val[Y] == 0 && mag_val[Z] == 0))
{
//把载体坐标下的罗盘数据转换到地理坐标下
a2w_3d_trans(mag_val_f,imu->w_mag);
//计算方向向量归一化系数(模的倒数)
float l_re_tmp = my_sqrt_reciprocal(my_pow(imu->w_mag[0]) + my_pow(imu->w_mag[1]));
//计算南北朝向向量
mag_2d_w_vec[1][0] = imu->w_mag[0] *l_re_tmp;
mag_2d_w_vec[1][1] = imu->w_mag[1] *l_re_tmp;
//计算南北朝向误差(叉乘),地理坐标中,水平面磁场方向向量应恒为南北 (1,0)
mag_yaw_err = vec_2_cross_product(mag_2d_w_vec[1],mag_2d_w_vec[0]);
//计算南北朝向向量点乘,判断同向或反向
mag_err_dot_prudoct = vec_2_dot_product(mag_2d_w_vec[1],mag_2d_w_vec[0]);
//若反向,直接给最大误差
if(mag_err_dot_prudoct<0)
{
mag_yaw_err = my_sign(mag_yaw_err) *1.0f;
}
//
}
#endif
for(u8 i = 0;i<3;i++)
{
//(这个没用)
#ifdef USE_EST_DEADZONE
if(state->G_reset == 0 && state->obs_en == 0)
{
vec_err[i] = my_deadzone(vec_err[i],0,imu->gacc_deadzone[i]);
}
#endif
//(用了这个,这里是利用加速度模长判断,如果水平方向加速度太大,就不能直接把加速度数据看作重力加速度数据,这一轮计算的偏差清零不补偿了)
#ifdef USE_LENGTH_LIM
if(acc_norm_l>1060 || acc_norm_l<900)
{
vec_err[X] = vec_err[Y] = vec_err[Z] = 0;
}
#endif
//误差积分 (用于互补滤波的pi控制器)
vec_err_i[i] += LIMIT(vec_err[i],-0.1f,0.1f) *dT *ki_use;
// 构造增量旋转(含融合纠正)。
// d_angle[X] = (gyr[X] + (vec_err[X] + vec_err_i[X]) * kp_use - mag_yaw_err *imu->z_vec[X] *kmp_use *RAD_PER_DEG) * dT / 2 ;
// d_angle[Y] = (gyr[Y] + (vec_err[Y] + vec_err_i[Y]) * kp_use - mag_yaw_err *imu->z_vec[Y] *kmp_use *RAD_PER_DEG) * dT / 2 ;
// d_angle[Z] = (gyr[Z] + (vec_err[Z] + vec_err_i[Z]) * kp_use - mag_yaw_err *imu->z_vec[Z] *kmp_use *RAD_PER_DEG) * dT / 2 ;
#ifdef USE_MAG
//(用的这个,在普通互补融合滤波基础上增加了磁力计补偿)
d_angle[i] = (gyr[i] + (vec_err[i] + vec_err_i[i]) * kp_use + mag_yaw_err *imu->z_vec[i] *mkp_use) * dT / 2 ;
#else
//(这个没用,普通的互补融合滤波,用加速度计pi控制器输出补偿陀螺仪)
d_angle[i] = (gyr[i] + (vec_err[i] + vec_err_i[i]) * kp_use ) * dT / 2 ;
#endif
}
// 计算姿态(一节龙格库塔法,wxyz初值为1000)
imu->w = imu->w - imu->x*d_angle[X] - imu->y*d_angle[Y] - imu->z*d_angle[Z];
imu->x = imu->w*d_angle[X] + imu->x + imu->y*d_angle[Z] - imu->z*d_angle[Y];
imu->y = imu->w*d_angle[Y] - imu->x*d_angle[Z] + imu->y + imu->z*d_angle[X];
imu->z = imu->w*d_angle[Z] + imu->x*d_angle[Y] - imu->y*d_angle[X] + imu->z;
q_norm_l = my_sqrt_reciprocal(imu->w*imu->w + imu->x*imu->x + imu->y*imu->y + imu->z*imu->z);
imu->w *= q_norm_l;
imu->x *= q_norm_l;
imu->y *= q_norm_l;
imu->z *= q_norm_l;
/修正开关(以下内容不是姿态解算不分析了)
#ifdef USE_MAG
if(state->M_fix_en==0)//磁力
{
mkp_use = 0;//不修正
state->M_reset = 0;//罗盘修正不复位,清除复位标记
}
else
{
if(state->M_reset)//
{
//通过增量进行对准
mkp_use = 10.0f;
if(mag_yaw_err != 0 && ABS(mag_yaw_err)<0.02f)
{
state->M_reset = 0;//误差小于2的时候,清除复位标记
}
}
else
{
mkp_use = state->mkp; //正常修正
}
}
#endif
if(state->G_fix_en==0)//重力方向修正
{
kp_use = 0;//不修正
}
else
{
if(state->G_reset == 0)//正常修正
{
kp_use = state->gkp;
ki_use = state->gki;
}
else//快速修正,通过增量进行对准
{
kp_use = 10.0f;
ki_use = 0.0f;
// imu->est_speed_w[X] = imu->est_speed_w[Y] = 0;
// imu->est_acc_w[X] = imu->est_acc_w[Y] = 0;
// imu->est_acc_h[X] = imu->est_acc_h[Y] =0;
//计算静态误差是否缩小
// imu_reset_val += (ABS(vec_err[X]) + ABS(vec_err[Y])) *1000 *dT;
// imu_reset_val -= 0.01f;
imu_reset_val = (ABS(vec_err[X]) + ABS(vec_err[Y]));
imu_reset_val = LIMIT(imu_reset_val,0,1.0f);
if((imu_reset_val < 0.05f) && (state->M_reset == 0))
{
//计时
reset_cnt += 2;
if(reset_cnt>400)
{
reset_cnt = 0;
state->G_reset = 0;//已经对准,清除复位标记
}
}
else
{
reset_cnt = 0;
}
}
}
}
4、姿态角输出函数函数calculate_RPY()
终于到最后了,这是imu.c中最后一个函数,利用旋转矩阵反解欧拉角,不多解释了,注意避免一下机头垂直向上时的特殊情况就行了(好像是处理陀螺仪死锁问题)
static float t_temp;
void calculate_RPY()
{
///输出姿态角///
t_temp = LIMIT(1 - my_pow(att_matrix[2][0]),0,1);
//imu_data.pit = asin(2*q1q3 - 2*q0q2)*57.30f;
if(ABS(imu_data.z_vec[Z])>0.05f)//避免奇点的运算
{
imu_data.pit = fast_atan2(att_matrix[2][0],my_sqrt(t_temp))*57.30f;
imu_data.rol = fast_atan2(att_matrix[2][1], att_matrix[2][2])*57.30f;
imu_data.yaw = -fast_atan2(att_matrix[1][0], att_matrix[0][0])*57.30f;
}
}
三、参考
- 1. 这里给出出了姿态计算的学习路径,和一些解惑,还是蛮好的
- 2. 这个视频讲的非常清晰,我主要是看这个学的
- 3. 大佬队友的文章,大佬很强解答了我不少问题,文章也值得一看
四、Q&A
- 文章发布后,很多朋友在评论区提出的问题,很感谢大家进行讨论。
- 这里的很多问题应该也是大家关心的,但因为CSDN评论有时候加载不出来,所有把相关讨论搬运到文章中
(1)讨论1
- Q:加速度计和陀螺仪融合那里有处错误,理论值是旋转矩阵第三列,即陀螺仪测算的角速度,不是角速度积分,积分就是角度了
- A:这个地方是把地理系下重力加速度方向转换到机体系下,旋转矩阵是用陀螺仪数据构造的。我想表达的意思是:角速度经过积分和变形得到四元数,构成旋转矩阵,直接说角速度积分确实不太严谨,感谢您指出
(2)讨论2
- Q:我想问一下磁力计计算出sin角之后在融合时为什么要乘Z轴向量
- A:这里不用直接计算sin角。磁力计测算的是地理磁感线(正北方向)在机体坐标系下的投影,把这个矩阵旋转到地理坐标系下,取出南北方向,规格化后和地理系中的正北方向[1,0]叉乘得到偏差。在做叉乘时,两个方向向量的夹角可能太大(就是叉积展开后的那个sin角),所以还要点乘一下判断它们的夹角绝对值是否超过90度。
- Q:讨论2没看懂回答。我的理解是: imu->z_vec[i]是r系z轴在b系三轴的投影,也是r转b系旋转矩阵的第三列。这列的物理意义是:将地理z轴数据转到机体系。 我们补偿的这个误差,其实就是:推导出的正北,与真实正北方向之间的偏离角度。通俗说就是z轴的旋转误差。 所以只需要乘旋转矩阵的第三列。即只转z轴到机体系。 简而言之:z轴误差是在地理系计算的,我们最后得将其转回机体系才能补偿到磁力计数据上。只转Z轴就可以了,所以乘以Z。
- A:是的是的,乘Z是为了变换到机体系。我之前回答的时候只顾着说那个角度了。航向角比较特殊,它的偏差可以很大,所以这里叉乘得到sin后还要按取值范围限制一下,之后乘Z就是为了坐标变换没错。谢谢您的补充
(3)讨论3
- Q:关于
mag_2d_w_vec[1][0]和mag_2d_w_vec[1][1]的含义 - A:这个是这样定义的:
static float mag_2d_w_vec[2][2] = { {1,0},{1,0}};,mag_2d_w_vec[0]就是地理系里的实际正北方向。叉乘那句,就是磁力计测出的南北方向和正北方向的叉乘,来算误差的。
(4)讨论4
- Q:174行
这里是利用加速度模长判断,如果水平方向加速度太大,就不能直接把加速度数据看作重力加速度数据中, 代码是通过加速度的模长超出[900,1060]这个区间才舍掉加速度数据的, 并不是根据’水平方向的加速度太大’而舍弃掉加速度数据的. 不知道我的理解是否正确? - A:这是这里光看代码确实是这样的。不过这里本质上是要避免水平加速度太大导致加速度计数据不准。飞机水平加速度为0时,只有重力加速度,模为9.8(980),就是[900,1600]中点嘛。
- Q:因为
acc_norm的3个分量中包含了飞机本身的加速度和重力加速度分量, 所以应该是’要避免飞机本身在载体系3个方向的加速度太大’ 吧? 因为飞机毕竟会有横滚和俯仰的飞行姿态并同时加速啊. - A:我觉得问题的关键不是加速度有多大,而是这个姿态融合算法进行了这样的假设 “程序假设加速度计测量的就是重力加速度”,它直接用加速度计的数据去融合。如果飞机运动太剧烈,这个假设就不成立了,所以要限制一下
(5)讨论5
- Q:在摘录的本文代码中, 计算出来的去掉重力加速度分量后的机体本身加速度量
a_acc,w_acc,h_acc并没有在后续代码中进一步用到. 这三个量在没被你截取的代码中被用到了么? - A:在pid控制的时候用到了w_acc 和 h_acc,主要用来做速度环反馈
//位置速度环代码节选
LPF_1_(5.0f,dT_ms*1e-3f,imu_data.h_acc[X],vel_fb_d_lpf[X]);
LPF_1_(5.0f,dT_ms*1e-3f,imu_data.h_acc[Y],vel_fb_d_lpf[Y]);
//位置_速度环反馈=上次检测的光流速度+20ms*当前加速度=当前理论速度(20ms为Loc_1level_Ctrl的执行周期)
loc_ctrl_1.fb[X] = OF_DX2 + 0.02f *vel_fb_d_lpf[X];
loc_ctrl_1.fb[Y] = OF_DY2 + 0.02f *vel_fb_d_lpf[Y];
(6)讨论6
- Q:博主,在代码的184~186行, mag_yaw_err前面是’-’, 而在191行, mag_yaw_err前面是’+’. 知道这是什么原因么?
- A:这是匿名写的,我只能猜测一下。这里就是用了一个p控制器修正磁力计偏差,有点像pid控制器,式子里正负号不重要,因为参数mkp_use可以取负值。他那个mkp_use=10.0我不能确定是怎么得到的,如果我来做,我会先试一下100和-100,看看哪个发散了,这样就能确定符号。然后再调到一个合适的值
(7)讨论7
- Q:博主,
calculate_RPY()中的第8,12,14行, 等式右侧的符号是不是搞反了? 是否应该为:imu_data.pit = -asin; imu_data.pit =- fast_atan2; imu_data.yaw =+fast_atan2 - A:emm这个代码我上飞机运行挺稳定的,所以应该没错
- Q:但是这和正文中3. (1) 里面的公式不匹配啊. 能否把代码改成这样, 看飞机运行是否也稳定?
- A:我开程序仔细看了看,这里写成这样没问题,不能改的。
fast_atan()函数原型REAL fast_atan2(REAL y, REAL x),参数可以看成一个点的坐标(写形参(sin(a),cos(a))可以解出a的弧度值)。3.(1)公式中绕三个轴的转角,正方向是按右手螺旋定则确定的,这和匿名规定的欧拉角正方向不同,匿名规定正方向为:pit-仰角;roll-右倾;yaw-右转。以俯仰角为例,此这是绕Y轴的转角θ,对应的欧拉角为pit,pit=-θ,带入参数atan(-sin(θ),cos(θ)),解出的是-θ;其他两个轴同理