- 《Armv8/armv9架构入门指南》-【第十四章】多核处理器
Arm精选
ARM-TEE-Androidarmv8armv9多核处理DSU嵌入式
快速链接:.ARMv8/ARMv9架构入门到精通-[目录]付费专栏-付费课程【购买须知】:联系方式-加入交流群----联系方式-加入交流群个人博客笔记导读目录(全部)
- C语言复习笔记(一维数组)
会飞的CR7
C语言数组一维数组初始化数组元素
数组是一组有序数据的集合,在程序设计中,为方便处理往往会把一些同类型的数据按有序的形式组织起来,且用一个统一的名字标识这组数据,这个名字就称为数组名,构成数组的每一数据称为数组元素或者下标变量。在C语言中,数组属于构造数据类型。一个数组可以包含多个数组元素,这些数组元素可以是基本数据类型或构造类型,按照数组的维数可以分为一维数组和多维数组,按照数组元素的类型,数组又可以分为数值型数组、字符型数组、
- C语言复习笔记6---while循环for循环
.又是新的一天.
C语言复习笔记c语言算法c++
感谢张学长为大家整理的笔记~考点整合A+B问题分离一个整数每一位从后往前从前往后→字符数组(字符串)/看成一堆字符栈(先入后出)→递归while→循环版的if(while循环的直接应用→模拟)gcd和lcm打擂法求max,min判断素数O(n)O(sqrt(n))→分离因子的快捷的求法打印素数表数列求和、斐波那契数列(递推)递推和递归递推往往用迭代(循环)来实现讲从前往后分离整数的递归写法实现方式
- C语言复习笔记5---数组
.又是新的一天.
C语言复习笔记c语言算法c++
数组考点排序冒泡排序O(n^2)选择排序O(n^2)(插入排序)分离每一位正序逆序哈希(hash)→用值直接作为下标日期处理问题数组的基本操作插入和删除逆序(移位)7-19田忌赛马(双指针)二维数组→矩阵矩阵转置判断对称矩阵矩阵运算矩阵移位杨辉三角*知识点数组:存储若干个相同的数据类型的元素intchardoublefloatlonglong定义数组数据类型数组名[数组大小]inta[100];数
- 《沉思录》
froxy
读书笔记程序人生
《沉思录》是古罗马皇帝马可·奥勒留(MarcusAurelius)在戎马倥偬中写下的哲学笔记,也是斯多葛学派的重要代表作。全书以自我对话的形式,探讨了生命、死亡、责任、自然法则以及心灵的安宁。以下是总结与启示:《沉思录》的核心思想总结顺应自然与理性斯多葛哲学认为,宇宙是一个有序的整体,人应遵循自然法则(逻各斯),接受命运的安排。理性是人与神的共通点,通过理性控制欲望和情绪,才能获得内心的自由。专注
- gcc version 11.4.0 (Ubuntu 11.4.0-1ubuntu1~22.04) 上编译问题笔记
老爸我爱你
开发语言c++
编译错误如下:Infileincludedfrom/usr/include/glib-2.0/glib/glib-typeof.h:39,from/usr/include/glib-2.0/glib/gatomic.h:28,from/usr/include/glib-2.0/glib/gthread.h:32,from/usr/include/glib-2.0/glib/gasyncqueue.
- 【论文解读】DSVP:通过动态扩展实现快速探索的双阶段视点规划器
Travis.X
论文解读自动驾驶动态规划人工智能
标题:DSVP:Dual-StageViewpointPlannerforRapidExplorationbyDynamicExpansion作者:HongbiaoZhu,ChaoCao,YukunXia,SebastianScherer,JiZhang,andWeidongWang来源:https://frc.ri.cmu.edu/~zhangji/publications/IROS_2021.
- 【自学笔记】Web3基础知识点总览-持续更新
Long_poem
笔记web3
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档文章目录Web3基础知识点总览(Markdown格式)1.引言2.区块链基础3.智能合约4.去中心化应用(DApps)5.数字货币与钱包6.跨链技术7.Web3生态与工具代码块示例(Solidity智能合约)总结Web3基础知识点总览(Markdown格式)1.引言Web3,也称为第三代互联网或去中心化互联网,旨在通过区块链技术实现更
- MyBatis-plus 2.x -> 3.x 版本升级笔记
三只松鼠@
工作日常springjavasql
参考链接:https://github.com/baomidou/mybatis-plus/issues/32621.官方更新日志升级JDK8+优化性能Wrapper支持lambda语法模块化MP合理的分配各个包结构移除com.baomidou.mybatisplus.extension.injector.methods.additional包下的过时类fix:初始化TableInfo中遇到多个字
- Vue3-笔记002-Ref与Reactive
·焱·
vue3学习笔记笔记vue.jsjavascript
002-Ref与Reactive-目录Refref案例ref与RefifRefshallowReftriggerRefcustomRefdom元素的refReactive与ref的共同点与ref的不同点数组的异步赋值问题readonlyshallowReactivetoReftoRefstoRawRef接受一个内部值并返回一个响应式且可变的ref对象。ref对象仅有一个.valueproperty
- Kotlin的inline、noinline和crossinline关键字
我们间的空白格
androidkotlinandroid
一、inlineinline翻译成中文的意思就是内联,在kotlin里面inline被用来修饰函数,表明当前函数在编译时是以内嵌的形式进行编译的,从而减少了一层函数调用栈:inlinefunfun1(){Log.i("tag","1")}//调用funmainFun(){fun1()}//实际编译的代码funmainFun(){Log.i("tag","1")}这样写的一点好处就是调用栈会明显变浅
- kotlin - inline、noinline、crossinline使用
六毛六66
Kotlin例子kotlinandroid
kotlin-inline、noinline、crossinline使用inline内联函数:用inline关键字标记的函数,避免函数调用的开销,消除Lambda带来的运行时开销noinline禁止内联:一个高阶函数接收了两个或者更多的函数类型的参数,就用加上inline。如果只想内联一个函数,另一个函数就要用noinlinecrossinline:使用crossinline防止非局部返回,关键字
- Microsoft Visual C++ Redistributable 各版本安装包合集
Eric Woo X
C++Windowsmicrosoftc++开发语言
MicrosoftVisualC++Redistributable2019x86:https://aka.ms/vs/16/release/VC_redist.x86.exex64:https://aka.ms/vs/16/release/VC_redist.x64.exeMicrosoftVisualC++Redistributable2017x86:https://go.microsoft.c
- Kotlin内联函数inline、noinline、crossinline
hc.Geng
kotlin开发语言android
高阶函数首先来看下kotlin里的高阶函数定义:如果一个函数接收另一个函数作为参数,或返回类型是一个函数类型,那么该函数被称为是高阶函数。比如下面的代码:privatefunhighFuc(name:String,block:(String)->Unit){block(name)}其中highFuc是函数名,函数中传入了2个参数,第一个参数为String类型,第二个参数即是函数类型,->左边的部分
- Python笔记——DeprecationWarning
小橘猫cate
Pythonpython开发语言
定义如下阶跃函数时出现警告,defstep_function(x):returnnp.array(x>0,dtype=np.int)DeprecationWarning:`np.int`isadeprecatedaliasforthebuiltin`int`.Tosilencethiswarning,use`int`byitself.Doingthiswillnotmodifyanybehavio
- Linux内核srio驱动,Zynq—Linux移植学习笔记(十四):RapidIO驱动开发
weixin_39942572
Linux内核srio驱动
#defineDRIVER_NAME"xiic-rio"#defineSRIO_ZYNQ_BASEADDR0x40000000#defineSRIO_ZYNQ_NODE_BASEADDR0x10100#defineSRIO_ZYNQ_MAX_HOPCOUNT13structxiic_rio{structmutexlock;u8*data;};/*Weneedglobalvarriableforma
- lingo使用笔记(仅入门)
发篇博客骗自己
笔记
lingo使用教程㈠,大致描述(平白无趣的科普)Lingo是一款用于线性规划、整数规划和非线性规划的优化软件。以下是一些常见的Lingo语法和写法的笔记,帮助你快速上手。1.基本结构Lingo模型通常由以下几个部分组成:集合定义:定义模型中使用的集合。数据输入:定义模型中的参数和数据。变量定义:定义决策变量。目标函数:定义优化目标。约束条件:定义模型的约束条件。求解命令:告诉Lingo进行求解。2
- Kubernetes学习笔记-移除Nacos迁移至K8s
人生偌只如初见
KubernetesJ2EEkubernetesk8sjava
项目服务的配置管理和服务注册发现由原先的Nacos全面迁移到Kubernetes上。一、移除Nacos移除Nacos组件依赖。com.alibaba.cloudspring-cloud-starter-alibaba-nacos-discoverycom.alibaba.cloudspring-cloud-starter-alibaba-nacos-configorg.springframewor
- Java基础笔记(小白友好版)
代码什么的真不会呀
java笔记开发语言
Java基础笔记(小白友好版)1.Java简介Java是一种广泛使用的计算机编程语言,由詹姆斯·高斯林(JamesGosling)在1995年创建Java的口号是"一次编写,到处运行"(WriteOnce,RunAnywhere)Java程序需要先编译成字节码(.class文件),然后在Java虚拟机(JVM)上运行主要特点:面向对象:一切皆对象,代码更清晰易懂平台无关性:可以在Windows、M
- 从零至巅:逆向爬虫之道 0_0
蓝花楹下
逆向爬虫爬虫
逆向爬虫-涅槃吾本一介凡鸟,栖于尘世,碌碌无为,浑浑噩噩,如沧海一粟,渺小而无足轻重。然,虽为小雀,心亦怀鸿鹄之志,欲挥羽向天,如凤凰般,翱翔九天,俯瞰苍茫大地。奈何羽翼未丰,学识浅薄,常感力不从心,困于樊笼,不得展翅高飞。然,吾深知,学如逆水行舟,不进则退。故,今执笔为记,以明志,以自勉。愿以此笔记为舟,载吾渡学海,以勤为桨,以思为帆,逐浪前行,终至彼岸。虽前路漫漫,荆棘丛生,然吾心坚定,誓不负
- Ubuntu 系统下如何搭建 ROS 工程
阿斯顿的风格
ubuntulinux运维pythonbash
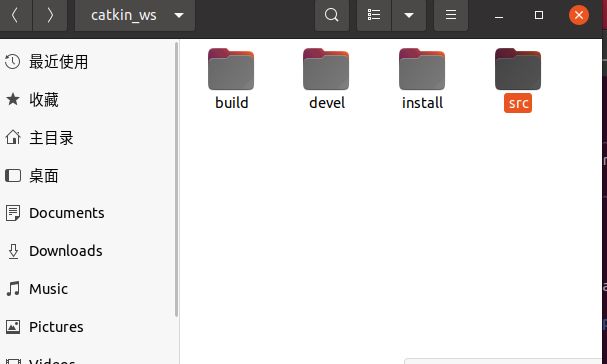
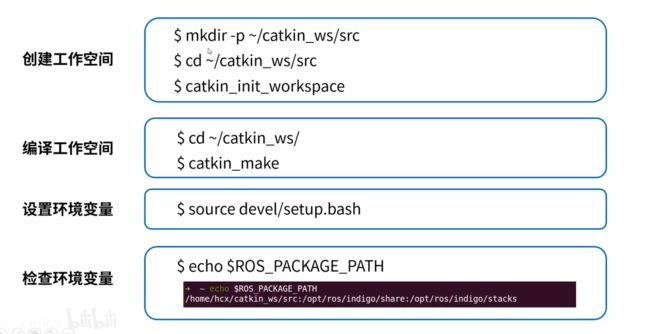
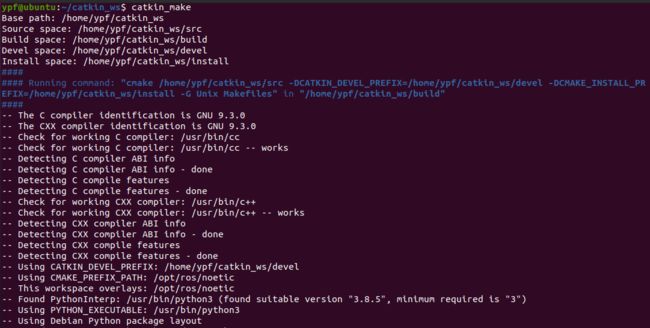
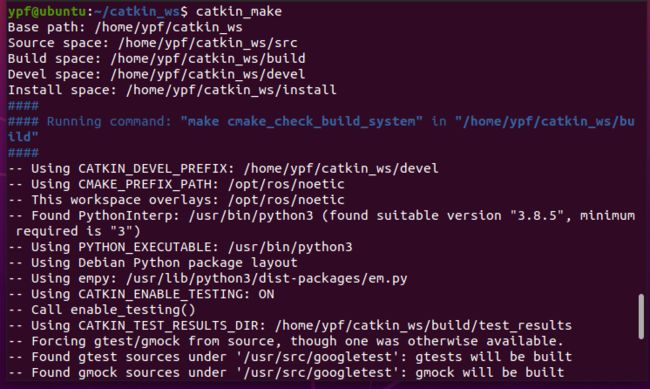
创建Catkin工作空间建立工作空间目录1.打开终端,创建工作空间(例如命名为catkin_ws)及其源代码目录src:mkdir-p~/catkin_ws/srccd~/catkin_ws2.初始化并构建工作空间:在~/catkin_ws目录下执行catkin_make该命令会生成以下目录:build/:保存编译过程中生成的中间文件和构建文件。devel/:开发空间,存放编译后生成的可执行文件、
- roslaunch打开更改gazebo world报错:SpawnModel: Failure - model name mrobot already exist.
阿斯顿的风格
自动驾驶人工智能机器学习
roslaunchmbot_gazeboview_mbot_gazebo_obstacle2.launch...loggingto/home/suifeng/.ros/log/e98b739c-cd05-11ec-9bfc-b0fc364da57d/roslaunch-suifeng-RESCUER-R720-15IKBN-20614.logCheckinglogdirectoryfordisku
- ubuntu20 安装px4、mavros、QGroundControl
jjm2002
ROSgitlinuxubuntubash机器人
一、安装PX4jjm2是我的主文件夹名,可以根据自己的主文件夹名修改下载PX4gitclonehttps://github.com/PX4/PX4-Autopilot.git--recursive由于网速原因,我用的是别人已经下载好的压缩包。链接:https://pan.baidu.com/s/1WskxL3EYWfPUrKDwc3X2Ng提取码:wstc里面有PX4-Autopilot压缩包,l
- ruoyi 小程序使用笔记
万变不离其宗_8
笔记小程序笔记
1.上传图片页面jsimportuploadfrom'@/utils/upload.js'methods:{upload(){constconfig={filePath:this.$refs.imageUploadRetire.files[0].path,url:'/api/common/file/upload'}upload(config).then(res=>{this.form.retire
- 讨论在 Swift 中引入函数体宏
网罗开发
实战SwiftSwift周报swiftssh开发语言
文章目录前言提案通过的提案正在审查的提案Swift论坛话题讨论关于我们前言文章内容精选提案:函数体Macros提案正在审查中Swift论坛:Swift中引入函数体宏话题讨论:你是更能接受同性上司还是更能接受异性上司?上期话题结果投票结果反映,大多数开发者还是比较担心自己的头发,另外就是身体变胖。久坐缺乏运动会导致一系列的身体健康问题。建议大家抽时间多运动,避免久坐。提案通过的提案SE-0411隔离
- 自动驾驶中间件技术辨析:ROS、Apex.Grace、DDS、AutoSAR和AutoSAR Adaptive
赛卡
自动驾驶中间件人工智能
在自动驾驶技术的演进中,中间件作为连接硬件、操作系统与应用软件的核心枢纽,其安全性、实时性和可扩展性至关重要。当前市场上主流的中间件技术包括ROS/ROS2、Apex.Grace(Apex.OS)、DDS、AutoSAR(经典平台CP)和AutoSARAdaptive(自适应平台AP)。这些技术各有特点,但也存在交叉与互补。本文将从功能定位、技术架构、安全认证和应用场景等方面,深入分析它们的联系与
- GS-SLAM论文阅读笔记-MGSO
zenpluck
GS论文阅读论文阅读笔记
前言MGSO首字母缩略词是直接稀疏里程计(DSO),我们建立的光度SLAM系统和高斯飞溅(GS)的混合。这应该是第一个前端用DSO的高斯SLAM,不知道这个系统的组合能不能打得过ORB-SLAM3,以及对DSO会做出怎么样的改进以适应高斯地图,接下来就看一下吧!GishelloG^s_ihelloGishello我是红色文章目录前言1.背景介绍2.关键内容2.1SLAMmodule2.2Dense
- 家用笔记本换装centos7当服务器全流程
吕域
服务器windows电脑centos
目录1、安装centos7系统硬件准备软件和镜像准备制作启动盘2、网络连接和ssh远程登陆centos7连接网络ssh远程登陆3、笔记本闭盖不休眠(7*24小时可用)4、定时开关机(省电、保护电脑)5、配置开发环境(此处以python为例,非必要项,示需求安装)1、安装centos7系统硬件准备老旧淘汰笔记本一台(新笔记本不合算,舍不得)一个大于8G的U盘网线一根(后续联网用)软件和镜像准备软件U
- CentOS 7.x 快速搭建ARK服务器
Aorsion
Linuxarkserverarkservercentos方舟服务器搭建Linux方舟开服教程方舟多人联机
本人菜鸟一枚,最近喜欢上了ark,也找到了2个基友,但是在别的服玩的不是很开心(非人民币玩家,你们懂),刚好有台闲置的拯救者14笔记本,i7-4720HQ、16G内存、128G三星970pro,1T机械,索性拿来装个Centos7.6搭个服自己玩,就多点电费的事,下面把自己折腾一天的开服经历做个笔记留给和我一样的童鞋,喜欢开服工具的请绕道友情提醒:ARK需要大量内存,建议使用至少具有6GBRAM以
- docker-compose笔记
Re_Virtual
dockerdocker笔记容器
docker目前docker官网已经无法登录,但是还可以从清华镜像站(https://mirrors.tuna.tsinghua.edu.cn/docker-ce/)下载。使用方法可以参考早期文章《docker笔记》docker-compose可以从Github下载不同版本的二进制文件,例如docker-compose-linux-x86_64。下载完成后,将二进制文件复制入路径,例如/usr/l
- 深入浅出Java Annotation(元注解和自定义注解)
Josh_Persistence
Java Annotation元注解自定义注解
一、基本概述
Annontation是Java5开始引入的新特征。中文名称一般叫注解。它提供了一种安全的类似注释的机制,用来将任何的信息或元数据(metadata)与程序元素(类、方法、成员变量等)进行关联。
更通俗的意思是为程序的元素(类、方法、成员变量)加上更直观更明了的说明,这些说明信息是与程序的业务逻辑无关,并且是供指定的工具或
- mysql优化特定类型的查询
annan211
java工作mysql
本节所介绍的查询优化的技巧都是和特定版本相关的,所以对于未来mysql的版本未必适用。
1 优化count查询
对于count这个函数的网上的大部分资料都是错误的或者是理解的都是一知半解的。在做优化之前我们先来看看
真正的count()函数的作用到底是什么。
count()是一个特殊的函数,有两种非常不同的作用,他可以统计某个列值的数量,也可以统计行数。
在统
- MAC下安装多版本JDK和切换几种方式
棋子chessman
jdk
环境:
MAC AIR,OS X 10.10,64位
历史:
过去 Mac 上的 Java 都是由 Apple 自己提供,只支持到 Java 6,并且OS X 10.7 开始系统并不自带(而是可选安装)(原自带的是1.6)。
后来 Apple 加入 OpenJDK 继续支持 Java 6,而 Java 7 将由 Oracle 负责提供。
在终端中输入jav
- javaScript (1)
Array_06
JavaScriptjava浏览器
JavaScript
1、运算符
运算符就是完成操作的一系列符号,它有七类: 赋值运算符(=,+=,-=,*=,/=,%=,<<=,>>=,|=,&=)、算术运算符(+,-,*,/,++,--,%)、比较运算符(>,<,<=,>=,==,===,!=,!==)、逻辑运算符(||,&&,!)、条件运算(?:)、位
- 国内顶级代码分享网站
袁潇含
javajdkoracle.netPHP
现在国内很多开源网站感觉都是为了利益而做的
当然利益是肯定的,否则谁也不会免费的去做网站
&
- Elasticsearch、MongoDB和Hadoop比较
随意而生
mongodbhadoop搜索引擎
IT界在过去几年中出现了一个有趣的现象。很多新的技术出现并立即拥抱了“大数据”。稍微老一点的技术也会将大数据添进自己的特性,避免落大部队太远,我们看到了不同技术之间的边际的模糊化。假如你有诸如Elasticsearch或者Solr这样的搜索引擎,它们存储着JSON文档,MongoDB存着JSON文档,或者一堆JSON文档存放在一个Hadoop集群的HDFS中。你可以使用这三种配
- mac os 系统科研软件总结
张亚雄
mac os
1.1 Microsoft Office for Mac 2011
大客户版,自行搜索。
1.2 Latex (MacTex):
系统环境:https://tug.org/mactex/
&nb
- Maven实战(四)生命周期
AdyZhang
maven
1. 三套生命周期 Maven拥有三套相互独立的生命周期,它们分别为clean,default和site。 每个生命周期包含一些阶段,这些阶段是有顺序的,并且后面的阶段依赖于前面的阶段,用户和Maven最直接的交互方式就是调用这些生命周期阶段。 以clean生命周期为例,它包含的阶段有pre-clean, clean 和 post
- Linux下Jenkins迁移
aijuans
Jenkins
1. 将Jenkins程序目录copy过去 源程序在/export/data/tomcatRoot/ofctest-jenkins.jd.com下面 tar -cvzf jenkins.tar.gz ofctest-jenkins.jd.com &
- request.getInputStream()只能获取一次的问题
ayaoxinchao
requestInputstream
问题:在使用HTTP协议实现应用间接口通信时,服务端读取客户端请求过来的数据,会用到request.getInputStream(),第一次读取的时候可以读取到数据,但是接下来的读取操作都读取不到数据
原因: 1. 一个InputStream对象在被读取完成后,将无法被再次读取,始终返回-1; 2. InputStream并没有实现reset方法(可以重
- 数据库SQL优化大总结之 百万级数据库优化方案
BigBird2012
SQL优化
网上关于SQL优化的教程很多,但是比较杂乱。近日有空整理了一下,写出来跟大家分享一下,其中有错误和不足的地方,还请大家纠正补充。
这篇文章我花费了大量的时间查找资料、修改、排版,希望大家阅读之后,感觉好的话推荐给更多的人,让更多的人看到、纠正以及补充。
1.对查询进行优化,要尽量避免全表扫描,首先应考虑在 where 及 order by 涉及的列上建立索引。
2.应尽量避免在 where
- jsonObject的使用
bijian1013
javajson
在项目中难免会用java处理json格式的数据,因此封装了一个JSONUtil工具类。
JSONUtil.java
package com.bijian.json.study;
import java.util.ArrayList;
import java.util.Date;
import java.util.HashMap;
- [Zookeeper学习笔记之六]Zookeeper源代码分析之Zookeeper.WatchRegistration
bit1129
zookeeper
Zookeeper类是Zookeeper提供给用户访问Zookeeper service的主要API,它包含了如下几个内部类
首先分析它的内部类,从WatchRegistration开始,为指定的znode path注册一个Watcher,
/**
* Register a watcher for a particular p
- 【Scala十三】Scala核心七:部分应用函数
bit1129
scala
何为部分应用函数?
Partially applied function: A function that’s used in an expression and that misses some of its arguments.For instance, if function f has type Int => Int => Int, then f and f(1) are p
- Tomcat Error listenerStart 终极大法
ronin47
tomcat
Tomcat报的错太含糊了,什么错都没报出来,只提示了Error listenerStart。为了调试,我们要获得更详细的日志。可以在WEB-INF/classes目录下新建一个文件叫logging.properties,内容如下
Java代码
handlers = org.apache.juli.FileHandler, java.util.logging.ConsoleHa
- 不用加减符号实现加减法
BrokenDreams
实现
今天有群友发了一个问题,要求不用加减符号(包括负号)来实现加减法。
分析一下,先看最简单的情况,假设1+1,按二进制算的话结果是10,可以看到从右往左的第一位变为0,第二位由于进位变为1。
- 读《研磨设计模式》-代码笔记-状态模式-State
bylijinnan
java设计模式
声明: 本文只为方便我个人查阅和理解,详细的分析以及源代码请移步 原作者的博客http://chjavach.iteye.com/
/*
当一个对象的内在状态改变时允许改变其行为,这个对象看起来像是改变了其类
状态模式主要解决的是当控制一个对象状态的条件表达式过于复杂时的情况
把状态的判断逻辑转移到表示不同状态的一系列类中,可以把复杂的判断逻辑简化
如果在
- CUDA程序block和thread超出硬件允许值时的异常
cherishLC
CUDA
调用CUDA的核函数时指定block 和 thread大小,该大小可以是dim3类型的(三维数组),只用一维时可以是usigned int型的。
以下程序验证了当block或thread大小超出硬件允许值时会产生异常!!!GPU根本不会执行运算!!!
所以验证结果的正确性很重要!!!
在VS中创建CUDA项目会有一个模板,里面有更详细的状态验证。
以下程序在K5000GPU上跑的。
- 诡异的超长时间GC问题定位
chenchao051
jvmcmsGChbaseswap
HBase的GC策略采用PawNew+CMS, 这是大众化的配置,ParNew经常会出现停顿时间特别长的情况,有时候甚至长到令人发指的地步,例如请看如下日志:
2012-10-17T05:54:54.293+0800: 739594.224: [GC 739606.508: [ParNew: 996800K->110720K(996800K), 178.8826900 secs] 3700
- maven环境快速搭建
daizj
安装mavne环境配置
一 下载maven
安装maven之前,要先安装jdk及配置JAVA_HOME环境变量。这个安装和配置java环境不用多说。
maven下载地址:http://maven.apache.org/download.html,目前最新的是这个apache-maven-3.2.5-bin.zip,然后解压在任意位置,最好地址中不要带中文字符,这个做java 的都知道,地址中出现中文会出现很多
- PHP网站安全,避免PHP网站受到攻击的方法
dcj3sjt126com
PHP
对于PHP网站安全主要存在这样几种攻击方式:1、命令注入(Command Injection)2、eval注入(Eval Injection)3、客户端脚本攻击(Script Insertion)4、跨网站脚本攻击(Cross Site Scripting, XSS)5、SQL注入攻击(SQL injection)6、跨网站请求伪造攻击(Cross Site Request Forgerie
- yii中给CGridView设置默认的排序根据时间倒序的方法
dcj3sjt126com
GridView
public function searchWithRelated() {
$criteria = new CDbCriteria;
$criteria->together = true; //without th
- Java集合对象和数组对象的转换
dyy_gusi
java集合
在开发中,我们经常需要将集合对象(List,Set)转换为数组对象,或者将数组对象转换为集合对象。Java提供了相互转换的工具,但是我们使用的时候需要注意,不能乱用滥用。
1、数组对象转换为集合对象
最暴力的方式是new一个集合对象,然后遍历数组,依次将数组中的元素放入到新的集合中,但是这样做显然过
- nginx同一主机部署多个应用
geeksun
nginx
近日有一需求,需要在一台主机上用nginx部署2个php应用,分别是wordpress和wiki,探索了半天,终于部署好了,下面把过程记录下来。
1. 在nginx下创建vhosts目录,用以放置vhost文件。
mkdir vhosts
2. 修改nginx.conf的配置, 在http节点增加下面内容设置,用来包含vhosts里的配置文件
#
- ubuntu添加admin权限的用户账号
hongtoushizi
ubuntuuseradd
ubuntu创建账号的方式通常用到两种:useradd 和adduser . 本人尝试了useradd方法,步骤如下:
1:useradd
使用useradd时,如果后面不加任何参数的话,如:sudo useradd sysadm 创建出来的用户将是默认的三无用户:无home directory ,无密码,无系统shell。
顾应该如下操作:
- 第五章 常用Lua开发库2-JSON库、编码转换、字符串处理
jinnianshilongnian
nginxlua
JSON库
在进行数据传输时JSON格式目前应用广泛,因此从Lua对象与JSON字符串之间相互转换是一个非常常见的功能;目前Lua也有几个JSON库,本人用过cjson、dkjson。其中cjson的语法严格(比如unicode \u0020\u7eaf),要求符合规范否则会解析失败(如\u002),而dkjson相对宽松,当然也可以通过修改cjson的源码来完成
- Spring定时器配置的两种实现方式OpenSymphony Quartz和java Timer详解
yaerfeng1989
timerquartz定时器
原创整理不易,转载请注明出处:Spring定时器配置的两种实现方式OpenSymphony Quartz和java Timer详解
代码下载地址:http://www.zuidaima.com/share/1772648445103104.htm
有两种流行Spring定时器配置:Java的Timer类和OpenSymphony的Quartz。
1.Java Timer定时
首先继承jav
- Linux下df与du两个命令的差别?
pda158
linux
一、df显示文件系统的使用情况,与du比較,就是更全盘化。 最经常使用的就是 df -T,显示文件系统的使用情况并显示文件系统的类型。 举比例如以下: [root@localhost ~]# df -T Filesystem Type &n
- [转]SQLite的工具类 ---- 通过反射把Cursor封装到VO对象
ctfzh
VOandroidsqlite反射Cursor
在写DAO层时,觉得从Cursor里一个一个的取出字段值再装到VO(值对象)里太麻烦了,就写了一个工具类,用到了反射,可以把查询记录的值装到对应的VO里,也可以生成该VO的List。
使用时需要注意:
考虑到Android的性能问题,VO没有使用Setter和Getter,而是直接用public的属性。
表中的字段名需要和VO的属性名一样,要是不一样就得在查询的SQL中
- 该学习笔记用到的Employee表
vipbooks
oraclesql工作
这是我在学习Oracle是用到的Employee表,在该笔记中用到的就是这张表,大家可以用它来学习和练习。
drop table Employee;
-- 员工信息表
create table Employee(
-- 员工编号
EmpNo number(3) primary key,
-- 姓