【opencv-python】霍夫变换检测直线原理(累加器法)
参考资料
- 原理动态演示
- 霍夫变换
霍夫变换直线检测原理
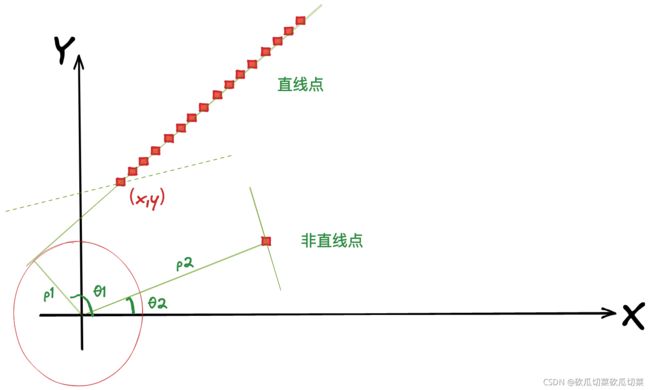
直线可以表达成 y = k x + b y=kx+b y=kx+b的形式,这是用斜率和截距表达出来的。也可以用“点法式”来表示,表示为 c o s ( θ ) ⋅ x + s i n ( θ ) ⋅ y = ρ cos(θ)·x+sin(θ)·y=ρ cos(θ)⋅x+sin(θ)⋅y=ρ的形式,推导过程如链接所示,其中 θ θ θ代表法线方向, ρ ρ ρ代表法线距离。按照这种原理,建立一个二维数组,如下图所示:

其中横轴表示角度,角度间隔反映直线检测分辨率,图中是以1°为间隔,那么直线的法线角度只能精确到1°,如果想要增加分辨率,可以设置为其他间隔角度。纵轴表示原点距离直线的法线长度,理论上一张图像中最长的法线长度就是图像的对角线长度,因此我们可以根据距离精度进行分割,如上图所示距离精度为 L 0 L_0 L0。在建立好这个数组后,我们开始进行霍夫直线检测,数组中每个元素就是一个累加器,每个元素均初始化为0。直线检测流程如下图所示:
当图像进行完二值化之后,对每个点进行搜索,如果 θ θ θ的精度为1°,则从0°开始搜索,将 X 、 Y 、 θ X、Y、θ X、Y、θ值带入到上述点法式直线方程中,可以算出来一个 ρ ρ ρ值,并将 ρ ρ ρ值按照精度等级简化(比如 ρ ρ ρ算出来值为6.4,如果 ρ ρ ρ精度为1°,则自动处理为6)。这样,在遍历角度的直线法线角度θ的过程中,我们可以得到180组形如 ( θ , ρ ) (θ,ρ) (θ,ρ)的数对,将与它们对应点位的元素累加器匹配,并对每个元素进行+1操作。如果这个点在一条直线上,这条直线上第二个点在进行上述操作的时候,必然会在表示这条直线所对应的 ( θ , ρ ) (θ,ρ) (θ,ρ)位置继续累加,以此类推,则累加器数组中最大元素所对应的 ( θ , ρ ) (θ,ρ) (θ,ρ)则必然表示一条直线,至此霍夫直线检测完成。如果把每个累加器的数值表达成深浅强度的形式,则效果如下图所示:
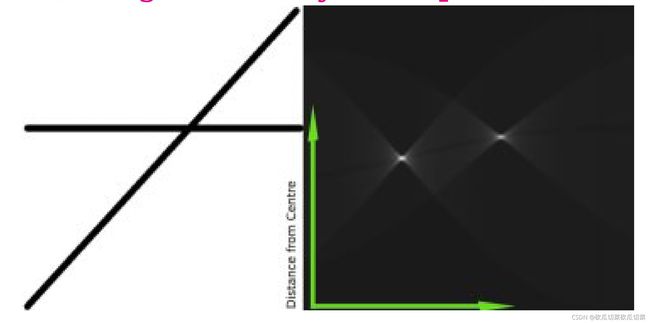
两个亮点所对应的 ( θ , ρ ) (θ,ρ) (θ,ρ)则代表直线。
opencv实现霍夫变换
上面介绍的整个过程都被OpenCV封装成了一个函数cv2.HoughLines()返回值就是 ( θ , ρ ) (θ,ρ) (θ,ρ), θ θ θ单位是弧度、 ρ ρ ρ单位是像素,原版详细说明如下图所示:
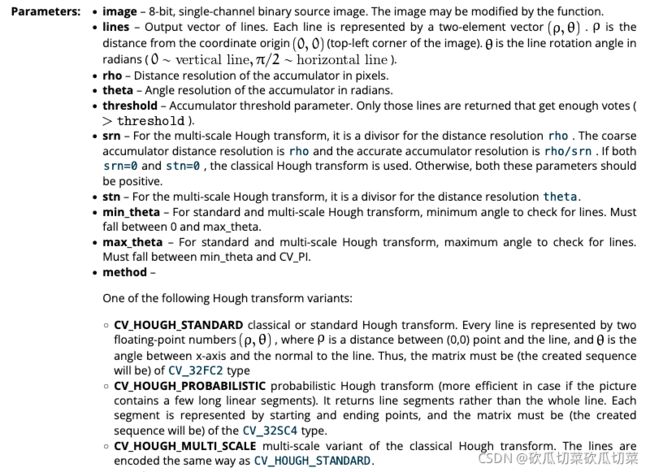
函数参数的含义为:
- image:待处理的图像,注意一定是二值图像;
- lines:直线的输出向量,表达成 ( θ , ρ ) (θ,ρ) (θ,ρ)的形式(垂直线 θ θ θ为0,水平线 θ θ θ为π/2);
- rho:累加器的距离分辨率,单位是像素;
- theta:累加器的角度分辨率,单位是弧度;
- threshold:累加器的阈值参数,累加器只有获得足够的累加和(累加器值>threshold)才会被认为是直线;
- srn:对于多尺度霍夫变换,这个参数表示距离分辨率rho的除数。在执行过程中,粗累加分辨率是rho,而更精确的累加分辨率是rho/srn。如果srn和stn均为0,系统采用传统的霍夫变换算法。否则,这两个参数均应该为正数;
- stn:对于多尺度霍夫变换,这是角度分辨率theta的一个除数;
- min_theta:表示对于标准和多尺度霍夫变换而言检测直线的最小角度,这个数值必须落在0和max_theta之间;
- max_theta:表示对于标准和多尺度霍夫变换而言检测直线的最大角度,这个数值必需落在min_theta和max_theta之间;
- method:代表下列霍夫变换的变体之一:
- CV_HOUGH_STANDARD:代表经典或标准霍夫变换,每条线用两个浮点数 ρ , θ ρ,θ ρ,θ表示,其中 ρ ρ ρ表示原点和这条直线之间的距离, θ θ θ表示代表x轴线和这条直线法线之间的距离。因此,矩阵必须定义为CV_32FC2形式;
- CV_HOUGH_PROBABILISTIC:概率霍夫变换是更有效果一些的(如果图像包括一些长直线段)。将返回直线段而不是整个直线。每段由起点和终点表示,每个矩阵必需为CV_32SC4形式;
- CV_HOUGH_MULTI_SCALE:对经典霍夫变换的多尺度变体。直线编码表达的形式和CV_HOUGH_STANDARD相同。
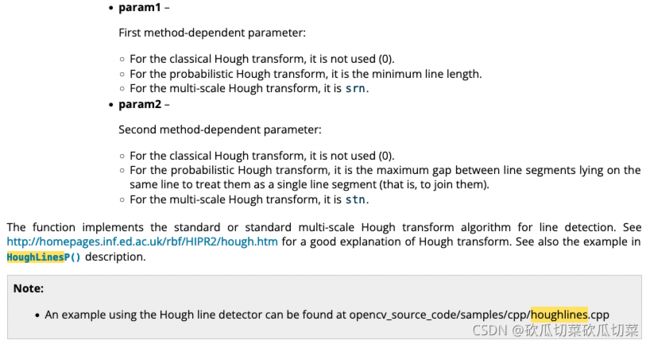
- 可选参数1:代表第一个可选独立参数:
- 对于经典霍夫变换,这个参数是没用的(0);
- 对于概率霍夫变换,这个参数值是最小线长度;
- 对于多尺度霍夫变换,这个参数值是srn;
- 可选参数2:代表第二个可选独立参数:
- 对于经典霍夫变换,这个参数是没用的(0);
- 对于概率霍夫变换,这个代表同一条直线上线段之间的最大间距,如果小于这个最大间距,两条线将被视为同一条直线;
- 对于多尺度霍夫变换,这个参数值是stn;
总之,面向直线检测,本函数适用于标准和标准多尺度霍夫变换算法。
案例分析
我们跑一个实例,比如下面这张田字格的图片,我们试图把田字格的行列直线全部提取出来,原图如下图所示:
写一个简单的霍夫变换直线检测程序,代码如下图所示:
img = cv2.imread('squares.jpg')
l0 = img.shape
print('l0:', l0[0])
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
edges = cv2.Canny(gray,50,200,apertureSize = 3)
lines = cv2.HoughLines(edges,1,np.pi/180,300)
print('lines', lines[0], type(lines), lines.shape)
for line in lines:
for rho,theta in line:
a = np.cos(theta)
b = np.sin(theta)
x0 = a*rho
y0 = b*rho
x1 = int(x0 + 1000*(-b))
y1 = int(y0 + 1000*(a))
x2 = int(x0 - 1000*(-b))
y2 = int(y0 - 1000*(a))
cv2.line(img,(x1,y1),(x2,y2),(0,0,255),3)
self.show_img(edges, 'canny')
self.show_img(img,'results')
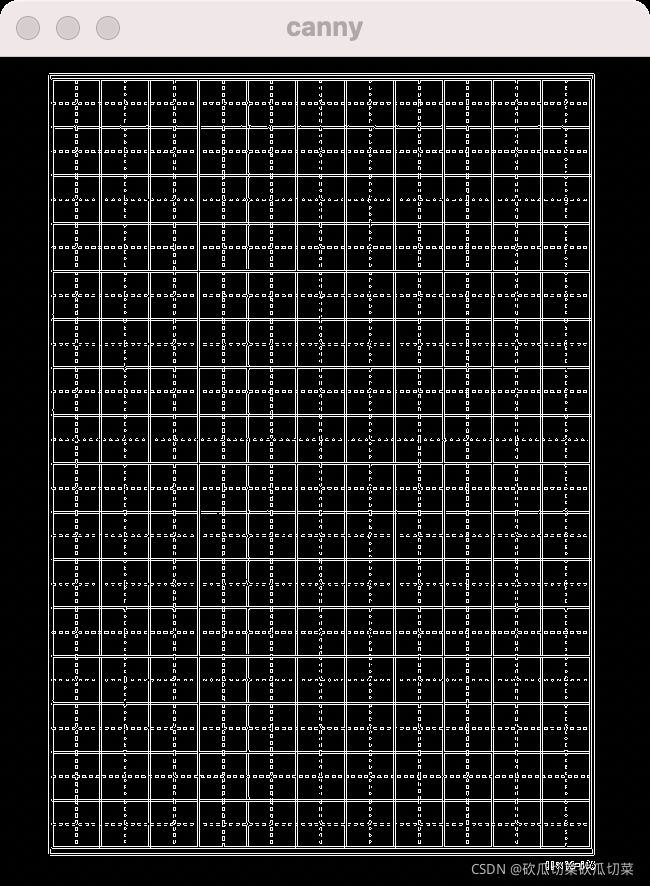
注意霍夫变换函数的输入一定是二值图像,此处我们利用原图的Canny边缘检测函数或者图片的边缘图像,Canny边缘检测效果如下图所示:
最终霍夫变换直线检测结果如下图所示:
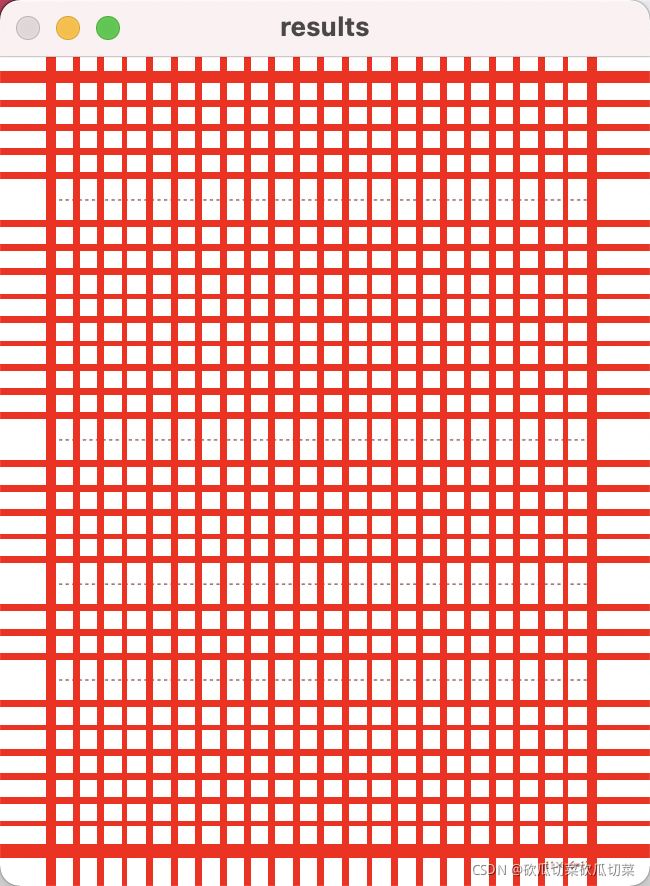
可以调整程序中的部分参数改变运行结果中的直线间距、粗细、分辨率断点等信息,欢迎大家进群深入交流。