手撕BP网络,你值得拥有!

本文货很干,自己挑的文章,含着泪也要读完!
一、认识BP神经网络
BP网络(Back-ProPagation Network)又称反向传播神经网络,分为两个过程:(1)工作信号正向传递子过程;(2)误差信号反向传递子过程。 通过样本数据的训练,不断修正网络权值和阈值使误差函数沿负梯度方向下降,逼近期望输出。它是一种应用较为广泛的神经网络模型,多用于函数逼近、模型识别分类、数据压缩和时间序列预测等。
其实,BP神经网络就是一个“万能的模型+误差修正函数”,每次根据训练得到的结果与预想结果进行误差分析,进而修改权值和阈值,一步步得到输出和与预想结果一致的模型。举个例子:比如我们给客户开发出一个软件产品,根据客户的反馈,开发者对产品进一步升级和优化,从而交付出让用户更满意的产品,这就是BP神经网络的核心。
下面就让我们看看BP网络到底是什么东西?
在BP神经网络中,单个样本有![]() 个输入,有
个输入,有![]() 个输出,在输入层和输出层之间通常还有若干个隐含层。实际上,1989年Robert Hecht-Nielsen证明了对于任何闭区间内的一个连续函数都可以用一个隐含层的BP网络来逼近,这就是万能逼近定理。所以一个三层的BP网络就可以完成任意的
个输出,在输入层和输出层之间通常还有若干个隐含层。实际上,1989年Robert Hecht-Nielsen证明了对于任何闭区间内的一个连续函数都可以用一个隐含层的BP网络来逼近,这就是万能逼近定理。所以一个三层的BP网络就可以完成任意的![]() 维到
维到 维的映射。即这三层分别是输入层(I),隐含层(H),输出层(O),隐含层的个数+输出层的个数=神经网络层数,也就是说神经网络的层数不包括输入层。如下图示:
维的映射。即这三层分别是输入层(I),隐含层(H),输出层(O),隐含层的个数+输出层的个数=神经网络层数,也就是说神经网络的层数不包括输入层。如下图示:

二、神经网络结构
2.1神经元模型
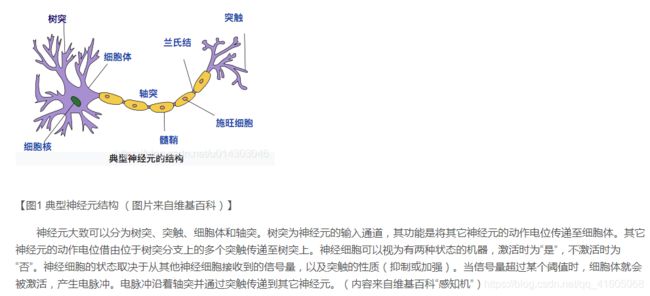
2.2神经网络中的神经元
神经网络中的神经元就是为了模拟上述过程,典型的神经元模型如下:

三、BP算法的推导
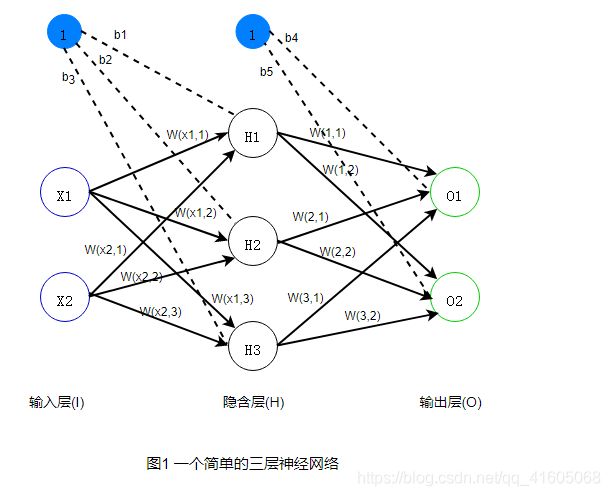
图1所示是一个简单的三层(一个输入层、一个隐含层、一个输出层)神经网络结构。
: 表示a神经元与b神经元的权重
: 表示第n个神经元的偏差
3.1前向传播计算
3.1.1网络参数
输入数据:
![]()
激活函数:
第一层网络参数:
![W^{(1)}=\begin{bmatrix} w_{(x_{1},1)} &w_{(x_{2},1)} \\ w_{(x_{1},2)}& w_{(x_{2},2)} \\ w_{(x_{1},3)}& w_{(x_{2},3)} \end{bmatrix},b^{(1)}=[b_{1},b_{2},b_{3}]](http://img.e-com-net.com/image/info8/256026ed2a2440df88bebefe1ddfa000.gif)
第二层网络参数:
![]()
3.1.2隐含层公式推导
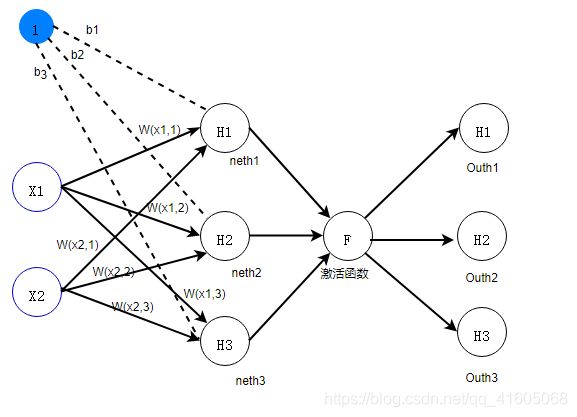
如图所示,隐含层有三个神经元:![]() 、
、![]() 、
、![]() ,
,
该层的输入为:![]() ,
,
即:
矩阵运算传送门:https://blog.csdn.net/qq_41605068/article/details/117449252
以![]() 神经元为例:
神经元为例:
其输入为:![]()
同理有:![]() ,
, ![]()
假设选择![]() 作为该层的激活函数(同一层的激活函数都是一样的,不同层可以选择不同的激活函数),那么该层的输出为:
作为该层的激活函数(同一层的激活函数都是一样的,不同层可以选择不同的激活函数),那么该层的输出为:![]() ,
, ![]() ,
,
3.1.3输出层公式推导

如图所示,输出层有两个神经元:![]() ,
, ![]() ,该层的输入为:
,该层的输入为:![]()
以![]() 神经元为例:
神经元为例:
其输入为:![]()
同理有:![]()
假设选择![]() 作为该层的激活函数(同一层的激活函数都是一样的,不同层可以选择不同的激活函数),那么该层的输出为:
作为该层的激活函数(同一层的激活函数都是一样的,不同层可以选择不同的激活函数),那么该层的输出为:![]() ,
, 
3.2反向传播计算
- 反向传播推导
- 一文彻底搞懂BP算法
- AI从入门到放弃
3.2.0前提
1.损失函数和代价函数
损失函数主要指的是对于单个样本的损失或误差;
代价函数表示多样本同时输入模型的时候总体的误差——每个样本误差的和然后取平均值。
在BP神经网络中,误差信号反向传递子过程比较复杂,它是基于Widrow-Hoff学习规则的,假设输出层的所有结果为![]() ,使用误差函数如下:
,使用误差函数如下:
![]() ,其中taeget为期望输出,output为实际输出。
,其中taeget为期望输出,output为实际输出。
而BP神经网络的主要目的是反复修正权值和阈值,使得误差函数达到最小,Widrow-Hoff学习规则是通过沿着相对误差平方和的最快下降方向,连续调整网络的权值和阈值,从而减少系统实际输出和期望输出的误差,这个规则也叫纠错学习规则。
2.梯度下降法原理
梯度矩阵(向量)求出来的意义是什么?从几何意义讲,梯度矩阵代表了函数增加最快的方向,因此,沿着与之相反的方向就可以更快找到最小值。如图所示:

梯度的输出变量表明了在每个位置损失函数增长最快的方向,它可表示为在函数的每个位置向哪个方向移动,函数值可以增长,梯度就是表明损失函数相对参数的变化率,对梯度进行缩放的参数就是学习率

如图,曲线对应于损失函数,点表示权值,梯度用箭头表示,表明了如果向右移动,就会增加损失,函数值就会增加多少,如果向反方向移动,损失就会减少。
反向传播的过程就是利用梯度下降法原理,慢慢的找到代价函数的最小值,从而得到最终的模型参数。
3.2.1输出层->隐含层【公式推导】
以w5为例:

如果我们想知道w5对整体误差产生了多少影响,可以用整体误差对w5求偏导求出:(链式法则:传送门)
![]()
- 计算
 :因为
:因为 只会接受
只会接受 ,所以
,所以 对求导为:
对求导为:
- 计算
 :
:
因为激活函数为:
,即求激活函数的导数(通过复合函数求导:传送门):![]() ,此时,将该结果进行变形:
,此时,将该结果进行变形:![]()
所以:![]()
- 计算
 :
:
 ,对
,对![]() 求导:
求导:![]()
【结论】所以:![]() 三者相乘,得:
三者相乘,得:
![]()
为了表达方便,我们用![]() 表示输出层误差:
表示输出层误差:
![]()
所以:
![]() ,若为负,则
,若为负,则![]()
【权值更新】:
![]() (其中,
(其中,![]() 为学习速率)
为学习速率)
【偏差更新】
![]() (其中,
(其中,![]() 为学习速率)
为学习速率)
3.2.2隐含层->输入层【公式推导】
以W1为例:

计算公式:![]() ,因为
,因为![]() 会同时接受
会同时接受![]() 和
和![]() ,所以该公式中的
,所以该公式中的![]() ,求解过程如上所示。
,求解过程如上所示。
四、模型建立
4.1输入输出层设计
根据需求自行设定。
4.2权值初始化
4.2.1权重初始化的重要性
- 神经网络的训练过程中的参数学习时基于梯度下降算法进行优化的。梯度下降法需要在开始训练时给每个参数赋予一个初始值。这个初始值的选取十分重要。在神经网络的训练中如果将权重全部初始化为0,则第一遍前向传播过程中,所有隐藏层神经元的激活函数值都相同,导致深层神经元可有可无,这一现象称为对称权重现象。
- 为了打破这个平衡,比较好的方法是对每层的权重都进行随机初始化,这样使得不同层的神经元之间有很好的区分性。但是,随机初始化参数的一个问题是如何选择随机初始化的区间。如果权重初始化太小,会导致神经元的输入过小,随着层数的不断增加,会出现信号消失的问题;也会导致sigmoid激活函数丢失非线性的能力,因为在0附件sigmoid函数近似是线性的。如果参数初始化太大,会导致输入状态太大。对sigmoid激活函数来说,激活函数的值会变得饱和,从而出现梯度消失的问题。
4.2.2常用的参数初始化方法
- 高斯分布初始化:参数从一个固定均值(比如0)和固定方差(比如0.01)的高斯分布进行随机初始化。
- 均匀分布初始化:在一个给定的区间[-r,r]内采用均匀分布来初始化参数。超参数r的设置可以按照神经元的连接数量进行自适应的调整。
- 初始化一个深层神经网络时,一个比较好的初始化策略是保持每个神经元输入和输出的方差一致。
4.3隐含层设计
原理:有一个隐层的神经网络, 只要隐节点足够多, 就可以以任意精度逼近一个非线性函数。
注意:在网络设计过程中, 隐层神经元数的确定十分重要。隐层神经元个数过多, 会加大网络计算量并容易产生过度拟合问题; 神经元个数过少, 则会影响网络性能, 达不到预期效果。网络中隐层神经元的数目与实际问题的复杂程度、输入和输出层的神经元数以及对期望误差的设定有着直接的联系。目前, 对于隐层中神经元数目的确定并没有明确的公式, 只有一些经验公式, 神经元个数的最终确定还是需要根据经验和多次实验来确定。
本文在选取隐层神经元个数的问题上参照了以下的经验公式:
 (n为输入层神经元个数, m 为输出层神经元个数, a 为[ 1, 10]之间的常数。)
(n为输入层神经元个数, m 为输出层神经元个数, a 为[ 1, 10]之间的常数。)
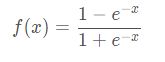
4.4激活函数的选取
BP神经网络通常采用Sigmoid可微函数和线性函数作为网络的激励函数。本文选择S型正切函数tansig作为隐层神经元的激励函数。如果网络的输出归一到[ -1, 1]范围内, 因此预测模型选取S 型对数函数tansig作为输出层神经元的激励函数。
激活函数: 就是在神经网络的神经元上运行的函数,负责将神经元的输入映射到输出端。
激活函数的作用: 激活函数对于深度学习来说非常的重要,我们假设现在有n个神经元x1,...,xn,其参数为w1,...,wn,偏值为b。
 其中f为激活函数。
其中f为激活函数。 我们可以发现如果没有激活函数的话,那么神经网络就变成了线性函数的不断嵌套,对于非线性关系学习不好。
我们可以发现如果没有激活函数的话,那么神经网络就变成了线性函数的不断嵌套,对于非线性关系学习不好。
激活函数需要的性质:
- 连续可导的非线性函数,这样可以拟合非线性关系还可以用数值优化求解。
- 激活函数及其导数其形式必须简单,这样加快网络的学习。
- 激活函数的导数不能太大或者太小,最好稳定在1左右。太大会梯度爆炸,太小会梯度消失。
如果不用激励函数(其实相当于激励函数是f(x) = x),在这种情况下你每一层输出都是上层输入的线性函数,很容易验证,无论你神经网络有多少层,输出都是输入的线性组合,与没有隐藏层效果相当,这种情况就是最原始的感知机(Perceptron)了。 正因为上面的原因,我们决定引入非线性函数作为激励函数,这样深层神经网络就有意义了(不再是输入的线性组合,可以逼近任意函数)。最早的想法是sigmoid函数或者tanh函数,输出有界,很容易充当下一层输入(以及一些人的生物解释balabala)。
常见的激活函数包括:
- Sigmoid
- TanHyperbolic(tanh)
- ReLu
- softplus
- softmax
- ELU
- PReLU
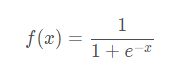
比如Sigmoid:
常用的Sigmoid型函数有两种,第一个是logistic函数,第二个是tanh函数。这两个函数都是连续可导的,并且导数都不大,所以性质比较好,但是缺点在于他们都是两端饱和的,导数趋近于0。
- 单极性logistic函数
定义:
导数为:

函数曲线如下图所示:
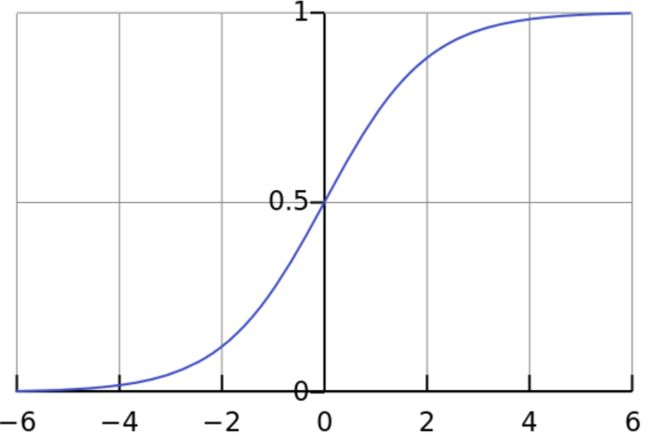
logistic函数是一个挤压函数,将实数域的输入转换为 ( 0 , 1 ) (0,1) (0,1)区间内的输出。当输入值接近0的时候,其趋近于线性函数,当输入之接近两侧无穷的时候,它是饱和的(导数为0)。
logistic函数的输出可以认定是一个概率分布;其可以看作是一个软性门来控制神经元输入的信息数量。
2.双极性Tanh函数
定义:
tanh函数也是一个挤压函数,将实数域的输入转换到 ( − 1 , 1 ) (-1,1) (−1,1)区间内。它的输出是零均值的,所以在梯度下降法的应用中,Tanh函数的收敛速度更快。

4.5损失函数的选取
- 参考1
泛化性:表示BP神经网络在训练过程中,如果均方误差(MSE)连续6次不降反升,则网络停止训练。
误差精度: 关于mu参数含义的一种理解是,mu是误差精度参数,用于给神经网络的权重再加一个调制,这样可以避免在BP网络训练的过程中陷入局部最小值,mu的范围为0到1,即偏差。
PS: 这里我要说的是,用这个作为误差的计算,因为它简单,实际上用的时候效果不咋滴。如果激活函数是饱和的,带来的缺陷就是系统迭代更新变慢,系统收敛就慢,当然这是可以有办法弥补的,一种方法是使用交叉熵函数作为损失函数。
交叉熵做为代价函数能达到上面说的优化系统收敛下欧工,是因为它在计算误差对输入的梯度时,抵消掉了激活函数的导数项,从而避免了因为激活函数的“饱和性”给系统带来的负面影响。如果项了解更详细的证明可以点 --> 传送门
4.6设计原则
- 激活函数:
(可参考:https://blog.csdn.net/qq_41605068/article/details/118102576)
- 学习率:0<η<1
- 停止准则:网络的均方误差足够小或者训练足够的次数等
- 初始权值:以均值等于0的均匀分布随机挑选突触权值
- 隐层结构:
![]()
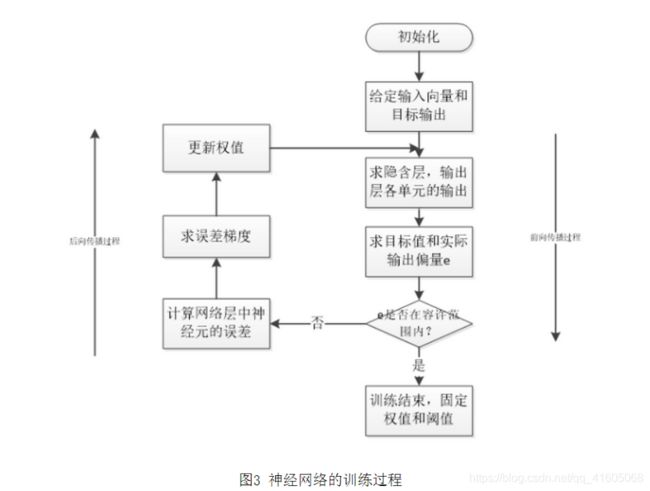
- 训练过程:如图3
1.初始化网络的突触权值和阈值矩阵;
2.训练样本的呈现;
3.前向传播计算;
4.误差反向传播计算并更新权值;
5.迭代,用新的样本进行步骤3和4,直至满族停止准则;

- 参考1
- 参考2
- 参考3
五、后续
关于超参数:
通过前面的介绍,相信读者可以发现BP神经网络模型有一些参数是需要设计者给出的,也有一些参数是模型自己求解的。
那么,哪些参数是需要模型设计者确定的呢?
比如,学习率 α \alpha α,隐含层的层数,每个隐含层的神经元个数,激活函数的选取,损失函数(代价函数)的选取等等,这些参数被称之为超参数。
其它的参数,比如权重矩阵 w w w和偏置系数 b b b在确定了超参数之后是可以通过模型的计算来得到的,这些参数称之为普通参数,简称参数。
超参数的确定其实是很困难的。因为你很难知道什么样的超参数会让模型表现得更好。比如,学习率太小可能造成模型收敛速度过慢,学习率太大又可能造成模型不收敛;再比如,损失函数的设计,如果损失函数设计不好的话,可能会造成模型无法收敛;再比如,层数过多的时候,如何设计网络结构以避免梯度消失和梯度爆炸……
神经网络的程序比一般程序的调试难度大得多,因为它并不会显式报错,它只是无法得到你期望的结果,作为新手也很难确定到底哪里出了问题(对于自己设计的网络,这种现象尤甚,我目前也基本是新手,所以这些问题也在困扰着我)。
当然,使用别人训练好的模型来微调看起来是一个捷径……
BP神经网络的注意点:
BP神经网络一般用于分类或者逼近问题。如果用于分类,则激活函数一般选用Sigmoid函数或者硬极限函数,如果用于函数逼近,则输出层节点用线性函数,即![]() 。BP神经网络在训练数据时可以采用增量学习或者批量学习。
。BP神经网络在训练数据时可以采用增量学习或者批量学习。
增量学习要求输入模式要有足够的随机性,对输入模式的噪声比较敏感,即对于剧烈变化的输入模式,训练效果比较差,适合在线处理。
批量学习不存在输入模式次序问题,稳定性好,但是只适合离线处理。
标准BP神经网络的缺陷:
(1)容易形成局部极小值而得不到全局最优值。 BP神经网络中极小值比较多,所以很容易陷入局部极小值,这就要求对初始权值和阀值有要求,要使得初始权值和阀值随机性足够好,可以多次随机来实现。
(2)训练次数多使得学习效率低,收敛速度慢。
(3)隐含层的选取缺乏理论的指导。
(4)训练时学习新样本有遗忘旧样本的趋势。
BP算法的改进:
(1)增加动量项:引入动量项是为了加速算法收敛,即如下公式 ![]() ,动量因子
,动量因子![]() 一般选取
一般选取![]() 。
。
(2)自适应调节学习率。
(3)引入陡度因子:通常BP神经网络在训练之前会对数据归一化处理,即将数据映射到更小的区间内,比如[0,1]或[-1,1]。