Halcon 3D点云和深度图的相互转化
3D点云和深度图
- 1. 如何将灰度图转为3D点云
- 2. 创建一张深度图
- 3. 深度图转点云、点云转深度图
- 4. 代码和图片下载地址
1. 如何将灰度图转为3D点云
- 这里所说的灰度图转为3D点云,其实是将灰度图像每个像素的行列坐标作为3D点云的X,Y坐标,像素的灰度值(0—255)作为三维点的Z坐标。
- 简单说就是将一张灰度图像拆成了三个数组:X,Y,Z,然后将这三个数组转为点云。
halcon代码:
dev_get_window (WindowHandle)
read_image (Image, '1.bmp')
rgb1_to_gray (Image, GrayImage)
*获取图像尺寸
get_image_size (GrayImage, Width, Height)
gen_rectangle1 (Rectangle, 0, 0, Height-1,Width-1)
*从区域生成所有的像素坐标
get_region_points(Rectangle, X, Y)
*读取图像的全部像素
get_grayval(GrayImage, X, Y, Z)
*创建3D对象模型
gen_object_model_3d_from_points(X, Y, Z, ObjectModel3D)
*显示3D模型
visualize_object_model_3d (WindowHandle,ObjectModel3D , [], [], [], [], [], [], [], PoseOut)
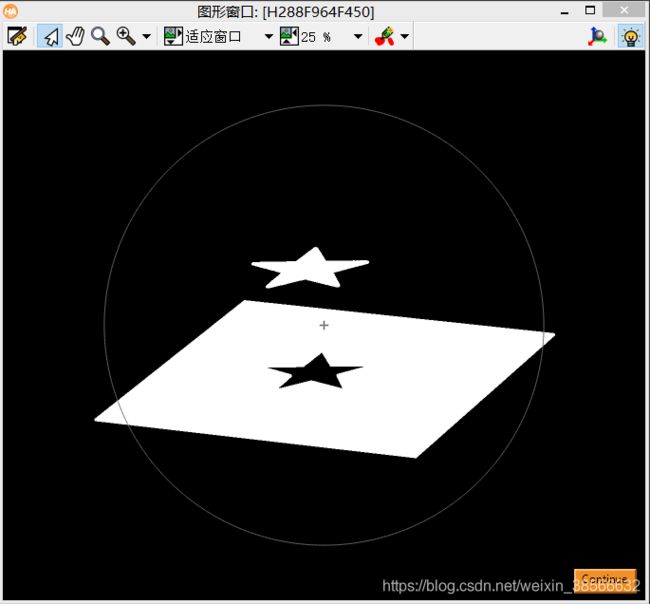
2. 创建一张深度图
- 实际上深度图是使用X,Y,Z三个数组的数据创建来的;
- X,Y是作为图像的行列坐标,Z是实数(表示的是深度/高度),而不是灰度,因为灰度值是0——255之间的整数;
- Z的值是能够返回高度信息的传感器获取到的,比如点激光、线激光,结构光等。
- 下面是自己赋值得到的一张深度图。

dev_get_window (WindowHandle)
read_image (Image, '2.bmp')
rgb1_to_gray (Image, GrayImage)
*获取图像尺寸
get_image_size (GrayImage, Width, Height)
gen_rectangle1 (Rectangle, 0, 0, Height-1,Width-1)
*从区域生成所有的像素坐标
get_region_points(Rectangle, X, Y)
*读取图像的全部像素
get_grayval(GrayImage, X, Y, Z)
*改变Z的值
Z:=Z-256
*对在Rectangle2区域中的像素进行赋值
gen_rectangle1 (Rectangle2, 101, 101, 140,140)
get_region_points(Rectangle2, X2, Y2)
Z[X2*400+Y2]:=2.4
*创建一张类型为'real'的图像
gen_image_const (ImageConst, 'real', Width, Height)
*使用X,Y,Z给图像赋值A
set_grayval (ImageConst, X, Y, Z)
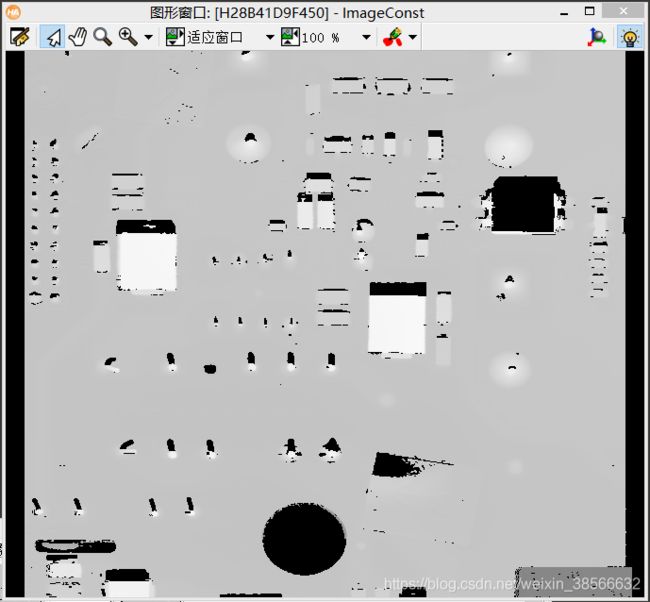
3. 深度图转点云、点云转深度图
- 接下来我们加载一张真正的深度图,它是由线激光采集数据得到的,保存格式为tiff文件;
- 这是截取了其中一段图像,扫描的是电路板上一些元器件和焊点的高度。
read_image (Image, '3DImage1.tiff')
get_image_size (Image, Width, Height)
*1. 这一步是将灰度图转为了X,Y,Z三个数组,当然也就可以转为三位点云了
*获取图像尺寸
get_image_size (Image, Width, Height)
gen_rectangle1 (Rectangle, 0, 0, Height-1,Width-1)
*从区域生成所有的像素坐标
get_region_points(Rectangle, X, Y)
*读取图像的全部像素
get_grayval(Image, X, Y, Z)
*2. 再将X,Y,Z这三个数组转回深度图,实际应用中,线机光返回的数据就是Z数组,X,Y数组由自己创建
*创建一个空图像,注意type选择'real'
gen_image_const (ImageConst, 'real', Width, Height)
*然后使用数组填充图像,这样就完成了
set_grayval (ImageConst, X, Y, Z)
*3. 接下来就可以对深度图做进一步处理了。。。
4. 代码和图片下载地址
https://download.csdn.net/download/weixin_38566632/19765495