【古月21讲】ROS入门系列(4)——参数使用与编程方法、坐标管理系统、tf坐标系广播与监听的编程实现、launch启动文件的使用方法
文章目录
-
- 1、参数的使用与编程方法
- 2、ROS中的坐标管理系统
- 3、tf坐标系广播与监听的编程实现
- 4、launch启动文件的使用方法
1、参数的使用与编程方法
-
创建功能包
cd ~/catkin_ws/src catkin_create_pkg learning_parameter roscpp rospy std_srvs -
相关参数命令使用
-
rosparam list列出当前所有参数

注意上图红色框图部分,这里可能和ROS入门21讲中的不一样,在代码中相应的调整。
-
rosparam get param_key显示某个参数值
-
rosparam set param_key param_value设置某个参数值
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-L9kbHIkj-1638178249144)(C:\Users\WSJ\AppData\Roaming\Typora\typora-user-images\image-20211126172107463.png)]](http://img.e-com-net.com/image/info8/3f5bf1e3913448cd9acc5a5d60951768.jpg)
这里我们通过set设置/turtlesim/background_b参数的值为100,后面通过get命令发现参数的值确实变成了100。
这里我们可以通过调用/clear服务让海龟进程背景发生变化,命令及变化效果如下:rosservice call /clear "{}"
-
rosparam dump file_name保存参数到文件 -
rosparam load file_name从文件读取参数 -
rosparam load file_name删除参数
-
-
编程实现控制海龟例程背景参数设计(C++) ——文件名为parameter_config.cpp
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************/
/**
* 该例程设置/读取海龟例程中的参数
*/
#include 总结上面获取、设置参数的编程过程如下:
- 初始化ROS节点
- get函数获取参数
- set函数设置参数
-
配置代码编译规则
-
设置需要编译的代码和生成的可执行文件
add_executable(parameter_config src/parameter_config.cpp) -
设置链接库
target_link_libraries(parameter_config ${catkin_LIBRARIES})
-
-
编译并运行
cd ~/catkin_ws catkin_make roscore rosrun turtlesim turtlesim_node rosrun learning_parameter parameter_config运行的效果如下:
2、ROS中的坐标管理系统
该部分在运行时错误较多,下面这篇博客写的极为详细,这里偷个懒,博客链接如下:
ROS中的坐标管理系统
3、tf坐标系广播与监听的编程实现
-
创建功能包
cd ~/catkin_ws/src catkin_create_pkg learning_tf roscpp rospy tf turtlesim -
创建tf广播器代码(C++) ——文件名为turtle_tf_broadcaster.cpp
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************/
/**
* 该例程产生tf数据,并计算、发布turtle2的速度指令
*/
#include 总结上述实现一个tf广播器的步骤:
- 定义TF广播器
- 创建坐标变换值
- 发布坐标变换
- 创建tf监听器代码(C++) ——文件名为turtle_tf_listener.cpp
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************/
/**
* 该例程监听tf数据,并计算、发布turtle2的速度指令
*/
#include 总结上述实现一个TF监听器的步骤
-
定义TF监听器
-
查找坐标变换
- 配置tf广播器与监听器代码编译规则
add_executable(turtle_tf_broadcaster src/turtle_tf_broadcaster.cpp)
target_link_libraries(turtle_tf_broadcaster ${catkin_LIBRARIES})
add_executable(turtle_tf_listener src/turtle_tf_listener.cpp)
target_link_libraries(turtle_tf_listener ${catkin_LIBRARIES})
- 编辑并运行
cd ~/catkin_ws
catkin_make
roscore
rosrun turtlesim turtlesim_node
rosrun learning_tf turtle_tf_broadcaster __name:=turtle1_tf /turtle1
rosrun learning_tf turtle_tf_broadcaster __name:=turtle2_tf /turtle2
rosrun learning_tf turtle_tf_listener
rosrun turtlesim turtle_teleop_key
运行结果如下:

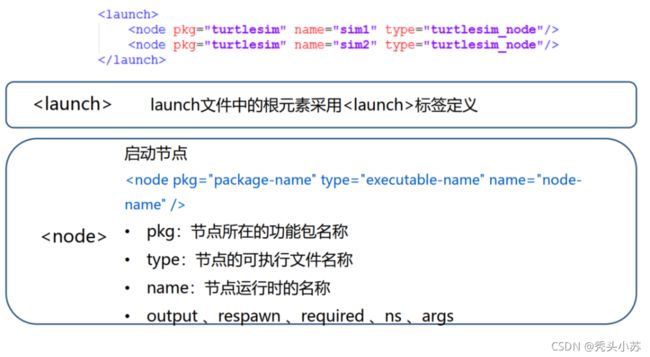
4、launch启动文件的使用方法
这部分内容是很重要的,但是本质上用的还是前面的程序,只是相当于通过launch文件进行了总结,这样直接启动launch文件可以减少开设多个终端,从而减低出错率。launch文件是通过XML文件实现多节点的配置和启动的,其可自启动ROS Master。这里只介绍一些launch文件的重要语法。

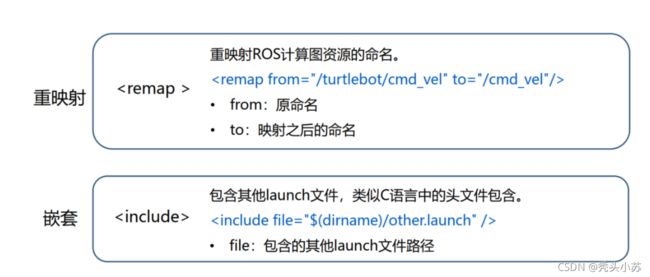
更多的相关语法查看WIki:launch使用方法
咻咻咻咻~~duang~~点个赞呗
上一篇:【古月21讲】ROS入门系列(3)——客户端Client、服务器Server的编程实现+自定义服务数据编程实现