swin transformer论文及代码学习
论文 源码
Overall Architecture

Image
输入image的大小为三维矩阵:H W 3。H为Height,W为Width,3为通道channel,这里指的是RGB。图中只以一个image为例,也就是batch_size = 1。
Patch Partition


一张图片读入后表示为像素矩阵,需要先对图片进行patch partition处理,将图片的最小单位从像素转变为patch。论文中所给的示例为一个patch由4*4个pixel构成,即patch partition模块用包含4*4个像素的patch来对像素矩阵进行分割,并一个patch中的像素值合成一个向量。输入的像素矩阵经过处理后变为![]() 的三维矩阵,其中H/4 * W/4表示patch的数量,48为channel,由3*4*4得来。
的三维矩阵,其中H/4 * W/4表示patch的数量,48为channel,由3*4*4得来。
Linear Embedding
A linear embedding layer is applied on this raw-valued feature to project it to an arbitrary dimension(denoted as C).C default 96.
代码中PatchEmbed()类中包含了Patch Partition 和Linear Embedding两个模块。具体代码含义见下面注释。
class PatchEmbed(nn.Module):
r""" Image to Patch Embedding
Args:
img_size (int): Image size. Default: 224.
patch_size (int): Patch token size. Default: 4. 4 pixel
in_chans (int): Number of input image channels. Default: 3. RGB
embed_dim (int): Number of linear projection output channels. Default: 96.
norm_layer (nn.Module, optional): Normalization layer. Default: None
"""
def __init__(self, img_size=224, patch_size=4, in_chans=3, embed_dim=96, norm_layer=None):
super().__init__()
#img_size -> tuple(img_size,img_size) 即(224,224)
img_size = to_2tuple(img_size)
patch_size = to_2tuple(patch_size)
patches_resolution = [img_size[0] // patch_size[0], img_size[1] // patch_size[1]]
self.img_size = img_size
self.patch_size = patch_size
self.patches_resolution = patches_resolution
#图片中的patch个数
self.num_patches = patches_resolution[0] * patches_resolution[1]
#input channel default RGB:3
self.in_chans = in_chans
#output channel
self.embed_dim = embed_dim
#in_chans:3 out_chans:96 即输入一个图片的三个通道 经过4*4的卷积核和步长为4后输出channel为96
self.proj = nn.Conv2d(in_chans, embed_dim, kernel_size=patch_size, stride=patch_size)
#默认经过embedding后进行标准化norm layer
if norm_layer is not None:
self.norm = norm_layer(embed_dim)
else:
self.norm = None
def forward(self, x):
# batch channel height width
B, C, H, W = x.shape
# FIXME look at relaxing size constraints
#判断输入图片格式是否符合模型
assert H == self.img_size[0] and W == self.img_size[1], \
f"Input image size ({H}*{W}) doesn't match model ({self.img_size[0]}*{self.img_size[1]})."
#将图片进行embed flatten将数组从括号中的维度开始将后面的所有数降为一维
# 这里x为B C PH PW 4维
#经过flatten变为B C PH*PW 3维 再经过transpose调换维度 变为B PH*PW C
x = self.proj(x).flatten(2).transpose(1, 2) # B Ph*Pw C
#标准化
if self.norm is not None:
x = self.norm(x)
return x
#理论计算复杂度
def flops(self):
#用patch的数量来进行计算
Ho, Wo = self.patches_resolution
# 图片patch的数量 网络输入输出通道 每个patch内含有的pixel
flops = Ho * Wo * (self.embed_dim * self.in_chans) * (self.patch_size[0] * self.patch_size[1])
#如果未进行标准化 则再加上
if self.norm is not None:
flops += Ho * Wo * self.embed_dim
return flopsPatch Merging
实现了patch合并,使得channel*4,在经过卷积网络进行降维,使得channel/2。
The first patch merging layer concatenates the features of each group of 2*2 neighboring patches,and applies a linear layer on the 4C-dimensional concatenated features.This reduces the number of tokens by a multiple of 2*2 = 4(2*downsampling of resolution),and the output dimension is set to 2C.
class PatchMerging(nn.Module):
r""" Patch Merging Layer.
Args:
input_resolution (tuple[int]): Resolution of input feature. feature map的size
dim (int): Number of input channels.
norm_layer (nn.Module, optional): Normalization layer. Default: nn.LayerNorm
"""
def __init__(self, input_resolution, dim, norm_layer=nn.LayerNorm):
super().__init__()
self.input_resolution = input_resolution
self.dim = dim
#input channel:4*dim output channel:2*dim 降维
self.reduction = nn.Linear(4 * dim, 2 * dim, bias=False)
self.norm = norm_layer(4 * dim)
def forward(self, x):
"""
x: B, H*W, C
"""
H, W = self.input_resolution
B, L, C = x.shape
#检验输入是否符合模型
assert L == H * W, "input feature has wrong size"
#判断高 宽是否为偶数
assert H % 2 == 0 and W % 2 == 0, f"x size ({H}*{W}) are not even."
#reshape
x = x.view(B, H, W, C)
#0::2 表示从0开始step为2,一直取完
x0 = x[:, 0::2, 0::2, :] # B H/2 W/2 C
x1 = x[:, 1::2, 0::2, :] # B H/2 W/2 C
x2 = x[:, 0::2, 1::2, :] # B H/2 W/2 C
x3 = x[:, 1::2, 1::2, :] # B H/2 W/2 C
#cat为接合张量 -1表示最内侧的那一维 如0,1,2,3 则-1表示3 这里表示xi张量按照C这一维度进行接合
x = torch.cat([x0, x1, x2, x3], -1) # B H/2 W/2 4*C
x = x.view(B, -1, 4 * C) # B H/2*W/2 4*C
# 标准化
x = self.norm(x)
x = self.reduction(x)
return x
#一些额外的信息
def extra_repr(self) -> str:
return f"input_resolution={self.input_resolution}, dim={self.dim}"
#计算复杂度
def flops(self):
H, W = self.input_resolution
flops = H * W * self.dim
flops += (H // 2) * (W // 2) * 4 * self.dim * 2 * self.dim
return flops
Swin Transformer Block

LN LayerNorm
A LayerNorm layer is applied before each MSA module and each MLP,and a residual connection is applied after each module.
MLP Muti-Layer Perception
就是一个两层fc网络
class Mlp(nn.Module):
"""
Muti-Layer Perception ,MLP
就是一个两层fc网络
in_features:
hidden_features:
out_features:
act_layer: activation function
"""
def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.GELU, drop=0.):
"""
GELU(x)=x∗Φ(x)
"""
super().__init__()
#若未输入out_features hidden_features则输入输出维度一样
out_features = out_features or in_features
hidden_features = hidden_features or in_features
#两个fc网络
self.fc1 = nn.Linear(in_features, hidden_features)
self.act = act_layer()
self.fc2 = nn.Linear(hidden_features, out_features)
#随机赋0 防止过拟合
self.drop = nn.Dropout(drop)
def forward(self, x):
x = self.fc1(x)
x = self.act(x)
#随机赋0
x = self.drop(x)
x = self.fc2(x)
x = self.drop(x)
return xW-MSA and SW-MSA
W-MSA and SW-MSA are multi-head self attention modules with regular and shifed windowing configurations,respectively.
这里的multi-head self attention 请见其他文章。下面主要介绍window_partition,shifted window partition and window_attention
这一部分借鉴图解Swin Transformer zzzk 受益匪浅。
window_partition and window_reverse
用window分割multi-head self attention的输入
#将输入: batch height width c-dimension 分割为: num_windows*batch window_size window_size c-dimension
#其中num_windows=height*width/(window_size*window_size)
def window_partition(x, window_size):
"""
Args:
x: (B, H, W, C) batch height width c-dimention
window_size (int): window size
Returns:
windows: (num_windows*B, window_size, window_size, C)
"""
B, H, W, C = x.shape
# a//b 整除
x = x.view(B, H // window_size, window_size, W // window_size, window_size, C)
# permute 将3和2调换 contiguous检测在内存上存储是否连续
windows = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(-1, window_size, window_size, C)
return windows
#是window_partition的逆过程
def window_reverse(windows, window_size, H, W):
"""
Args:
windows: (num_windows*B, window_size, window_size, C)
window_size (int): Window size
H (int): Height of image
W (int): Width of image
Returns:
x: (B, H, W, C)
"""
B = int(windows.shape[0] / (H * W / window_size / window_size))
x = windows.view(B, H // window_size, W // window_size, window_size, window_size, -1)
x = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(B, H, W, -1)
return x
window_attention
以window为单位求输入通过multi-head self attention后的输出

class WindowAttention(nn.Module):
r""" Window based multi-head self attention (W-MSA) module with relative position bias.
It supports both of shifted and non-shifted window.
Args:
dim (int): Number of input channels.
window_size (tuple[int]): The height and width of the window.
num_heads (int): Number of attention heads.
qkv_bias (bool, optional): If True, add a learnable bias to query, key, value. Default: True
qk_scale (float | None, optional): Override default qk scale of head_dim ** -0.5 if set
attn_drop (float, optional): Dropout ratio of attention weight. Default: 0.0
proj_drop (float, optional): Dropout ratio of output. Default: 0.0
"""
def __init__(self, dim, window_size, num_heads, qkv_bias=True, qk_scale=None, attn_drop=0., proj_drop=0.):
super().__init__()
self.dim = dim
self.window_size = window_size # Wh, Ww
self.num_heads = num_heads
#输入的dim被multi-head attention的每个head瓜分 各自进行attention计算
head_dim = dim // num_heads
self.scale = qk_scale or head_dim ** -0.5
# define a parameter table of relative position bias
#初始化一个全零矩阵 (2*wh-1)*(2*ww-1) num_heads 相对位置在数轴上的分布维[-window_size + 1,window_size - 1]
#里面的参数需要进行学习
self.relative_position_bias_table = nn.Parameter(
torch.zeros((2 * window_size[0] - 1) * (2 * window_size[1] - 1), num_heads)) # 2*Wh-1 * 2*Ww-1, nH
# get pair-wise relative position index for each token inside the window
#生成window中的每个token的相对位置,其中最小的相对位置为0,后面需要用这个相对位置作为索引,在relative_position_bias中去找到相应的bias
coords_h = torch.arange(self.window_size[0]) #wh [0,1,....wh-1]
coords_w = torch.arange(self.window_size[1]) #ww [0,1,....ww-1]
#stack合并tensor
coords = torch.stack(torch.meshgrid([coords_h, coords_w])) # 2, Wh, Ww
#将coords按coords[1]这一维度将此维度及之后的维度合并成一维的
coords_flatten = torch.flatten(coords, 1) # 2, Wh*Ww
#None可以看作给该维度加上一个[] 如第一个[:,:,None]就是给最内维的维度中所有元素加上[]
relative_coords = coords_flatten[:, :, None] - coords_flatten[:, None, :] # 2, Wh*Ww, Wh*Ww
relative_coords = relative_coords.permute(1, 2, 0).contiguous() # Wh*Ww, Wh*Ww, 2
relative_coords[:, :, 0] += self.window_size[0] - 1 # shift to start from 0
relative_coords[:, :, 1] += self.window_size[1] - 1
relative_coords[:, :, 0] *= 2 * self.window_size[1] - 1
relative_position_index = relative_coords.sum(-1) # Wh*Ww, Wh*Ww
self.register_buffer("relative_position_index", relative_position_index)
#
#dim -> 3*dim (q k v)
self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias)
self.attn_drop = nn.Dropout(attn_drop)
self.proj = nn.Linear(dim, dim)
self.proj_drop = nn.Dropout(proj_drop)
#用截断正态分布填充position bias矩阵
trunc_normal_(self.relative_position_bias_table, std=.02)
self.softmax = nn.Softmax(dim=-1)
def forward(self, x, mask=None):
"""
Args:
x: input features with shape of (num_windows*B, N, C)
mask: (0/-inf) mask with shape of (num_windows, Wh*Ww, Wh*Ww) or None
"""
# batch*num_windows wh*ww c-dimension
B_, N, C = x.shape
#batch*num_windows wh*ww c 经过qkv线性变换为 num_windows*batch,wh*ww,3*c 3表示q k v三个矩阵
# batch*num_windows wh*ww 3 num_heads c-dimention -> 3 ,num_windows*batch, num_heads ,wh*ww ,c//num_heads
qkv = self.qkv(x).reshape(B_, N, 3, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)
q, k, v = qkv[0], qkv[1], qkv[2] # make torchscript happy (cannot use tensor as tuple) num_windows*batch ,num_head ,wh*ww ,c//num_heads
q = q * self.scale #num_windows*batch num_head wh*ww c//num_heads
#计算对应位置元素相乘在求和
attn = (q @ k.transpose(-2, -1)) # num_windows*batch,num_head ,wh*ww, wh*ww
relative_position_bias = self.relative_position_bias_table[self.relative_position_index.view(-1)].view(
self.window_size[0] * self.window_size[1], self.window_size[0] * self.window_size[1], -1) # Wh*Ww,Wh*Ww,nH
relative_position_bias = relative_position_bias.permute(2, 0, 1).contiguous() # num_head, Wh*Ww, Wh*Ww
#unsqueeze用于增加一个维度 等同[None,:,:]
attn = attn + relative_position_bias.unsqueeze(0) # num_windows*batch,num_head ,wh*ww, wh*ww
#是否进行mask
if mask is not None:
nW = mask.shape[0] #num_mask
#attn + mask
attn = attn.view(B_ // nW, nW, self.num_heads, N, N) + mask.unsqueeze(1).unsqueeze(0)
attn = attn.view(-1, self.num_heads, N, N)
attn = self.softmax(attn)
else:
attn = self.softmax(attn)
attn = self.attn_drop(attn)
#num_windows*batch,num_head ,wh*ww, c//num_heads-> batch*num_windows, wh*ww ,c-dimension
x = (attn @ v).transpose(1, 2).reshape(B_, N, C)
x = self.proj(x)
x = self.proj_drop(x)
return x
下面把attention相关位置编码的代码拿出来详细讲解一下
以下部分主要选自于图解swin transformer
对于attention来说,以不同元素为原点,其他元素的坐标也是不同的,以window_size=2为例,其相对位置编码如下图

源代码
coords_h = torch.arange(self.window_size[0]) #wh [0,1,....wh-1]
coords_w = torch.arange(self.window_size[1]) #ww [0,1,....ww-1]
#stack合并tensor
coords = torch.stack(torch.meshgrid([coords_h, coords_w])) # 2, Wh, Ww
"""
经过meshgrid后
(tensor([[0, 0],
[1, 1]]),
tensor([[0, 1],
[0, 1]]))
经过stack后
tensor([[[0, 0],
[1, 1]],
[[0, 1],
[0, 1]]])
"""
#将coords按coords[1]这一维度将此维度及之后的维度合并成一维的
coords_flatten = torch.flatten(coords, 1) # 2, Wh*Ww
"""
经过flatten后
tensor([[0, 0, 1, 1],
[0, 1, 0, 1]])
"""
#None可以看作给该维度加上一个[] 如第一个[:,:,None]就是给最内维的维度中所有元素加上[]
relative_coords = coords_flatten[:, :, None] - coords_flatten[:, None, :] # 2, Wh*Ww, Wh*Ww
relative_coords = relative_coords.permute(1, 2, 0).contiguous() # Wh*Ww, Wh*Ww, 2
relative_coords[:, :, 0] += self.window_size[0] - 1 # shift to start from 0
relative_coords[:, :, 1] += self.window_size[1] - 1
relative_coords[:, :, 0] *= 2 * self.window_size[1] - 1
relative_position_index = relative_coords.sum(-1) # Wh*Ww, Wh*Ww
#注册一个不参与网络学习的变量
self.register_buffer("relative_position_index", relative_position_index)window_size为2的例子
>>> import torch
>>> window_size = [2,2]
>>> coords_h = torch.arange(window_size[0])
>>> coords_w = torch.arange(window_size[1])
>>> coords = torch.meshgrid([coords_h,coords_w])
>>> coords
(tensor([[0, 0],
[1, 1]]), tensor([[0, 1],
[0, 1]]))
>>> coords = torch.stack(coords)
>>> coords
tensor([[[0, 0],
[1, 1]],
[[0, 1],
[0, 1]]])
>>> coords_flatten = torch.flatten(coords,1)
>>> coords_flatten
tensor([[0, 0, 1, 1],
[0, 1, 0, 1]])
>>> relative_coords_first = coords_flatten[:,:,None]
>>> relative_coords_second = coords_flatten[:,None,:]
>>> relative_coords = relative_coords_first - relative_coords_second
>>> relative_coords
tensor([[[ 0, 0, -1, -1],
[ 0, 0, -1, -1],
[ 1, 1, 0, 0],
[ 1, 1, 0, 0]],
[[ 0, -1, 0, -1],
[ 1, 0, 1, 0],
[ 0, -1, 0, -1],
[ 1, 0, 1, 0]]])
>>> relative_coords = relative_coords.permute(1, 2, 0).contiguous()
>>> relative_coords
tensor([[[ 0, 0],
[ 0, -1],
[-1, 0],
[-1, -1]],
[[ 0, 1],
[ 0, 0],
[-1, 1],
[-1, 0]],
[[ 1, 0],
[ 1, -1],
[ 0, 0],
[ 0, -1]],
[[ 1, 1],
[ 1, 0],
[ 0, 1],
[ 0, 0]]])
>>> relative_coords[:,:,0] += window_size[0] - 1
>>> relative_coords[:,:,1] += window_size[1] - 1
>>> relative_coords
tensor([[[1, 1],
[1, 0],
[0, 1],
[0, 0]],
[[1, 2],
[1, 1],
[0, 2],
[0, 1]],
[[2, 1],
[2, 0],
[1, 1],
[1, 0]],
[[2, 2],
[2, 1],
[1, 2],
[1, 1]]])可以看到上述代码最后得到的tensor就是图中最后得到的矩阵

后续我们需要将二维坐标转化为一维坐标,如果只是通过将(x,y)中两坐标相加转换为一维坐标,则对于(1,2)和(2,1)这两个二维坐标映射到一维坐标上就会是相等的,都为3。

所以,为了使得类似(1,2)和(2,1)这两个坐标在映射后的一维坐标不同,我们还需要做一些操作,如下代码
>>> relative_coords[:,:,0] *= 2 * window_size[1] - 1
>>> relative_coords
tensor([[[3, 1],
[3, 0],
[0, 1],
[0, 0]],
[[3, 2],
[3, 1],
[0, 2],
[0, 1]],
[[6, 1],
[6, 0],
[3, 1],
[3, 0]],
[[6, 2],
[6, 1],
[3, 2],
[3, 1]]])
>>> relative_position_index = relative_coords.sum(-1)
>>> relative_position_index
tensor([[4, 3, 1, 0],
[5, 4, 2, 1],
[7, 6, 4, 3],
[8, 7, 5, 4]])
Shifted Window Attention
使用原因:The window-based self-attention module lacks connections across windows,which limits its modeling power.To introduce cross-window connections while maintaining the efficient computation of non-overlapping windows,we propose a shifted window partitioning approach which alternates between two partitioning configuration in consecutive Swin Transformer blocks.

如上图,layer l为一个输入attention中的输入,红色框为windows,灰色框为一个patch,layer l中的分割线经过上移两个patch和左移两个patch便得到了layer l+1。原来输入可以被分割为4个windows,而经过shifted后,输入被分割为了3*3个一样大小的windows。
论文中给出了两种计算layerl +1中attention的方法:
A naive solution is to pad the smaller windows to a size of M*M and mask out the padded values when computing attention.
但上述方法会增加计算复杂度,所以给出了一个更加有效的方法
Here,we propose a more efficient batch computation approach by cyclic-shifting toward the top-left direction,as illustrated in Figure 4,the next figure.
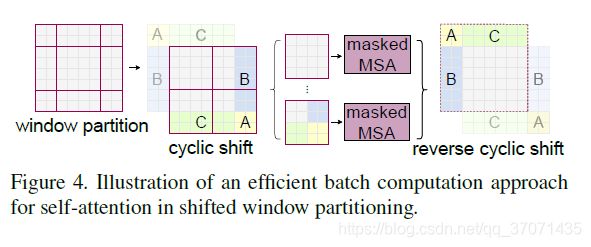
在实际代码里,我们是通过对特征图移位,并给Attention设置mask来简介实现的,能在保持原有的window的数量下,获得等价的结果。
特征图移位操作
代码里对特征图移位是通过torch.roll()来实现的,如下图

注意:如果需要reverse cyclic shift的话只需把参数shifts设置为对应的正数值
Attention Mask
通过设置合理的mask,让shifted window attention 在与window attention相同的窗口个数下,达到等价的计算结果。
首先对shift window后的每个窗口都给上index,并做一个roll操作(window_size=2,shift_size=1)

我们希望在计算Attention的时候,让具有相同index qk进行计算,而忽略不同index qk的计算结果。
正确结果如下图所示

而想要在原始四个窗口下得到正确的结果,我们就必须要给attention的结果加入一个mask(如上图最右边所示)
if self.shift_size > 0:
# calculate attention mask for SW-MSA
H, W = self.input_resolution
img_mask = torch.zeros((1, H, W, 1)) # 1 H W 1
h_slices = (slice(0, -self.window_size),
slice(-self.window_size, -self.shift_size),
slice(-self.shift_size, None))
w_slices = (slice(0, -self.window_size),
slice(-self.window_size, -self.shift_size),
slice(-self.shift_size, None))
cnt = 0
for h in h_slices:
for w in w_slices:
img_mask[:, h, w, :] = cnt
cnt += 1
mask_windows = window_partition(img_mask, self.window_size) # nW, window_size, window_size, 1
mask_windows = mask_windows.view(-1, self.window_size * self.window_size)
attn_mask = mask_windows.unsqueeze(1) - mask_windows.unsqueeze(2)
attn_mask = attn_mask.masked_fill(attn_mask != 0, float(-100.0)).masked_fill(attn_mask == 0, float(0.0))
else:
attn_mask = None
self.register_buffer("attn_mask", attn_mask)通过如上代码,我们会得到这样一个mask
tensor([[[[[ 0., 0., 0., 0.],
[ 0., 0., 0., 0.],
[ 0., 0., 0., 0.],
[ 0., 0., 0., 0.]]],
[[[ 0., -100., 0., -100.],
[-100., 0., -100., 0.],
[ 0., -100., 0., -100.],
[-100., 0., -100., 0.]]],
[[[ 0., 0., -100., -100.],
[ 0., 0., -100., -100.],
[-100., -100., 0., 0.],
[-100., -100., 0., 0.]]],
[[[ 0., -100., -100., -100.],
[-100., 0., -100., -100.],
[-100., -100., 0., -100.],
[-100., -100., -100., 0.]]]]])在之前的window attention模块的前向代码里,包含这么一段
if mask is not None:
nW = mask.shape[0]
attn = attn.view(B_ // nW, nW, self.num_heads, N, N) + mask.unsqueeze(1).unsqueeze(0)
attn = attn.view(-1, self.num_heads, N, N)
attn = self.softmax(attn)将mask加到attention的计算结果,并进行softmax。mask的值设置为-100,softmax后就会忽略掉对应的值
Swin Transformer Blocks CODE
class SwinTransformerBlock(nn.Module):
r""" Swin Transformer Block.
Args:
dim (int): Number of input channels. c-dimention
input_resolution (tuple[int]): Input resulotion. wh*ww
num_heads (int): Number of attention heads.
window_size (int): Window size.
shift_size (int): Shift size for SW-MSA.
mlp_ratio (float): Ratio of mlp hidden dim to embedding dim.
qkv_bias表示self attention的输入之间的位置信息或说位置关系
qkv_bias (bool, optional): If True, add a learnable bias to query, key, value. Default: True
qk_scale (float | None, optional): Override default qk scale of head_dim ** -0.5 if set.
drop (float, optional): Dropout rate. Default: 0.0
attn_drop (float, optional): Attention dropout rate. Default: 0.0
drop_path (float, optional): Stochastic depth rate. Default: 0.0
act_layer (nn.Module, optional): Activation layer. Default: nn.GELU
norm_layer (nn.Module, optional): Normalization layer. Default: nn.LayerNorm
"""
def __init__(self, dim, input_resolution, num_heads, window_size=7, shift_size=0,
mlp_ratio=4., qkv_bias=True, qk_scale=None, drop=0., attn_drop=0., drop_path=0.,
act_layer=nn.GELU, norm_layer=nn.LayerNorm):
super().__init__()
self.dim = dim
self.input_resolution = input_resolution
self.num_heads = num_heads
self.window_size = window_size
self.shift_size = shift_size
self.mlp_ratio = mlp_ratio
#判断输入张量大小与窗口的大小
if min(self.input_resolution) <= self.window_size:
# if window size is larger than input resolution, we don't partition windows
self.shift_size = 0
self.window_size = min(self.input_resolution)
assert 0 <= self.shift_size < self.window_size, "shift_size must in 0-window_size"
self.norm1 = norm_layer(dim)
self.attn = WindowAttention(
dim, window_size=to_2tuple(self.window_size), num_heads=num_heads,
qkv_bias=qkv_bias, qk_scale=qk_scale, attn_drop=attn_drop, proj_drop=drop)
self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity()
self.norm2 = norm_layer(dim)
#隐藏层维度
mlp_hidden_dim = int(dim * mlp_ratio)
self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop)
#shifting windows
#mask: (0/-inf) mask with shape of (num_windows, Wh*Ww, Wh*Ww) or None
if self.shift_size > 0:
# calculate attention mask for SW-MSA
H, W = self.input_resolution
img_mask = torch.zeros((1, H, W, 1)) # 1 H W 1
h_slices = (slice(0, -self.window_size),
slice(-self.window_size, -self.shift_size),
slice(-self.shift_size, None))
w_slices = (slice(0, -self.window_size),
slice(-self.window_size, -self.shift_size),
slice(-self.shift_size, None))
cnt = 0
for h in h_slices:
for w in w_slices:
img_mask[:, h, w, :] = cnt
cnt += 1
mask_windows = window_partition(img_mask, self.window_size) # nW, window_size, window_size, 1
mask_windows = mask_windows.view(-1, self.window_size * self.window_size)
attn_mask = mask_windows.unsqueeze(1) - mask_windows.unsqueeze(2)
attn_mask = attn_mask.masked_fill(attn_mask != 0, float(-100.0)).masked_fill(attn_mask == 0, float(0.0))
else:
attn_mask = None
self.register_buffer("attn_mask", attn_mask)
def forward(self, x):
#获取输入feature map的高和宽
H, W = self.input_resolution
#获得整个输入x batch l=h*w c-dimention
B, L, C = x.shape
assert L == H * W, "input feature has wrong size"
shortcut = x
#layer normalization 标准化
x = self.norm1(x)
x = x.view(B, H, W, C)
# cyclic shift torch.roll用来shift元素
if self.shift_size > 0:
shifted_x = torch.roll(x, shifts=(-self.shift_size, -self.shift_size), dims=(1, 2))
else:
shifted_x = x
# partition windows
x_windows = window_partition(shifted_x, self.window_size) # nW*B, window_size, window_size, C
x_windows = x_windows.view(-1, self.window_size * self.window_size, C) # nW*B, window_size*window_size, C
# W-MSA/SW-MSA
attn_windows = self.attn(x_windows, mask=self.attn_mask) # nW*B, window_size*window_size, C
# merge windows
attn_windows = attn_windows.view(-1, self.window_size, self.window_size, C)
shifted_x = window_reverse(attn_windows, self.window_size, H, W) # B H' W' C
# reverse cyclic shift
if self.shift_size > 0:
x = torch.roll(shifted_x, shifts=(self.shift_size, self.shift_size), dims=(1, 2))
else:
x = shifted_x
x = x.view(B, H * W, C)
# FFN Feed-Forward Network #residual connection
x = shortcut + self.drop_path(x)
# MLP #residual connection
x = x + self.drop_path(self.mlp(self.norm2(x)))
return x
def extra_repr(self) -> str:
return f"dim={self.dim}, input_resolution={self.input_resolution}, num_heads={self.num_heads}, " \
f"window_size={self.window_size}, shift_size={self.shift_size}, mlp_ratio={self.mlp_ratio}"
def flops(self):
flops = 0
H, W = self.input_resolution
# norm1
flops += self.dim * H * W
# W-MSA/SW-MSA
nW = H * W / self.window_size / self.window_size
flops += nW * self.attn.flops(self.window_size * self.window_size)
# mlp
flops += 2 * H * W * self.dim * self.dim * self.mlp_ratio
# norm2
flops += self.dim * H * W
return flops
BasicLayer
如图中,每个stage中都有偶数个swin transformer blocks,右边的图中为两个相连的blocks的结构,下面代码给出了有depth个block的stage的实现模型
class BasicLayer(nn.Module):
""" A basic Swin Transformer layer for one stage.
Args:
dim (int): Number of input channels.
input_resolution (tuple[int]): Input resolution.
depth (int): Number of blocks.
num_heads (int): Number of attention heads.
window_size (int): Local window size.
mlp_ratio (float): Ratio of mlp hidden dim to embedding dim.
qkv_bias (bool, optional): If True, add a learnable bias to query, key, value. Default: True
qk_scale (float | None, optional): Override default qk scale of head_dim ** -0.5 if set.
drop (float, optional): Dropout rate. Default: 0.0
attn_drop (float, optional): Attention dropout rate. Default: 0.0
drop_path (float | tuple[float], optional): Stochastic depth rate. Default: 0.0
norm_layer (nn.Module, optional): Normalization layer. Default: nn.LayerNorm
downsample (nn.Module | None, optional): Downsample layer at the end of the layer. Default: None
use_checkpoint (bool): Whether to use checkpointing to save memory. Default: False.
"""
def __init__(self, dim, input_resolution, depth, num_heads, window_size,
mlp_ratio=4., qkv_bias=True, qk_scale=None, drop=0., attn_drop=0.,
drop_path=0., norm_layer=nn.LayerNorm, downsample=None, use_checkpoint=False):
super().__init__()
self.dim = dim
self.input_resolution = input_resolution
self.depth = depth
self.use_checkpoint = use_checkpoint
# build blocks
#nn.modulelist: Holds submodules in a list.
self.blocks = nn.ModuleList([
SwinTransformerBlock(dim=dim, input_resolution=input_resolution,
num_heads=num_heads, window_size=window_size,
shift_size=0 if (i % 2 == 0) else window_size // 2,
mlp_ratio=mlp_ratio,
qkv_bias=qkv_bias, qk_scale=qk_scale,
drop=drop, attn_drop=attn_drop,
drop_path=drop_path[i] if isinstance(drop_path, list) else drop_path,
norm_layer=norm_layer)
for i in range(depth)])
# patch merging layer
if downsample is not None:
self.downsample = downsample(input_resolution, dim=dim, norm_layer=norm_layer)
else:
self.downsample = None
def forward(self, x):
for blk in self.blocks:
if self.use_checkpoint:
x = checkpoint.checkpoint(blk, x)
else:
x = blk(x)
if self.downsample is not None:
x = self.downsample(x)
return x
def extra_repr(self) -> str:
return f"dim={self.dim}, input_resolution={self.input_resolution}, depth={self.depth}"
def flops(self):
flops = 0
for blk in self.blocks:
flops += blk.flops()
if self.downsample is not None:
flops += self.downsample.flops()
return flopsSwinTransformer
class SwinTransformer(nn.Module):
r""" Swin Transformer
A PyTorch impl of : `Swin Transformer: Hierarchical Vision Transformer using Shifted Windows` -
https://arxiv.org/pdf/2103.14030
Args:
img_size (int | tuple(int)): Input image size. Default 224
patch_size (int | tuple(int)): Patch size. Default: 4
in_chans (int): Number of input image channels. Default: 3
num_classes (int): Number of classes for classification head. Default: 1000
embed_dim (int): Patch embedding dimension. Default: 96
depths (tuple(int)): Depth of each Swin Transformer layer.
num_heads (tuple(int)): Number of attention heads in different layers.
window_size (int): Window size. Default: 7
mlp_ratio (float): Ratio of mlp hidden dim to embedding dim. Default: 4
qkv_bias (bool): If True, add a learnable bias to query, key, value. Default: True
qk_scale (float): Override default qk scale of head_dim ** -0.5 if set. Default: None
drop_rate (float): Dropout rate. Default: 0
attn_drop_rate (float): Attention dropout rate. Default: 0
drop_path_rate (float): Stochastic depth rate. Default: 0.1
norm_layer (nn.Module): Normalization layer. Default: nn.LayerNorm.
ape (bool): If True, add absolute position embedding to the patch embedding. Default: False
patch_norm (bool): If True, add normalization after patch embedding. Default: True
use_checkpoint (bool): Whether to use checkpointing to save memory. Default: False
"""
def __init__(self, img_size=224, patch_size=4, in_chans=3, num_classes=1000,
embed_dim=96, depths=[2, 2, 6, 2], num_heads=[3, 6, 12, 24],
window_size=7, mlp_ratio=4., qkv_bias=True, qk_scale=None,
drop_rate=0., attn_drop_rate=0., drop_path_rate=0.1,
norm_layer=nn.LayerNorm, ape=False, patch_norm=True,
use_checkpoint=False, **kwargs):
super().__init__()
self.num_classes = num_classes
self.num_layers = len(depths)
self.embed_dim = embed_dim
self.ape = ape
self.patch_norm = patch_norm
self.num_features = int(embed_dim * 2 ** (self.num_layers - 1))
self.mlp_ratio = mlp_ratio
# split image into non-overlapping patches
self.patch_embed = PatchEmbed(
img_size=img_size, patch_size=patch_size, in_chans=in_chans, embed_dim=embed_dim,
norm_layer=norm_layer if self.patch_norm else None)
num_patches = self.patch_embed.num_patches
patches_resolution = self.patch_embed.patches_resolution
self.patches_resolution = patches_resolution
# absolute position embedding
if self.ape:
self.absolute_pos_embed = nn.Parameter(torch.zeros(1, num_patches, embed_dim))
trunc_normal_(self.absolute_pos_embed, std=.02)
self.pos_drop = nn.Dropout(p=drop_rate)
# stochastic depth
dpr = [x.item() for x in torch.linspace(0, drop_path_rate, sum(depths))] # stochastic depth decay rule
# build layers
self.layers = nn.ModuleList()
for i_layer in range(self.num_layers):
layer = BasicLayer(dim=int(embed_dim * 2 ** i_layer),
input_resolution=(patches_resolution[0] // (2 ** i_layer),
patches_resolution[1] // (2 ** i_layer)),
depth=depths[i_layer],
num_heads=num_heads[i_layer],
window_size=window_size,
mlp_ratio=self.mlp_ratio,
qkv_bias=qkv_bias, qk_scale=qk_scale,
drop=drop_rate, attn_drop=attn_drop_rate,
drop_path=dpr[sum(depths[:i_layer]):sum(depths[:i_layer + 1])],
norm_layer=norm_layer,
downsample=PatchMerging if (i_layer < self.num_layers - 1) else None,
use_checkpoint=use_checkpoint)
self.layers.append(layer)
self.norm = norm_layer(self.num_features)
self.avgpool = nn.AdaptiveAvgPool1d(1)
self.head = nn.Linear(self.num_features, num_classes) if num_classes > 0 else nn.Identity()
self.apply(self._init_weights)
def _init_weights(self, m):
if isinstance(m, nn.Linear):
trunc_normal_(m.weight, std=.02)
if isinstance(m, nn.Linear) and m.bias is not None:
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.LayerNorm):
nn.init.constant_(m.bias, 0)
nn.init.constant_(m.weight, 1.0)
@torch.jit.ignore
def no_weight_decay(self):
return {'absolute_pos_embed'}
@torch.jit.ignore
def no_weight_decay_keywords(self):
return {'relative_position_bias_table'}
def forward_features(self, x):
x = self.patch_embed(x)
if self.ape:
x = x + self.absolute_pos_embed
x = self.pos_drop(x)
for layer in self.layers:
x = layer(x)
x = self.norm(x) # B L C
x = self.avgpool(x.transpose(1, 2)) # B C 1
x = torch.flatten(x, 1)
return x
def forward(self, x):
x = self.forward_features(x)
x = self.head(x)
return x
def flops(self):
flops = 0
flops += self.patch_embed.flops()
for i, layer in enumerate(self.layers):
flops += layer.flops()
flops += self.num_features * self.patches_resolution[0] * self.patches_resolution[1] // (2 ** self.num_layers)
flops += self.num_features * self.num_classes
return flops