from utils import *
create_data_lists(voc07_path='./data1/VOC2007',output_folder='./json1/')
There are 200 training images containing a total of 600 objects. Files have been saved to /home/jovyan/Week8/json1.
There are 200 validation images containing a total of 600 objects. Files have been saved to /home/jovyan/Week8/json1.
import torch
from torch.utils.data import Dataset
import json
import os
from PIL import Image
from utils import transform
class PascalVOCDataset(Dataset):
"""
A PyTorch Dataset class to be used in a PyTorch DataLoader to create batches.
"""
def __init__(self, data_folder, split, keep_difficult=False):
"""
:param data_folder: folder where data files are stored
:param split: split, one of 'TRAIN' or 'TEST'
:param keep_difficult: keep or discard objects that are considered difficult to detect?
"""
self.split = split.upper()
assert self.split in {'TRAIN', 'TEST'}
self.data_folder = data_folder
self.keep_difficult = keep_difficult
# Read data files
with open(os.path.join(data_folder, self.split + '_images.json'), 'r') as j:
self.images = json.load(j)
with open(os.path.join(data_folder, self.split + '_objects.json'), 'r') as j:
self.objects = json.load(j)
assert len(self.images) == len(self.objects)
def __getitem__(self, i):
# Read image
image = Image.open(self.images[i], mode='r')
image = image.convert('RGB')
# Read objects in this image (bounding boxes, labels, difficulties)
objects = self.objects[i]
boxes = torch.FloatTensor(objects['boxes']) # (n_objects, 4)
labels = torch.LongTensor(objects['labels']) # (n_objects)
difficulties = torch.ByteTensor(objects['difficulties']) # (n_objects)
# Discard difficult objects, if desired
if not self.keep_difficult:
boxes = boxes[1 - difficulties]
labels = labels[1 - difficulties]
difficulties = difficulties[1 - difficulties]
# Apply transformations
image, boxes, labels, difficulties = transform(image, boxes, labels, difficulties, split=self.split)
return image, boxes, labels, difficulties
def __len__(self):
return len(self.images)
def collate_fn(self, batch):
"""
Since each image may have a different number of objects, we need a collate function (to be passed to the DataLoader).
This describes how to combine these tensors of different sizes. We use lists.
Note: this need not be defined in this Class, can be standalone.
:param batch: an iterable of N sets from __getitem__()
:return: a tensor of images, lists of varying-size tensors of bounding boxes, labels, and difficulties
"""
images = list()
boxes = list()
labels = list()
difficulties = list()
for b in batch:
images.append(b[0])
boxes.append(b[1])
labels.append(b[2])
difficulties.append(b[3])
images = torch.stack(images, dim=0)
return images, boxes, labels, difficulties # tensor (N, 3, 300, 300), 3 lists of N tensors each
重写完dataset函数之后,让我们看看目标检测任务的训练数据具体是以何种形式存储的
data_folder = './json1/'
keep_difficult = True
batch_size = 1
workers = 1
train_dataset = PascalVOCDataset(data_folder,
split='train',
keep_difficult=keep_difficult)
val_dataset = PascalVOCDataset(data_folder,
split='test',
keep_difficult=keep_difficult)
train_loader = torch.utils.data.DataLoader(train_dataset, batch_size=batch_size, shuffle=True,
collate_fn=train_dataset.collate_fn, num_workers=workers,
pin_memory=True)
# note that we're passing the collate function here
val_loader = torch.utils.data.DataLoader(val_dataset, batch_size=batch_size, shuffle=True,
collate_fn=val_dataset.collate_fn, num_workers=workers,
pin_memory=True)
# for data in train_loader:
# images, boxes, labels, difficulties = data
# print('images---->', images)
# print('boxes---->', boxes)
# print('labels---->',labels)
# print('difficulties---->',difficulties)
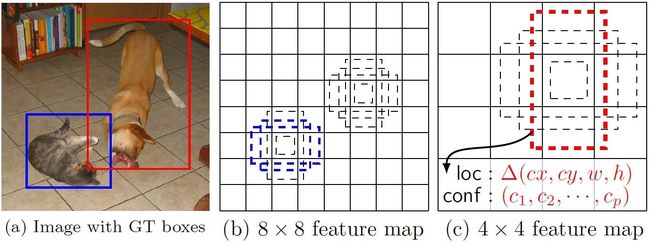
location loss的公式如下,其中,表示CNN对于每个先验框输出的loc值, 表示由ground truth box j与先验框i算出的transform值. 是一个指示参数, 时表示先验框i与ground truth box j匹配,且ground truth box j的类别为k. 这里使用smooth l1 loss来是模型学习到的loc值逼近由先验框与ground truth box得到的transform值.其中,Pos表示非背景的先验框的集合(计算每个prior与每个ground truth box的IOU,最大的IOU小于某个阈值的prior可以视为Negative(背景), 反之视为Positive(非背景)).
import torch.nn as nn
class MultiBoxLoss(nn.Module):
"""
The MultiBox loss, a loss function for object detection.
This is a combination of:
(1) a localization loss for the predicted locations of the boxes, and
(2) a confidence loss for the predicted class scores.
"""
def __init__(self, priors_cxcy, threshold=0.5, neg_pos_ratio=3, alpha=1.):
super(MultiBoxLoss, self).__init__()
self.priors_cxcy = priors_cxcy
self.priors_xy = cxcy_to_xy(priors_cxcy)
self.threshold = threshold
self.neg_pos_ratio = neg_pos_ratio
self.alpha = alpha
self.smooth_l1 = nn.SmoothL1Loss()
self.cross_entropy = nn.CrossEntropyLoss(reduce=False)
def forward(self, predicted_locs, predicted_scores, boxes, labels):
"""
Forward propagation.
:param predicted_locs: predicted locations/boxes w.r.t the 8732 prior boxes, a tensor of dimensions (N, 8732, 4)
:param predicted_scores: class scores for each of the encoded locations/boxes, a tensor of dimensions (N, 8732, n_classes)
:param boxes: true object bounding boxes in boundary coordinates, a list of N tensors
:param labels: true object labels, a list of N tensors
:return: multibox loss, a scalar
"""
batch_size = predicted_locs.size(0)
n_priors = self.priors_cxcy.size(0)
n_classes = predicted_scores.size(2)
assert n_priors == predicted_locs.size(1) == predicted_scores.size(1)
true_locs = torch.zeros((batch_size, n_priors, 4), dtype=torch.float).to(device) # (N, 8732, 4)
true_classes = torch.zeros((batch_size, n_priors), dtype=torch.long).to(device) # (N, 8732)
# For each image
for i in range(batch_size):
n_objects = boxes[i].size(0)
overlap = find_jaccard_overlap(boxes[i],
self.priors_xy) # (n_objects, 8732)
# For each prior, find the object that has the maximum overlap
overlap_for_each_prior, object_for_each_prior = overlap.max(dim=0) # (8732)
# We don't want a situation where an object is not represented in our positive (non-background) priors -
# 1. An object might not be the best object for all priors, and is therefore not in object_for_each_prior.
# 2. All priors with the object may be assigned as background based on the threshold (0.5).
# To remedy this -
# First, find the prior that has the maximum overlap for each object.
_, prior_for_each_object = overlap.max(dim=1) # (N_o)
# Then, assign each object to the corresponding maximum-overlap-prior. (This fixes 1.)
object_for_each_prior[prior_for_each_object] = torch.LongTensor(range(n_objects)).to(device)
# To ensure these priors qualify, artificially give them an overlap of greater than 0.5. (This fixes 2.)
overlap_for_each_prior[prior_for_each_object] = 1.
# Labels for each prior
label_for_each_prior = labels[i][object_for_each_prior] # (8732)
# Set priors whose overlaps with objects are less than the threshold to be background (no object)
label_for_each_prior[overlap_for_each_prior < self.threshold] = 0 # (8732)
# Store
true_classes[i] = label_for_each_prior
# Encode center-size object coordinates into the form we regressed predicted boxes to
true_locs[i] = cxcy_to_gcxgcy(xy_to_cxcy(boxes[i][object_for_each_prior]), self.priors_cxcy) # (8732, 4)
# Identify priors that are positive (object/non-background)
positive_priors = true_classes != 0 # (N, 8732)
# LOCALIZATION LOSS
# Localization loss is computed only over positive (non-background) priors
loc_loss = self.smooth_l1(predicted_locs[positive_priors], true_locs[positive_priors]) # (), scalar
# Note: indexing with a torch.uint8 (byte) tensor flattens the tensor when indexing is across multiple dimensions (N & 8732)
# So, if predicted_locs has the shape (N, 8732, 4), predicted_locs[positive_priors] will have (total positives, 4)
# CONFIDENCE LOSS
# Confidence loss is computed over positive priors and the most difficult (hardest) negative priors in each image
# That is, FOR EACH IMAGE,
# we will take the hardest (neg_pos_ratio * n_positives) negative priors, i.e where there is maximum loss
# This is called Hard Negative Mining - it concentrates on hardest negatives in each image, and also minimizes pos/neg imbalance
# Number of positive and hard-negative priors per image
n_positives = positive_priors.sum(dim=1) # (N)
n_hard_negatives = self.neg_pos_ratio * n_positives # (N)
# First, find the loss for all priors
conf_loss_all = self.cross_entropy(predicted_scores.view(-1, n_classes), true_classes.view(-1)) # (N * 8732)
conf_loss_all = conf_loss_all.view(batch_size, n_priors) # (N, 8732)
# We already know which priors are positive
conf_loss_pos = conf_loss_all[positive_priors] # (sum(n_positives))
# Next, find which priors are hard-negative
# To do this, sort ONLY negative priors in each image in order of decreasing loss and take top n_hard_negatives
conf_loss_neg = conf_loss_all.clone() # (N, 8732)
conf_loss_neg[positive_priors] = 0. # (N, 8732), positive priors are ignored (never in top n_hard_negatives)
conf_loss_neg, _ = conf_loss_neg.sort(dim=1, descending=True) # (N, 8732), sorted by decreasing hardness
hardness_ranks = torch.LongTensor(range(n_priors)).unsqueeze(0).expand_as(conf_loss_neg).to(device) # (N, 8732)
hard_negatives = hardness_ranks < n_hard_negatives.unsqueeze(1) # (N, 8732)
conf_loss_hard_neg = conf_loss_neg[hard_negatives] # (sum(n_hard_negatives))
# As in the paper, averaged over positive priors only, although computed over both positive and hard-negative priors
conf_loss = (conf_loss_hard_neg.sum() + conf_loss_pos.sum()) / n_positives.sum().float() # (), scalar
return conf_loss + self.alpha * loc_loss
def train_model(train_loader, model, criterion, optimizer, epoch):
"""
One epoch's training.
:param train_loader: DataLoader for training data
:param model: model
:param criterion: MultiBox loss
:param optimizer: optimizer
:param epoch: epoch number
"""
model.train() # training mode enables dropout
# Batches
for i, (images, boxes, labels, _) in enumerate(train_loader):
# Move to default device
images = images.to(device) # (batch_size (N), 3, 300, 300)
boxes = [b.to(device) for b in boxes]
labels = [l.to(device) for l in labels]
# Forward prop.
predicted_locs, predicted_scores = model(images) # (N, 8732, 4), (N, 8732, n_classes)
# Loss
loss = criterion(predicted_locs, predicted_scores, boxes, labels) # scalar
# Backward prop.
optimizer.zero_grad()
loss.backward()
# Update model
optimizer.step()
# Print status
if i % print_freq == 0:
print('Loss {loss.val:.4f} ({loss.avg:.4f})\t'.format( loss=losses))
# free some memory since their histories may be stored
del predicted_locs, predicted_scores, images, boxes, labels
import time
import torch.backends.cudnn as cudnn
import torch.optim
import torch.utils.data
from model import SSD300, MultiBoxLoss
from datasets import PascalVOCDataset
from utils import *
from utils1 import *
data_folder = './json1' # folder with data files
keep_difficult = True # use objects considered difficult to detect?
# Model parameters
# Not too many here since the SSD300 has a very specific structure
n_classes = len(label_map) # number of different types of objects
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
# Learning parameters
checkpoint = "checkpoint_ssd300.pth.tar" # path to model checkpoint, None if none
batch_size = 1 # batch size
start_epoch = 0 # start at this epoch
epochs = 5 # number of epochs to run without early-stopping
epochs_since_improvement = 0 # number of epochs since there was an improvement in the validation metric
best_loss = 100. # assume a high loss at first
workers = 1 # number of workers for loading data in the DataLoader
print_freq = 20 # print training or validation status every __ batches
lr = 1e-3 # learning rate
momentum = 0.9 # momentum
weight_decay = 5e-4 # weight decay
grad_clip = None # clip if gradients are exploding, which may happen at larger batch sizes (sometimes at 32) - you will recognize it by a sorting error in the MuliBox loss calculation
cudnn.benchmark = True
模型的训练以及评估
此部分是整个项目的主体结构
def main():
"""
Training and validation.
"""
global epochs_since_improvement, start_epoch, label_map, best_loss, epoch, checkpoint
optimizer, model = init_optimizer_and_model()
# Move to default device
model = model.to(device)
criterion = MultiBoxLoss(priors_cxcy=model.priors_cxcy).to(device)
# Epochs
for epoch in range(start_epoch, epochs):
# Paper describes decaying the learning rate at the 80000th, 100000th, 120000th 'iteration', i.e. model update or batch
# The paper uses a batch size of 32, which means there were about 517 iterations in an epoch
# Therefore, to find the epochs to decay at, you could do,
# if epoch in {80000 // 517, 100000 // 517, 120000 // 517}:
# adjust_learning_rate(optimizer, 0.1)
# In practice, I just decayed the learning rate when loss stopped improving for long periods,
# and I would resume from the last best checkpoint with the new learning rate,
# since there's no point in resuming at the most recent and significantly worse checkpoint.
# So, when you're ready to decay the learning rate, just set checkpoint = 'BEST_checkpoint_ssd300.pth.tar' above
# and have adjust_learning_rate(optimizer, 0.1) BEFORE this 'for' loop
# One epoch's training
train(train_loader=train_loader,
model=model,
criterion=criterion,
optimizer=optimizer,
epoch=epoch)
# One epoch's validation
val_loss = validate(val_loader=val_loader,
model=model,
criterion=criterion)
# Did validation loss improve?
is_best = val_loss < best_loss
best_loss = min(val_loss, best_loss)
if not is_best:
epochs_since_improvement += 1
print("\nEpochs since last improvement: %d\n" % (epochs_since_improvement,))
else:
epochs_since_improvement = 0
# Save checkpoint
save_checkpoint(epoch, epochs_since_improvement, model, optimizer, val_loss, best_loss, is_best)
if __name__ == '__main__':
main()
Loaded base model.
/opt/conda/lib/python3.6/site-packages/torch/nn/_reduction.py:49: UserWarning: size_average and reduce args will be deprecated, please use reduction='none' instead.
warnings.warn(warning.format(ret))
Epoch: [0][0/200] Batch Time 1.336 (1.336) Data Time 0.145 (0.145) Loss 21.1961 (21.1961)
[0/200] Batch Time 0.127 (0.127) Loss 4.8454 (4.8454)
* LOSS - 13.931
Epoch: [1][0/200] Batch Time 0.188 (0.188) Data Time 0.137 (0.137) Loss 7.1951 (7.1951)
[0/200] Batch Time 0.127 (0.127) Loss 53.9689 (53.9689)
* LOSS - 15.314
Epochs since last improvement: 1 Epoch: [2][0/200] Batch Time 0.201 (0.201) Data Time 0.153 (0.153) Loss 58.9795 (58.9795) [0/200] Batch Time 0.134 (0.134) Loss 4.1666 (4.1666) * LOSS - 14.845
Epochs since last improvement: 2 Epoch: [3][0/200] Batch Time 0.185 (0.185) Data Time 0.139 (0.139) Loss 3.7385 (3.7385) [0/200] Batch Time 0.123 (0.123) Loss 41.0693 (41.0693) * LOSS - 19.491
Epochs since last improvement: 3 Epoch: [4][0/200] Batch Time 0.192 (0.192) Data Time 0.148 (0.148) Loss 4.8312 (4.8312) [0/200] Batch Time 0.123 (0.123) Loss 4.1246 (4.1246) * LOSS - 12.118
Each frame is a cluster. Each cluster is trained with a threshold min_score. If this threshold is too large, each pixel is classified as a unique cluster, resulting in no frames. If this threshold is too small, each pixel is over-classified, resulting in many frames.
Two frames may have overlap parts, which is determined by max_overlap. Note that max_overlap is useful only if you have larger than 2 frames. If max_overlap is too large, overlap in frames is relatively lenient - two frames may be even same if you set max_overlap = 1.. When max_overlap is small, frames are more independent.
The top_k defines the number of frames. If you only have one cluster, a huge top_k is of no use. But smaller top_k can compensate the inaccuracy of classification by min_score.
def find_intersection(set_1, set_2):
"""
Find the intersection of every box combination between two sets of boxes that are in boundary coordinates.
:param set_1: set 1, a tensor of dimensions (n1, 4)
:param set_2: set 2, a tensor of dimensions (n2, 4)
:return: intersection of each of the boxes in set 1 with respect to each of the boxes in set 2, a tensor of dimensions (n1, n2)
"""
# PyTorch auto-broadcasts singleton dimensions
lower_bounds = torch.max(set_1[:, :2].unsqueeze(1), set_2[:, :2].unsqueeze(0)) # (n1, n2, 2)
upper_bounds = torch.min(set_1[:, 2:].unsqueeze(1), set_2[:, 2:].unsqueeze(0)) # (n1, n2, 2)
intersection_dims = torch.clamp(upper_bounds - lower_bounds, min=0) # (n1, n2, 2)
return intersection_dims[:, :, 0] * intersection_dims[:, :, 1] # (n1, n2)
计算完相交的部分后,计算IoU便比较简单,只需要用相交部分除以相并的部分
def find_jaccard_overlap(set_1, set_2):
"""
Find the Jaccard Overlap (IoU) of every box combination between two sets of boxes that are in boundary coordinates.
:param set_1: set 1, a tensor of dimensions (n1, 4)
:param set_2: set 2, a tensor of dimensions (n2, 4)
:return: Jaccard Overlap of each of the boxes in set 1 with respect to each of the boxes in set 2, a tensor of dimensions (n1, n2)
"""
# Find intersections
intersection = find_intersection(set_1, set_2) # (n1, n2)
# Find areas of each box in both sets
areas_set_1 = (set_1[:, 2] - set_1[:, 0]) * (set_1[:, 3] - set_1[:, 1]) # (n1)
areas_set_2 = (set_2[:, 2] - set_2[:, 0]) * (set_2[:, 3] - set_2[:, 1]) # (n2)
# Find the union
# PyTorch auto-broadcasts singleton dimensions
union = areas_set_1.unsqueeze(1) + areas_set_2.unsqueeze(0) - intersection # (n1, n2)
return intersection / union # (n1, n2)
def NMS(n_classes, predicted_scores, min_score, decoded_locs, max_overlap, image_boxes,
image_labels, image_scores):
for c in range(1, n_classes):
# Keep only predicted boxes and scores where scores for this class are above the minimum score
class_scores = predicted_scores[i][:, c] # (8732)
score_above_min_score = class_scores > min_score # torch.uint8 (byte) tensor, for indexing
n_above_min_score = score_above_min_score.sum().item()
if n_above_min_score == 0:
continue
class_scores = class_scores[score_above_min_score] # (n_qualified), n_min_score <= 8732
class_decoded_locs = decoded_locs[score_above_min_score] # (n_qualified, 4)
# Sort predicted boxes and scores by scores
class_scores, sort_ind = class_scores.sort(dim=0, descending=True) # (n_qualified), (n_min_score)
class_decoded_locs = class_decoded_locs[sort_ind] # (n_min_score, 4)
# Find the overlap between predicted boxes
overlap = find_jaccard_overlap(class_decoded_locs, class_decoded_locs) # (n_qualified, n_min_score)
# Non-Maximum Suppression (NMS)
# A torch.uint8 (byte) tensor to keep track of which predicted boxes to suppress
# 1 implies suppress, 0 implies don't suppress
suppress = torch.zeros((n_above_min_score), dtype=torch.uint8).to(device) # (n_qualified)
# Consider each box in order of decreasing scores
for box in range(class_decoded_locs.size(0)):
# If this box is already marked for suppression
if suppress[box] == 1:
continue
# Suppress boxes whose overlaps (with this box) are greater than maximum overlap
# Find such boxes and update suppress indices
suppress = torch.max(suppress, overlap[box] > max_overlap)
# The max operation retains previously suppressed boxes, like an 'OR' operation
# Don't suppress this box, even though it has an overlap of 1 with itself
suppress[box] = 0
# Store only unsuppressed boxes for this class
image_boxes.append(class_decoded_locs[1 - suppress])
image_labels.append(torch.LongTensor((1 - suppress).sum().item() * [c]).to(device))
image_scores.append(class_scores[1 - suppress])
我们都晓得java实现线程2种方式,一个是继承Thread,另一个是实现Runnable。
模拟窗口买票,第一例子继承thread,代码如下
package thread;
public class ThreadTest {
public static void main(String[] args) {
Thread1 t1 = new Thread1(
#include<iostream>
using namespace std;
//辅助函数,交换两数之值
template<class T>
void mySwap(T &x, T &y){
T temp = x;
x = y;
y = temp;
}
const int size = 10;
//一、用直接插入排
对日期类型的数据进行序列化和反序列化时,需要考虑如下问题:
1. 序列化时,Date对象序列化的字符串日期格式如何
2. 反序列化时,把日期字符串序列化为Date对象,也需要考虑日期格式问题
3. Date A -> str -> Date B,A和B对象是否equals
默认序列化和反序列化
import com
1. DStream的类说明文档:
/**
* A Discretized Stream (DStream), the basic abstraction in Spark Streaming, is a continuous
* sequence of RDDs (of the same type) representing a continuous st
ReplayingDecoder是FrameDecoder的子类,不熟悉FrameDecoder的,可以先看看
http://bylijinnan.iteye.com/blog/1982618
API说,ReplayingDecoder简化了操作,比如:
FrameDecoder在decode时,需要判断数据是否接收完全:
public class IntegerH
1.js中用正则表达式 过滤特殊字符, 校验所有输入域是否含有特殊符号function stripscript(s) { var pattern = new RegExp("[`~!@#$^&*()=|{}':;',\\[\\].<>/?~!@#¥……&*()——|{}【】‘;:”“'。,、?]"
经常在写shell脚本时,会碰到要以另外一个用户来执行相关命令,其方法简单记下:
1、执行单个命令:su - user -c "command"
如:下面命令是以test用户在/data目录下创建test123目录
[root@slave19 /data]# su - test -c "mkdir /data/test123"


 image
image image
image