【路径生成+轨迹优化--apollo无人驾驶规划器】Lattice planner算法
系列文章目录
提示:这里可以添加系列文章的所有文章的目录,目录需要自己手动添加
TODO:写完再整理
文章目录
- 系列文章目录
- 前言
- Lattice planner一些基本概念
- Frenet坐标
- ST图
- 路径规划--速度规划
- ST轨迹的终止状态
- Lattice规划
- Lattice轨迹生成
- 一、Lattice planner算法原理--【Search graph】在地图上如何构建一张图(graph)或树(tree)?
-
- 1.方法一:通过离散控制空间进行采样的方法【control lattice search】
-
- (1)算法步骤
- (2)算法优点
- (3)算法缺点
- (4)无人车的离散控制空间lattice方法举例
- (5)无人机的离散控制空间lattice方法举例
- 2.方法二:通过离散状态空间进行采样的方法【state lattice search】
-
- (1)算法步骤
- (2)算法优点
- (3)算法缺点
- 3.control lattice search和state lattice search两种算法的对比
- 二、Lattice planner算法原理--【Search tree】在图或树上进行路径搜索?
-
- 1.启发式函数的设计
- 三、基于Frenet坐标系的lattice算法(lattice in Frenet Frame)
-
- 1.把世界坐标系下的xy坐标转换成车坐标系的sl坐标系
- 2.Planning in Frenet-serret frame参考链接
- 四、Lattice planner的改进方法
- 五、Lattice planner总结
- Lattice planner论文
- Lattice planner的autoware视频
前言
认知有限,望大家多多包涵,有什么问题也希望能够与大家多交流,共同成长!在项目和平时的学习中,我对机器人/无人驾驶的决策规划模块进行了划分,当然划分的方法有很多,我的划分方式仅供参考
(1)动态障碍物行为预测模块(Behavior prediction)–结合感知和高精度地图信息,估计周围障碍物未来运动状态
(2)执行机构的轨迹规划模块(Trajectory_planning)–执行机构如机器人载体上的机械臂、串行云台等的运动轨迹规划
(3)任务决策模块(Mission_planning)–任务决策模块比较偏业务层了,处理机器人/无人驾驶的各种任务,主要分为三个方面:车底盘航线业务决策(交规、横向换道等等)、执行应用机构业务决策(机械臂、人机交互等等)、不同场景的导航方案切换决策(组合导航、融合导航)
(4)前端路径探索模块(path_finding)–全局路径规划算法难度不算复杂,找到一条可通行的(必须满足)、考虑动力学的(尽可能满足)、可以是稀疏的路径base_waypoints【由于其只考虑了环境几何信息,往往忽略了无人机本身的运动学与动力学模型。因此,其得到的轨迹往往显得比较“突兀”,并不适合直接作为无人机的控制指令】
(5)后端轨迹处理模块(motion_planning)–我主要归纳整理为三个方向:(1)对base_waypoints进行简单处理及生成方向、(2)对base_waypoints轨迹优化方向【一般是二次优化,这里用的较多的事优化方面的知识】、(3)进行对应功能的replan方向(replan之前的预处理、进入replan的条件、停障replan、避障replan、纠偏replan、换道replan、自动泊车replan、穿过狭窄道路replan等等),这部分内容使用的方法比较专
(6)路径跟踪模块(trajectory_following)–这个模块就得针对机器人载体了,如无人驾驶使用得阿克曼模型可以采用几何的pure pursuit纯追踪算法,更好的可以用模型预测控制MPC方法,还有强化学习做的(效果怎样我就没验证过了);当然也可能事麦克纳姆轮车、差速车PID、还有无人机的三维轨迹跟踪等等
(7)碰撞检测模块
(8)集群多机器人规划模块
当然,这种划分方式是我权衡了原理和功能粗略划分的,在实际产品研发过程中,需要理解了各个算法的功能和定位的基础上融汇贯通,不能生搬硬套,如全段通过hybrid A探索出来的路径与A、RRT*探索出来的路径更平滑,后端轨迹优化的任务就不用这么重了;又如,机器人/无人驾驶项目研发的需求业务还没发展到能响应很多功能阶段,任务决策使用简单的状态机(fsm)就可以对现有任务进行状态转移了
本文先对Lattice planner算法做个简单的介绍,具体内容后续再更,其他模块可以参考去我其他文章
提示:以下是本篇文章正文内容

Lattice planner一些基本概念
Frenet坐标
Frenet坐标系描述了汽车相对于道路的位置,s代表沿道路的距离,也称为纵坐标,d表示与纵向线的位移,也被称为横坐标,纵坐标表示在道路中行驶距离,横坐标表示汽车偏离中心线的距离。
.
.
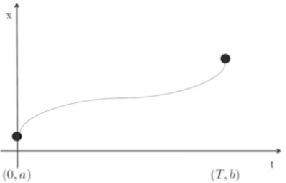
ST图
ST图可以帮助我们设计和选择速度曲线,“s”表示车辆的纵向位移,“t”表示时间,ST图上的曲线是对车辆运动的描述,因为它说明了车辆在不同时间的位置,由于速度是位置变化的速率,,因此可以通过曲线的斜率从ST图上推断速度,斜坡越陡说明在短时间内有更大的移动对应更快的速度
.
.
路径规划–速度规划
在ST图内可以将障碍物绘制为在特定时间段内阻挡道路部分的矩形,速度曲线不得与矩形相交。
路径-速度解耦规划将轨迹规划分为两步:路径规划和速度规划。
路径规划:生成候选曲线,这是车辆可行驶的路径,使用代价函数对每条路径进行评估,该函数包括平滑度、安全性、与车道中心的偏离等等,按代价对路径进行排名,并选择代价最低的路径。
速度规划:确定沿这条路径行进的速度,可以使用优化功能为路径选择受到各种限制约束的良好速度曲线
.
.
ST轨迹的终止状态
根据情况可以将状态分为三组巡航、跟随与停止。
.
.
Lattice规划
通过Frebet坐标可将环境投射到纵轴和横轴上,目标是生成三维轨迹:纵向维度、横向维度和时间维度。整个三维问题可以分解成两个单独的二维问题,即通过分离轨迹的纵向和横向分量来解决,一个二维轨迹是指具有时间戳的纵向轨迹(ST轨迹),另一个二维轨迹相对于纵向轨迹的横向偏移(SL轨迹)。Lattice规划分为两步:先分别建立ST和SL轨迹再将它们合并。为生成纵向和横向的二维轨迹,先将初始车辆投射到ST和SL坐标系中,通过预选模式中的多个候选最终状态进行采样,选择最终车辆状态,对于每个车辆最终状态,须创建一组轨迹,将车辆从初始状态转换为最终状态,并通过代价函数选择代价最低的轨迹
.
.
Lattice轨迹生成
一旦同时拥有了ST和SL轨迹,就需要将它们重新转化为笛卡尔坐标,然后将它们相结合,构建由二维路径点和一维时间戳组成的三维轨迹,ST轨迹是随时间变化的纵向位移,SL纵向轨迹上每个点的横向偏移,两条轨迹都有纵坐标S,可以通过将S值进行匹配来合并轨迹
.
.
一、Lattice planner算法原理–【Search graph】在地图上如何构建一张图(graph)或树(tree)?
1.方法一:通过离散控制空间进行采样的方法【control lattice search】
【正向方法–以车当前控制状态为起点探索车可执行的路径】
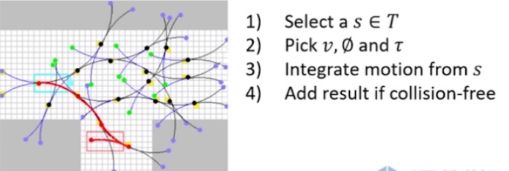
(1)算法步骤
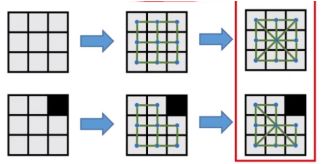
0)步骤0:栅格地图的4/8/16连接进行控制状态空间的离散【防盗标记–盒子君hzj】
【控制状态空间的方法】->【图搜索的方法】
1)步骤一:建立机器人的模型【模型用状态方程表示】
![]()
其中s是机器人的当前状态(s可以包含x,y及其速度),u是机器人的控制输入
2)步骤二:清楚机器人的初始状态s0
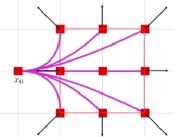
3)步骤三:通过选择多个不同的控制输入量u与合适的控制周期T,【防盗标记–盒子君hzj】可以正向模拟仿真出机器人多条下一步的路径(状态s),最后选择一条符合约束的,代价最低的一条路径
【核心思想:给定多个采样的控制量u【控制量是有限幅的】 -> 模拟规划多条路径后选择一条 -> 正解机器人最终状态】
(2)算法优点
这种规划方法比较容易实现,知道机器人的模型就可以正解出多条轨迹
![]()
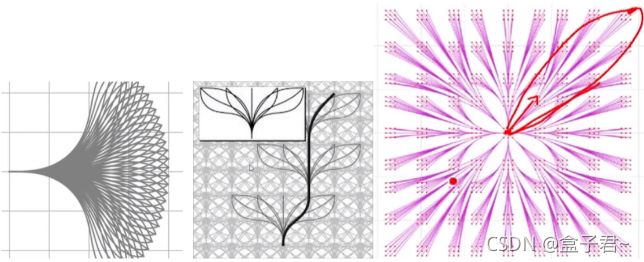
(3)算法缺点
(1)这种规划方法的控制量输入是随机的,没有到达目标点任务导向性的,【防盗标记–盒子君hzj】发散性的去搜索的,因此规划的效率较低
(2)这种规划方法的规划出来的路径比较集群,不能很好的覆盖到实际的场景,容易出现一条路径不可行是其他候选的路径也不可行的情况
(4)无人车的离散控制空间lattice方法举例
基本思路:
先建立车底盘的动力学模型,再离散化车底盘的控制量(给不同方向的方向盘打角和油门大小),从而得到车的不同行驶轨迹
无人车的状态假设为:
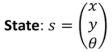
无人车的控制输入假设为:
![]()
得到的无人车的状态方程为:

给定无人机的初始速度为(直往前走):
![]()
通过离散化速度输入,得到再控制周期T的无人机运动轨迹
lattice graph生成图的方法
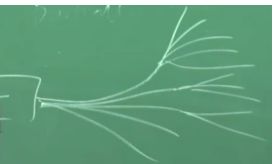
(1)若某一个时刻对控制量进行9次采样,得到模拟的九条路径(如图所示)
1)非启发式探索的路径
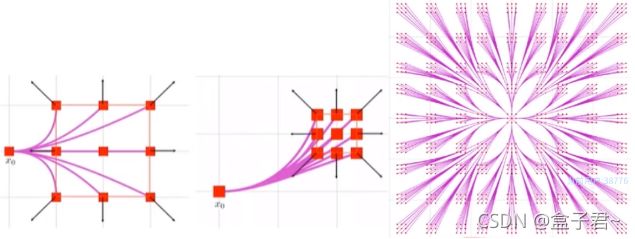
2)启发式探索的路径
(2)若某一个时刻对控制量进行25次采样,得到模拟的25条路径(如图所示)

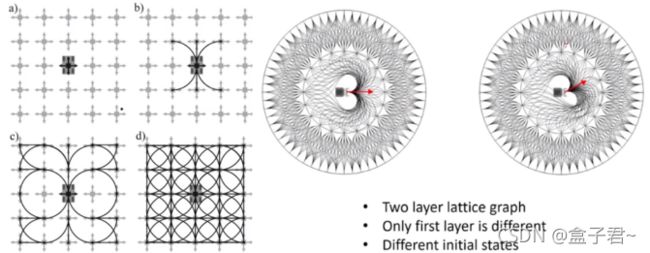
(5)无人机的离散控制空间lattice方法举例
无人机的状态假设为:

无人机的控制输入假设为:
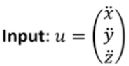
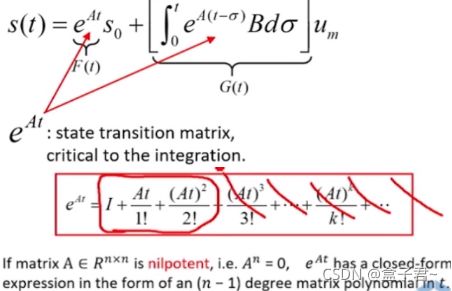
得到的无人机的状态方程为:
![]()
其中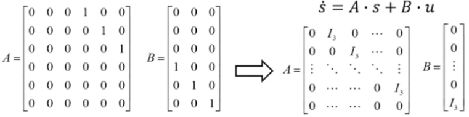
给定无人机的初始速度为:

通过离散化加速度输入,得到再控制周期T的无人机运动轨迹如下:
无人机的运动轨迹可以通过状态转移方程计算得到:(状态转移方程包括了零输入响应和零状态响应两个部分)
2.方法二:通过离散状态空间进行采样的方法【state lattice search】
【反向方法–以环境当前空间状态为起点探索车可执行的路径】
(1)算法步骤
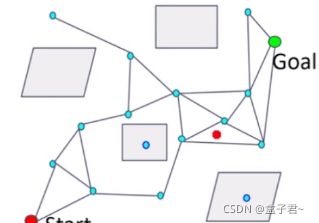
(0)步骤0:PRM随机均匀采样进行状态空间的离散【防盗标记–盒子君hzj】
离散状态空间采样的方法当然也可以不使用PRM,举个例子用来在状态空间采样而已
1)步骤一:建立机器人的模型【模型用状态方程表示】
![]()
其中s是机器人的当前状态(s可以包含x,y及其速度),u是机器人的控制输入
2)步骤二:清楚机器人的初始状态s0
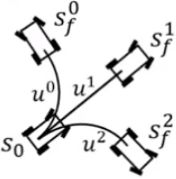
3)步骤三:通过先确定机器人目标的状态Sf,再找到一条连接起点和目标点的路径,进而确定控制量u与控制周期T
【核心思想:给定多个采样的机器人最终状态 -> 探索规划多条路径后选择一条 -> 反解控制量u】
3.1)lattice graph生成图的方法
3.2)给定起始状态和最终状态,反解出可行轨迹【较核心,当然反解的方法也不止下面几种】
方法一:Boundary Value Problem(BVP)边界值的方法
【本质是解一个高维的线性方程A=BX–待定系数法求解】【防盗标记–盒子君hzj】
(1)目的:给定起始状x(0)=a 和最终状态x(T)=b,反解出可行轨迹x(t)
(2)步骤
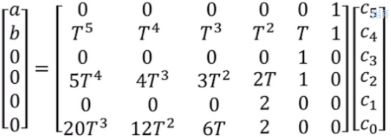
1)假设可行轨迹可以用5阶的多项式函数进行拟合【当然可以用其他函数拟合】
![]()
2)给定起始值和最终值的边界条件

3)通过待定系数法求解高维的线性方程B=AX【把C1~C5都解出来即可以得到可行轨迹的表达式】
方法二:Optimal Boundary Value Problem (OBVP)最优边界值方法
【本质是通过优化的方法进行轨迹反解–极小值原理(minimun principle)求解】【防盗标记–盒子君hzj】
(1)论文参考
Optimal Rough Terrain Trajectory Generation for Wheeled Mobile Robots, Thomas M. Howard Alonzo Kelly
(2)步骤
1)建模Modelling
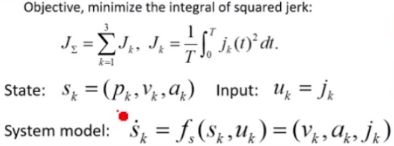
2)通过优化的方法反解
其中:

3.3)给定可行轨迹,反解控制量u的方法
(1)纯跟踪算法的(pure_puresuit)
(2)MPC的方法
(2)算法优点
这种规划方法有比较好的目标点任务导向的,效率比较高
(3)算法缺点
这种规划方法需要根据起始点和目标点反解轨迹、【防盗标记–盒子君hzj】控制量u和控制周期T,相对控制空间control lattice search的方法来说没有那么容易实现。当然反解的方法也有很多
…
.
.
.
3.control lattice search和state lattice search两种算法的对比
放图就懂了~
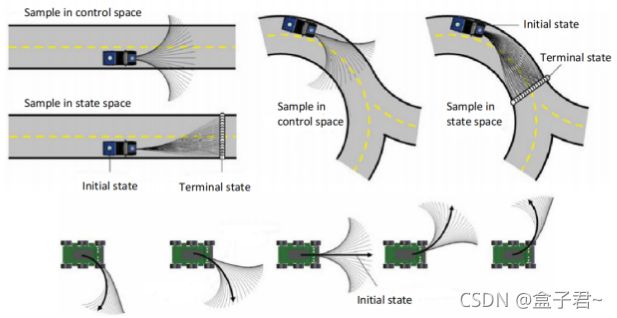
论文参考
State Space Sampling of Feasible Motions for High-Performance Mobile Robot Navigation in Complex Environments, Thomas M. Howard, Colin J. Green, and Alonzo Kelly
.
.
.
二、Lattice planner算法原理–【Search tree】在图或树上进行路径搜索?
1.启发式函数的设计
可以借鉴A*等的图搜索的算法法框架来实现~
三、基于Frenet坐标系的lattice算法(lattice in Frenet Frame)
1.把世界坐标系下的xy坐标转换成车坐标系的sl坐标系
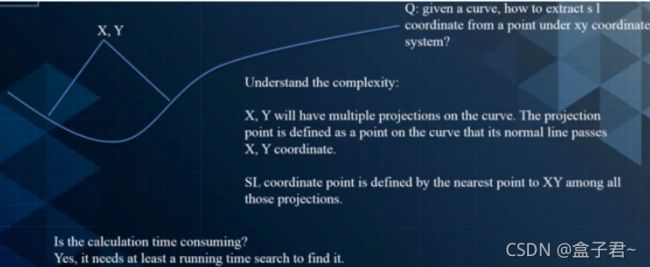
sl坐标系转xy坐标系是唯一的,xy坐标系转sl坐标系不是唯一的,但是有约束的时候可以是唯一的
xy坐标系转sl坐标系的转换过程相对复杂,推导不要去推,记住转换结果会用就好
2.Planning in Frenet-serret frame参考链接
https://pythonrobotics.readthedocs.io/en/latest/modules/path_planning.html#optimal-trajectory-in-a-frenet-frame
四、Lattice planner的改进方法
探索路径之前先撒点,再连线,这样可以有效减少参数,简化计算了

五、Lattice planner总结
(1)非结构化场景和局部规划的场景可以用一下
(2)时间和空间离散化后,参数呈指数增长
Lattice planner论文

Lattice planner的autoware视频
https://www.bilibili.com/video/BV1Fy4y187P4?spm_id_from=333.999.0.0