【VisionMaster】二次开发之第三方库的使用
VisionMaster 支持使用第三方算法来丰富自身的功能。这里使用OpenCV作为第三方库作为样例进行说明。
1. 生成算子框架
1.1 启动自定义模块生成工具
- 打开VisionMaster,并找到
菜单栏 >> 工具菜单 >> 自定义模板生成工具

- 打开`自定义模块生成工具

1.2 自定义模块生成工具参数说明
1.2.1 算法模块输入输出XML配置
-
VM版本
指定为哪一个版本的VisionMaster开发自定义模块,当前支持VM3.X与VM4.X,根据需要进行选择 -
模块名称
开发自定义模块的名称,尽量保证见词达意 -
输入图像
自定义模块是否支持图像输入,即是否包含下图中的输入。
-
位置修正信息
是否支持使用位置修正模块对该模块进行ROI的动态跟随。
-
模块状态
只是模块的运行状态,运行成功为1,运行失败为0。

-
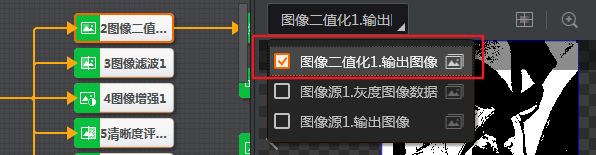
图像输出
指定该模块是否有输出图像。具有输出图像的模块,可在显示窗口的选择栏中进行选择显示
-
自定义输入输出
用于定义一些输入输出参数,该试用版本目前仅支持int、float与string三种类型。 -
输入参数

-
输入参数说明>

- 参数名称
代码中获取或设置该参数时使用的名称 - 显示名称
UI界面上显示的名称 - 参数类型
参数的类型,在代码中获取参数时,需要根据类型选择对应的函数 - 输入/输出
指定该参数是用于输入还是输出 - 输出参数

- 参数名称
-
结果显示
用于自定输出参数的显示,点击下图中的更新自定义输出按钮会将自定义输出进行同步

同步后,如下图:

如果仅仅完成这些操作,数据不会被输出到VisionMaster的显示区域。为将数据显示到显示区域,需要选中输出参数前的复选框。如下图:

- 当前结果

- 当前结果

- 历史结果


- 文本显示

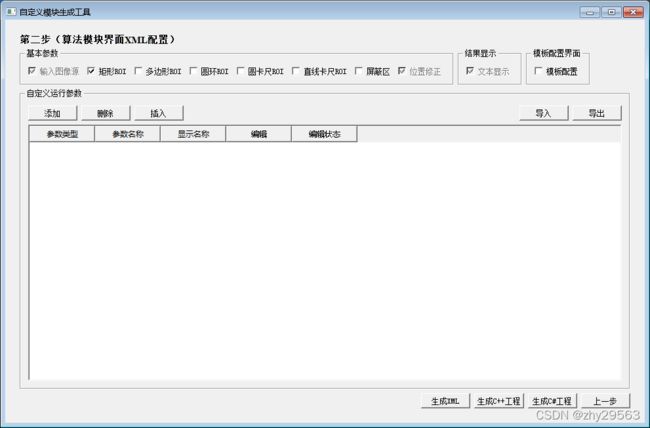
1.2.2 算法模块界面XML配置
-
基本参数
-
输入图像源
不可更改,与算法模块输入输出XML配置中的输入图像源参数保持一致 -
矩形ROI

-
多边形ROI

-
圆环ROI

-
圆卡尺ROI

-
直线卡尺ROI

-
屏蔽区

-
位置修正
不可更改,与算法模块输入输出XML配置中的位置修正参数保持一致
-
-
结果显示
- 文本显示
不可更改,受算法模块输入输出XML配置中的文本显示参数的影响。如果在算法模块输入输出XML配置中的文本显示处至少勾选了一个输出参数,则此处默认勾选。否则,反之。
- 文本显示
-
模板配置界面
- 模板配置
是否在配置中插入特征模板选项卡。

- 模板配置
-
自定义运行参数
用于添加模块所使用的算法的参数。点击添加按钮,增加如下一个参数:

在选择参数类型,输入参数名称与显示 名称之后,点击编辑列中对应项的单击编辑按钮,弹出通用类型对话框。

点击通用类型对话框,中的确定按钮后,关闭此对话框,并更新编辑状态列中对应项的状态。

支持一下类型:- int
- float
- bool
- string
- enumeration
- intBetween
- floatBetween
-
命令按钮
- 生成XML
用于生成自定义模块的相关配置 - 生成C++工程
用于生成自定义模块的算法工程 - 生成C#工程
用于生成自定义模块的UI工程
依次点击这个三个命令后,生成如下文件

- 生成XML
2. 编译工程
2.1 编译UI工程
- 使用
VS2013及其以上版本打开CustomedModule_CsProj\CustomedModuleCs\CustomedModuleCs.sln。注意,该工程需要.NET4.6.1的支持 - 将编译类型切换为
Any CPU+Release
- 编译
CustomedModuleCs工程

- 将生成的
CustomedModuleCs.dll拷贝到使用工具生成的CustomedModule文件夹中

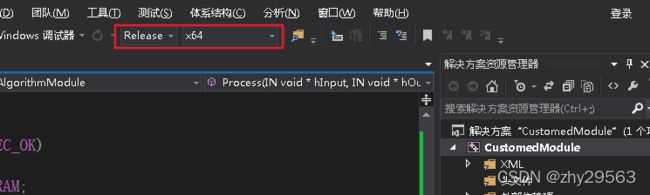
2.2 编译算法工程
- 使用
VS2013及其以上版本打开CustomedModule_CProj\CustomedModule\CustomedModule.sln。 - 属性页配置
Release+x64

- 配置OpenCV头目录

- 配置OpenCV库目录

- 配置OpenCV依赖项

- 切换编译配置到
Release+x64,并生成工程。

- 打开源文件
AlgorithmModule.cpp - 添加OpenCV头文件
#include - OpenCV::Mat与HKA_IMAGE互转
Mat HKAImageToMat(HKA_IMAGE hik_image)
{
Mat mat;
if (hik_image.format == HKA_IMG_MONO_08)
{
mat = Mat(hik_image.height, hik_image.width, CV_8UC1, hik_image.data[0]);
int a = mat.cols;
}
else if (hik_image.format == HKA_IMG_RGB_RGB24_C3)
{
mat = Mat(hik_image.height, hik_image.width, CV_8UC3, hik_image.data[0]);
}
return mat;
}
HKA_IMAGE MatToHKAImage(Mat mat)
{
HKA_IMAGE image;
if (mat.channels() == 1)
{
image = { HKA_IMG_MONO_08, 0 };
image.width = mat.cols;
image.height = mat.rows;
image.format = HKA_IMG_MONO_08;
image.step[0] = mat.cols;
image.data[0] = mat.data;
}
else if (mat.channels() == 3)
{
image = { HKA_IMG_RGB_RGB24_C3, 0 };
image.width = mat.cols;
image.height = mat.rows;
image.format = HKA_IMG_RGB_RGB24_C3;
image.step[0] = 3 * mat.cols;
image.data[0] = mat.data;
}
return image;
}
- 根据模块要求修改
CAlgorithmModule::Process函数,这里仅演示二值化功能
int CAlgorithmModule::Process(IN void* hInput, IN void* hOutput, IN MVDSDK_BASE_MODU_INPUT* modu_input)
{
OutputDebugStringA("###Call CAlgorithmModule::Proces -->begin\n");
int nErrCode = 0;
// 1.获取图像
HKA_IMAGE struInputImg;
HKA_S32 nRet = IMVS_EC_UNKNOWN;
HKA_U32 nImageStatus = 0;
do
{
nRet = VmModule_GetInputImageByName(hInput, "InImage", "InImageWidth", "InImageHeight", "InImagePixelFormat", &struInputImg, &nImageStatus);
HKA_CHECK_BREAK(IMVS_EC_OK != nRet);
} while (0);
// 2. 图像转换
Mat input_image = HKAImageToMat(struInputImg);
// 3. 获取输入参数
int count = -1;
int inputInt = -1;
nRet = VM_M_GetInt(hInput, "InputInt", 0, &inputInt, &count);
float inputFloat = 0;
nRet = VM_M_GetFloat(hInput, "InputFloat", 0, &inputFloat, &count);
int inputString1Length = 100;
char inputString1[100];
nRet = VM_M_GetString(hInput, "InputString", 0, inputString1, 100, &inputString1Length, &count);
// 4. 获取运行参数
auto runParam1 = this->m_nRunInt;
// 5. 算法处理
OutputDebugStringA("###Call CAlgorithmModule::Proces --> do algorighm process\n");
Mat binary;
cv::threshold(input_image, binary, 128, 255, cv::THRESH_BINARY);
// 6. 输出图像格式转换
HKA_IMAGE output_image = MatToHKAImage(binary);
// 7. 输出图像
if (MVD_PIXEL_MONO_08 == modu_input->pImageInObj->GetPixelFormat())
{
VmModule_OutputImageByName_8u_C1R(hOutput, 1, "OutImage", "OutImageWidth", "OutImageHeight", "OutImagePixelFormat", &output_image);
}
else if (MVD_PIXEL_RGB_RGB24_C3 == modu_input->pImageInObj->GetPixelFormat())
{
VmModule_OutputImageByName_8u_C3R(hOutput, 1, "OutImage", "OutImageWidth", "OutImageHeight", "OutImagePixelFormat", &output_image);
}
// 8. 设置自定义输出参数
VM_M_SetInt(hOutput, "OutputInt", 0, 77);
VM_M_SetFloat(hOutput, "OutputFloat", 0, 3.1425f);
VM_M_SetString(hOutput, "OutputString", 0, "OK");
// 9. 设置模块运行状态
VM_M_SetInt(hOutput, "ModuStatus", 0, nErrCode == 0 ? 1 : nErrCode);
if (nErrCode != IMVS_EC_OK)
{
return IMVS_EC_PARAM;
}
/************************************************/
//默认算法时间20ms,根据实际时间计算
MODULE_RUNTIME_INFO struRunInfo = { 0 };
struRunInfo.fAlgorithmTime = 20;
VM_M_SetModuleRuntimeInfo(m_hModule, &struRunInfo);
OutputDebugStringA("###Call CAlgorithmModule::Proces end\n");
return IMVS_EC_OK;
}
-
编译生成算法工程
-
将生成的
CustomedModule.dll与CustomedModule.pdb文件拷贝到使用工具生成的CustomedModule文件夹中

-
完整源码
#include "stdafx.h"
#include "AlgorithmModule.h"
#include 3. 模块导入
- 将
CustomedModule文件夹拷贝到C:\Program Files\VisionMaster4.0.0\Applications\Module(sp)\x64\UserTools文件夹中
- 拷贝
opencv_world310.dll到C:\Program Files\VisionMaster4.0.0\Applications\PublicFile\x64。如果将自定义模块拖拽到流程图中提示找不到模块,需要重启电脑。

4. 模块测试
- 将自定义工具拖入流程图中

- 配置类似如下的方案

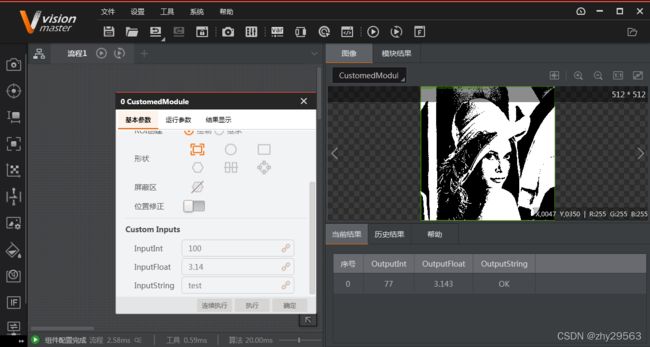
- 打开自定义模块,显示如下

- 配置自定义输入参数

- 点击运行按钮,查看结果
5. 调试自定义模块算法
-
配置好方案,并打开自定模块
-
用
VS2013及其以上版本打开算法工程 -
选择
附件到进程

-
选择
VmModuleProxy.exe

-
在源代码的合适位置,打上
断点

-
运行自定义模块

-
查看是否进入断点调试中
