%% Non-Local Means滤波器
clc,clear,close all % 清理命令区、清理工作区、关闭显示图形
warning off % 消除警告
feature jit off % 加速代码运行
[filename ,pathname]=...
uigetfile({'*.bmp';'*.tif';'*.jpg';},'选择图片'); %选择图片路径
str=[pathname filename]; % 合成路径+文件名
im = imread(str); % 读图
im = im(60:250,60:200); % 截取部分分析,考虑背景像素0(黑色)的影响
% 转化为灰度图像
if size(im,3)==1
im = im;
else
im = rgb2gray(im);
end
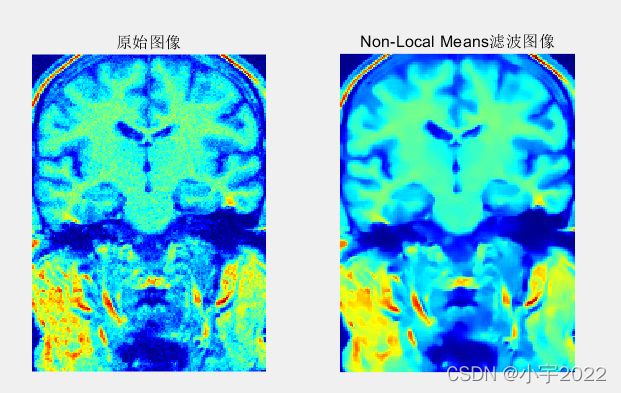
im = imnoise(im,'gaussian',0,1e-3); % 原图像 + 白噪声
D = Non_Local_Means(im,3,3,0.15); % 应用Non-Local Means滤波图像
figure,
subplot(121),imshow(im);title('原始图像')
colormap(jet) % 颜色
shading interp % 消隐
subplot(122),imshow(D,[]);title('Non-Local Means滤波图像')
colormap(jet) % 颜色
shading interp % 消隐
function DeNimg = Non_Local_Means(Nimg,PSH,WSH,Sigma)
% Non_Local_Means滤波器
%函数输入:
% Nimg: 输入的图像矩阵 + 带噪声的
% PSH: 扩展窗尺寸大小
% WSH: 窗尺寸大小
% Sigma:方差
%函数输出:
% DeNimg: 重构滤波图像
if ~isa(Nimg,'double')
Nimg = double(Nimg)/255;
end
% 图像维数
[Height,Width] = size(Nimg);
u = zeros(Height,Width); % 初始化去噪图像矩阵
M = u; % 初始化权值矩阵
Z = M; % 初始化叠加权值 accumlated weights
% 避免边界效应
PP = padarray(Nimg,[PSH,PSH],'symmetric','both');
PW = padarray(Nimg,[WSH,WSH],'symmetric','both');
% padarray使用
% A =
% 1 3 4
% 2 3 4
% 3 4 5
% B = padarray(A, 2 * [1 1], 0, 'both')
% 0 0 0 0 0 0 0
% 0 0 0 0 0 0 0
% 0 0 1 3 4 0 0
% 0 0 2 3 4 0 0
% 0 0 3 4 5 0 0
% 0 0 0 0 0 0 0
% 0 0 0 0 0 0 0
% 主循环
for dx = -WSH:WSH
for dy = -WSH:WSH
if dx ~= 0 || dy ~= 0
Sd = integral_img(PP,dx,dy); % 插值图像
% 获取对应像素点的平方差矩阵
SDist = Sd(PSH+1:end-PSH,PSH+1:end-PSH)+Sd(1:end-2*PSH,1:end-2*PSH)-Sd(1:end-2*PSH,PSH+1:end-PSH)-Sd(PSH+1:end-PSH,1:end-2*PSH);
% 计算每一个像素点的权值
w = exp(-SDist/(2*Sigma^2));
% 得到相应的噪声点
v = PW((WSH+1+dx):(WSH+dx+Height),(WSH+1+dy):(WSH+dy+Width));
% 更新去噪图像矩阵
u = u+w.*v;
% 更新权值去噪图像矩阵
M = max(M,w);
% 更新叠加权值 accumlated weights
Z = Z+w;
end
end
end
% 重构图像
f = 1;
u = u+f*M.*Nimg;
u = u./(Z+f*M);
DeNimg = u; % 重构去噪图像
function Sd = integral_img(v,dx,dy)
% 根据平方差,插值图像
% 变换计算:tx = vx+dx; ty = vy+dy
t = img_Shift(v,dx,dy);
% 平方差图像
diff = (v-t).^2;
% 沿行插值
Sd = cumsum(diff,1); % 行叠加
% 沿列插值
Sd = cumsum(Sd,2); % 列叠加
function t = img_Shift(v,dx,dy)
% 在xy坐标系下,进行图像变换操作
t = zeros(size(v));
type = (dx>0)*2+(dy>0);
switch type
case 0 % dx<0,dy<0: 向右下方移动
t(-dx+1:end,-dy+1:end) = v(1:end+dx,1:end+dy);
case 1 % dx<0,dy>0: 向左下方移动
t(-dx+1:end,1:end-dy) = v(1:end+dx,dy+1:end);
case 2 % dx>0,dy<0: 向右上方移动
t(1:end-dx,-dy+1:end) = v(dx+1:end,1:end+dy);
case 3 % dx>0,dy>0: 向左上方移动
t(1:end-dx,1:end-dy) = v(dx+1:end,dy+1:end);
end