在ROS中使用行为树
在ROS中使用行为树
文章目录
- 在ROS中使用行为树
- 0、 学习本教程的前提
- 1、 behaviorTree 库安装(ROS使用下的安装方式)
- 2、 处理 behaviortree 库并准备好 service 和 ros action
-
- 2.1 对ROS 的 service 和 action 进行封装,使其在 behaviortree 上使用更加方便。
- 2.2 创建一个 service 和一个 action
- 2.3 创建与决策树相关的数据类型
- 2.4 修改`package.xml`文件
- 2.5 编写 `cmakeList.txt` 文件,并编译生成相关代码
- 3、 行为树开发
-
- 3.1 编写do_what 和 shoot 的 服务端代码
-
- 3.1.1 `do_what_service_server`
- 3.1.2 `shoot_action_server`
- 3.1.3 在`CmakeLists.txt` 添加 `do_what_service_server.cpp` 和 `shoot_action_server.cpp` 的 编译规则
- 3.2 行为树的实现
-
- 3.2.1 行为树的逻辑构建
- 3.2.2 行为树各个节点的实现 `tree_node.h` 、`tree_node.cpp`
- 3.2.3 注册行为树的各个叶节点,并运行行为树 `run_bh_tree.cpp`
- 3.2.4 在`CmakeLists.txt` 添加 `run_bh_tree.cpp` 的编译规则
- 3.3 编译整个工程
- 4、 测试行为树
0、 学习本教程的前提
note : 使用本教程前,建议先弄懂 behaviorTree的使用 ,ros server 的使用, ros action 的使用。
- ros server 的教程
- ros action 的教程
- BehaviorTree 教程
- BehaviorTree 源码
下载参考我提供的demo:demo链接
1、 behaviorTree 库安装(ROS使用下的安装方式)
sudo apt-get install ros-$ROS_DISTRO-behaviortree-cpp-v3
2、 处理 behaviortree 库并准备好 service 和 ros action
以本教程的 demo 为例子,讲解如何在ROS中使用行为树
2.1 对ROS 的 service 和 action 进行封装,使其在 behaviortree 上使用更加方便。
库的作者已经给出给出了一个demo ,直接复制就行,参考 官方教程, 可以对照参考我的教程和这份官方教程,理解更深。
步骤:将behaviortree_ros文件夹复制到 include 目录下,可以看到里面有bt_action_node.h 和 bt_service_node.h , 这两个头文件就是对 action 和 service 的 封装。
2.2 创建一个 service 和一个 action
- 在
srv文件夹中创建 服务do_what.srv - 在
action文件夹中创建 actionShoot.action
do_what.srv 这个服务的逻辑,通过剩余血量和子弹数量,判断机器人下一步该做什么
int32 blood
int32 remain_bullets
---
int32 dowhat
Shoot.action 这个 action 的逻辑,开枪动作,action过程中反馈正在开第几枪,action 结束后,返回是否打完子弹的结果
# Define the goal
int32 Number_of_shots # 一共打几枪
---
# Define the result
string finish # 打完没
---
# Define a feedback message
int32 Which_shot # 开到第几枪了
2.3 创建与决策树相关的数据类型
复制msg文件夹进来就行
2.4 修改package.xml文件
<package format="2">
<name>ros_behaviortree_demoname>
<version>0.0.0version>
<description>The ros_behaviortree_demo packagedescription>
<maintainer email="[email protected]">liaomaintainer>
<license>TODOlicense>
<buildtool_depend>catkinbuildtool_depend>
<build_depend>roscppbuild_depend>
<build_depend>std_msgsbuild_depend>
<build_depend>behaviortree_cpp_v3build_depend>
<build_depend>actionlibbuild_depend>
<build_depend>actionlib_msgsbuild_depend>
<build_depend>message_generationbuild_depend>
<build_depend>genmsgbuild_depend>
<build_export_depend>roscppbuild_export_depend>
<build_export_depend>actionlibbuild_export_depend>
<build_export_depend>actionlib_msgsbuild_export_depend>
<build_export_depend>std_msgsbuild_export_depend>
<build_export_depend>genmsgbuild_export_depend>
<exec_depend>roscppexec_depend>
<exec_depend>std_msgsexec_depend>
<exec_depend>behaviortree_cpp_v3exec_depend>
<exec_depend>actionlibexec_depend>
<exec_depend>actionlib_msgsexec_depend>
<exec_depend>message_generationexec_depend>
<exec_depend>genmsgexec_depend>
<export>
export>
package>
2.5 编写 cmakeList.txt 文件,并编译生成相关代码
note: 这一步做4件重要的事
- 生成 do_whta service 相关代码
- 生成 Shoot action 相关代码
- 生成 与行为树相关的数据类型
- 包含行为树库的路径
cmake_minimum_required(VERSION 3.0.2)
project(ros_behaviortree_demo)
set(CMAKE_CXX_STANDARD 14)
set(ROS_DEPENDENCIES
roscpp std_msgs
behaviortree_cpp_v3
actionlib_msgs
actionlib
message_generation
genmsg
)
# 包含行为树库的路径,同时还包含了创建action 和 service 相关的库
find_package(catkin REQUIRED COMPONENTS ${ROS_DEPENDENCIES})
# 生成与行为树相关的数据类型
add_message_files(
FILES
BehaviorTree.msg
NodeParameter.msg
NodeStatus.msg
StatusChange.msg
StatusChangeLog.msg
TreeNode.msg
)
# 生成 do_whta service 相关代码
add_service_files(
FILES
do_what.srv
)
# 生成 Shoot action 相关代码
add_action_files(
DIRECTORY action
FILES Shoot.action
)
# Generate added messages and services with any dependencies listed here
generate_messages(
DEPENDENCIES
std_msgs # Or other packages containing msgs
actionlib_msgs
)
catkin_package(
INCLUDE_DIRS include
LIBRARIES ros_behaviortree_demo
CATKIN_DEPENDS ${ROS_DEPENDENCIES}
# DEPENDS system_lib
)
include_directories(
include
${catkin_INCLUDE_DIRS}
)
编译
catkin build ros_behaviortree_demo # 如果没有安装catkin tools,那就用catkin_make
编译成功的话,可以看到生成的相关代码
3、 行为树开发
3.1 编写do_what 和 shoot 的 服务端代码
note: 这里与普通的ROS 服务端没区别
3.1.1 do_what_service_server
在src文件夹创建 do_what_service_server.cpp
#include 3.1.2 shoot_action_server
在 src 文件夹创建 shoot_action_server.cpp
#include 3.1.3 在CmakeLists.txt 添加 do_what_service_server.cpp 和 shoot_action_server.cpp 的 编译规则
# 编译 do_what_service_server
add_executable(do_what_service_server src/do_what_service_server.cpp)
add_dependencies(do_what_service_server ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS} ros_behaviortree_demo_gencpp)
target_link_libraries(do_what_service_server ${catkin_LIBRARIES} )
# 编译 shoot_action_server
add_executable(shoot_action_server src/shoot_action_server.cpp)
add_dependencies(shoot_action_server ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS} ros_behaviortree_demo_gencpp)
target_link_libraries(shoot_action_server ${catkin_LIBRARIES} )
3.2 行为树的实现
3.2.1 行为树的逻辑构建
在include/ros_behaviortree_demo 文件夹创建tree_xml.h,这里面放行为树的xml文件
// 本行为树的逻辑:整个树是一个序列节点,依次运行以下行为
// 1. 一个简单的printf行为
// 2. 给do_what 服务发送请求,并等待结果
// 3. 给 shoot action 发送请求,并等待结果
#ifndef SRC_TREE_XML_H
#define SRC_TREE_XML_H
static const char* xml_text = R"(
)";
#endif //SRC_TREE_XML_H
3.2.2 行为树各个节点的实现 tree_node.h 、tree_node.cpp
在 src 文件夹创建 tree_node.cpp,在include/ros_behaviortree_demo 文件夹创建tree_node.h。
这两个文件的作用是实现决策树里面叶节点的具体工作。
从上面的决策树逻辑可以看到一共有三个叶节点,分别做出了三种行为,分别是 SaySomething doWhat, shoot。对应的具体行为是SayHelloWorld, doWhat,shoot_5_bullets。
因此,要知道怎么实现具体行为,就必须先在tree_node.cpp和tree_node.h文件里面定义该种行为的实现方法。
tree_node.h : 代码链接
tree_node.cpp :代码链接
3.2.3 注册行为树的各个叶节点,并运行行为树 run_bh_tree.cpp
在src 文件夹创建 run_bh_tree.cpp
#include 3.2.4 在CmakeLists.txt 添加 run_bh_tree.cpp 的编译规则
# 创建行为树
add_executable(run_bh_tree src/run_bh_tree.cpp src/tree_node.cpp)
add_dependencies(run_bh_tree ${catkin_EXPORTED_TARGETS} ros_behaviortree_demo_gencpp)
target_link_libraries(run_bh_tree ${catkin_LIBRARIES})
3.3 编译整个工程
catkin build ros_behaviortree_demo
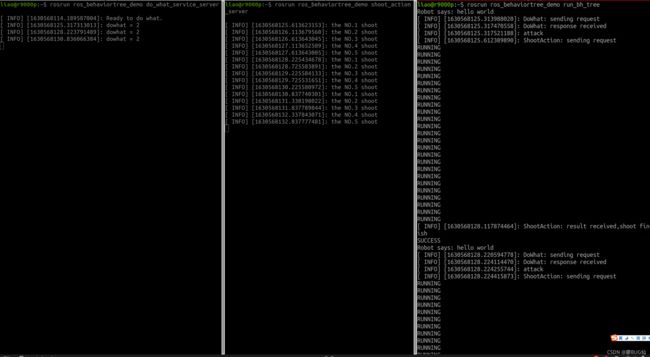
4、 测试行为树
打开三个命令行,分别执行
启动 do_what 服务端
rosrun ros_behaviortree_demo do_what_service_server
启动 shoot 服务端
rosrun ros_behaviortree_demo shoot_action_server
启动 行为树
rosrun ros_behaviortree_demo run_bh_tree
如果没有意外,将是下面的显示