视觉SLAM十四讲笔记三(第四讲)
1、引言
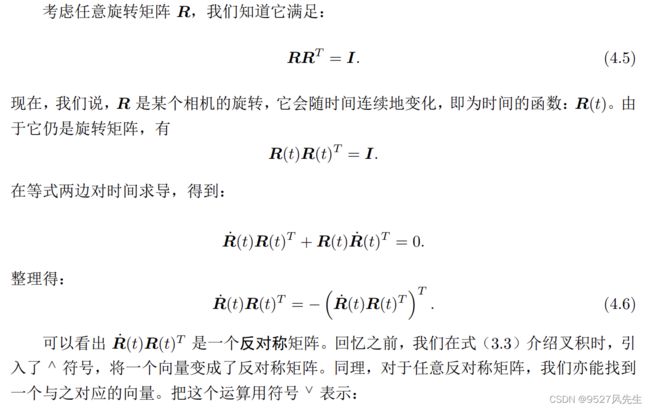
在第三讲中介绍了旋转矩阵R、旋转向量、欧拉角、四元数若干种方式,这些仅是对旋转的表示,除了表示我们还需进行估计和优化,因为在SLAM中位姿是未知的,我们需要解决:什么样的相机位姿最符合当前的观测数据,这类问题可以转化为优化问题,即求解最优的R、t 使误差最小化。
但是因为旋转矩阵是有约束的,所以优化变为有有约束优化,这是不好的,由此便引入李代数将其变为无约束优化。
2、李代数与李代数基础
特殊正交群: ![]()
特殊欧式群:![]()
上节介绍了旋转矩阵构成了特殊正交群,变换矩阵构成了特殊欧氏群,如果大家不熟悉,可以回顾我写的==>第三讲<==
旋转矩阵和变换矩阵的缺点:对加法是不封闭的(任意两个旋转矩阵相加不再是一个旋转矩阵)
群的概念:只有一个良好运算的集合(旋转矩阵对加法不封闭,但对乘法封闭(良好运算),=>只有一个良好运算)实在不懂的可以学习下矩阵论。
李群:具有连续(光滑)性质的群。
而刚体能够在空间中连续的进行运动,因此![]() ,都是李群。由此便引入了李群的概念。
,都是李群。由此便引入了李群的概念。
3、李代数的引出

式4.10里面的ϕ 正是对应到 SO(3) 上的 李代数 so(3)
每一个李群都有与之对应的李代数,且李代数描述了李群的局部性质。
李括号:群中较为简单的二元运算
李代数SO(3)
上文已经推导出李代数SO(3),下面给出具体的定义

下面我们说,之前提到的 ϕ,事实上是一种李代数。SO(3) 对应的李代数是定义在 R3 上的向量,我们记作 ϕ。根据前面的推导,每个 ϕ 都可以生成一个反对称矩阵:

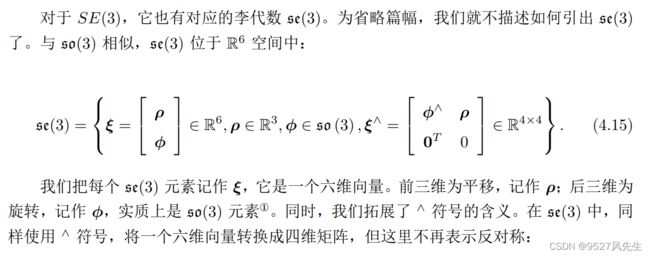
李代数SE(3)

4、指数与对数映射
在此我直接给出SO(3)与SE(3)的指数映射,具体推导过程不再给出。(知道这个概念就好)
SO(3)的指数映射:

SE(3)的指数映射:
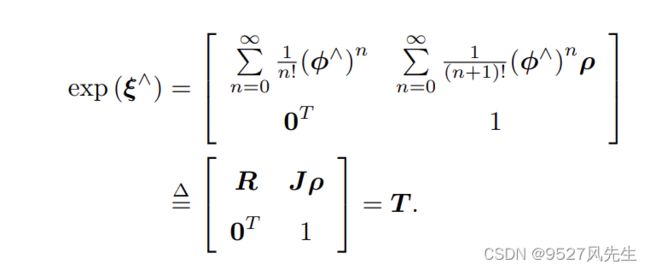
我们看到,平移部分经过指数映射之后, 发生了一次以 J 为系数矩阵的线性变换。请读者重视这里的 J,因为我们后面还要用到它。
最后总结下李群与李代数的关系图

5、 李代数求导与扰动模型
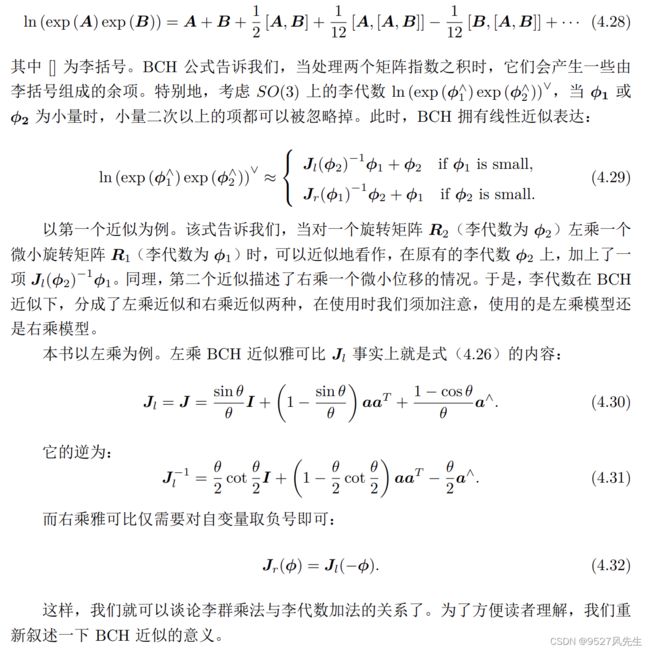
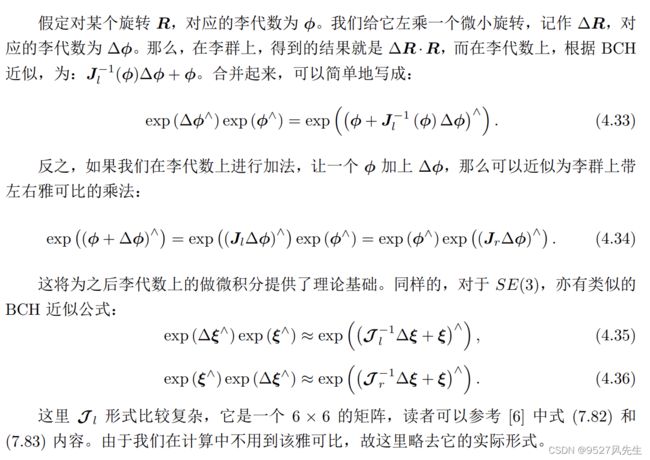
使用李代数是为了优化,有了李代数就可以进行无约束优化,而李代数无法进行乘法,因此引入BHC近似(一个新概念)。
两个李代数指数映射乘积的完整形式,由 Baker-Campbell-Hausdorff 公式(BCH 公 式)①给出。由于它完整的形式较复杂,我们给出它展开式的前几项:
李代数求导


第一种求导后仍然具有较复杂的参数,由此只介绍第二种求导方式
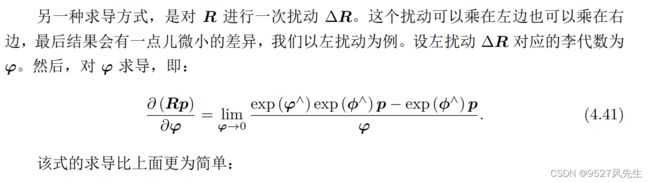
扰动模型求导
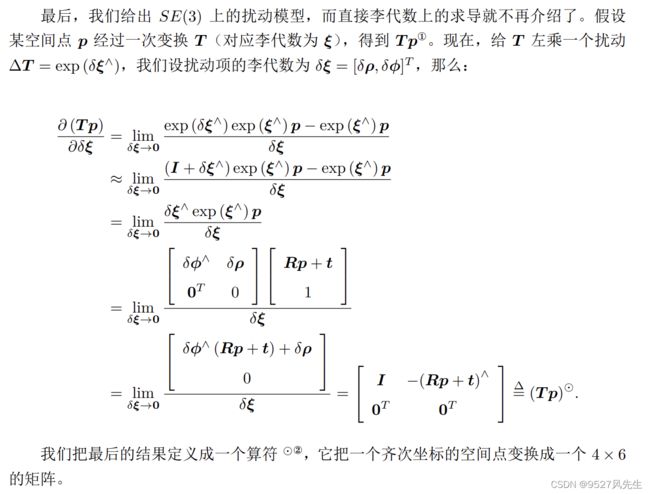
 6、SE(3)李代数求导
6、SE(3)李代数求导
7、矩阵求导顺序
8、Sophus模板安装:
1、下载fmt===>fmt
2、编译fmt
cd fmt-8.1.1
mkdir build
cd build
cmake ..
make
sudo make install
3、Sophus模板安装
git clone https://github.com/strasdat/Sophus.git
cd Sophus
mkdir build
cd build
cmake ..
make
sudo make install