- 【一起学Rust | 设计模式】习惯语法——使用借用类型作为参数、格式化拼接字符串、构造函数
广龙宇
一起学Rust#Rust设计模式rust设计模式开发语言
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档文章目录前言一、使用借用类型作为参数二、格式化拼接字符串三、使用构造函数总结前言Rust不是传统的面向对象编程语言,它的所有特性,使其独一无二。因此,学习特定于Rust的设计模式是必要的。本系列文章为作者学习《Rust设计模式》的学习笔记以及自己的见解。因此,本系列文章的结构也与此书的结构相同(后续可能会调成结构),基本上分为三个部分
- 《 C++ 修炼全景指南:九 》打破编程瓶颈!掌握二叉搜索树的高效实现与技巧
Lenyiin
C++修炼全景指南技术指南c++算法stl
摘要本文详细探讨了二叉搜索树(BinarySearchTree,BST)的核心概念和技术细节,包括插入、查找、删除、遍历等基本操作,并结合实际代码演示了如何实现这些功能。文章深入分析了二叉搜索树的性能优势及其时间复杂度,同时介绍了前驱、后继的查找方法等高级功能。通过自定义实现的二叉搜索树类,读者能够掌握其实际应用,此外,文章还建议进一步扩展为平衡树(如AVL树、红黑树)以优化极端情况下的性能退化。
- 《 C++ 修炼全景指南:十 》自平衡的艺术:深入了解 AVL 树的核心原理与实现
Lenyiin
C++修炼全景指南技术指南c++数据结构stl
摘要本文深入探讨了AVL树(自平衡二叉搜索树)的概念、特点以及实现细节。我们首先介绍了AVL树的基本原理,并详细分析了其四种旋转操作,包括左旋、右旋、左右双旋和右左双旋,阐述了它们在保持树平衡中的重要作用。接着,本文从头到尾详细描述了AVL树的插入、删除和查找操作,配合完整的代码实现和详尽的注释,使读者能够全面理解这些操作的执行过程。此外,我们还提供了AVL树的遍历方法,包括中序、前序和后序遍历,
- 《 C++ 修炼全景指南:四 》揭秘 C++ List 容器背后的实现原理,带你构建自己的双向链表
Lenyiin
技术指南C++修炼全景指南c++list链表stl
本篇博客,我们将详细讲解如何从头实现一个功能齐全且强大的C++List容器,并深入到各个细节。这篇博客将包括每一步的代码实现、解释以及扩展功能的探讨,目标是让初学者也能轻松理解。一、简介1.1、背景介绍在C++中,std::list是一个基于双向链表的容器,允许高效的插入和删除操作,适用于频繁插入和删除操作的场景。与动态数组不同,list允许常数时间内的插入和删除操作,支持双向遍历。这篇文章将详细
- pyhon+ffmpeg 常用音视频处理命令
不再游移
ffmpeg音视频python
FFmpeg是多媒体领域的万能工具。只要涉及音视频领域的处理,基本上没有它做不了的事情!通俗点讲,从视频录制、视频编辑再到播放,它都能做!前段时间做了个短视频自动化脚本项目,需要自动处理音视频(包括一些合成、拼接、转场、调色等等),当时做的时候找各种命令还是很痛苦的,因此对用到的所有处理命令做了个汇总,方便以后使用。目录一、获取音频时长二、获取视频信息三、获取视频时长四、多个视频合并五、视频提取视
- leetcode021-合并两个有序链表
陆阳226
问题描述将两个升序链表合并为一个新的升序链表并返回。新链表是通过拼接给定的两个链表的所有节点组成的。示例:输入:1->2->4,1->3->4输出:1->1->2->3->4->4解答递归法:每一层减去一个较小的节点,直到某个链表为null递归结束。publicstaticListNodesolution(ListNodel1,ListNodel2){if(l1==null){returnl2;}
- 数字化供应链架构、全景管理、全流程贯通整体解决方案:供应链管理就是利用管理工具、IT技术将企业引入外部资源的过程精细化、标准化管理,实现高效益低成本运营。
数字化建设方案
数字化转型数据治理主数据数据仓库智能制造数字工厂制造业数字化转型工业互联网供应链数字仓储智慧物流智慧仓储物流园区架构大数据
数字化供应链架构、全景管理、全流程贯通方案数字化供应链架构、全景管理、全流程贯通方案项目背景与目标供应链管理现状及挑战数字化供应链架构概念及优势全景管理与全流程贯通目标预期成果与效益智能管理机制建设需求预测与智能分析应用合同管理智能化提升举措仓储管理自动化和机器人技术应用物流配送优化策略周边系统整合与数据贯通现有系统梳理及评估报告数据接口标准制定和实施计划流程对接和数据交互机制设计监控和报警机制完
- 【数字化供应链】数字化供应链架构、全景管理、全流程贯通方案
数字化建设方案
数字化转型数据治理主数据数据仓库供应链数字仓储智慧物流智慧仓储物流园区架构微服务数据挖掘大数据人工智能
原文《数字化供应链架构、全景管理、全流程贯通方案》PPT格式。主要从供应链管理全景、智慧供应链建设总体目标、供应链总体业务流程、供应链总体功能架构、供应链总体技术架构、供应链全流程贯通、供应链全领域管理、供应链数据数据分析、供应链决策中台等进行建设。本文仅对主要内容进行介绍。来源网络公开渠道,旨在交流学习,如有侵权联系速删,更多参考公众号:优享智库基于先进IT技术、大数据能力、物联网应用、区块链平
- 数字化智能工厂数字化供应链架构、全景管理、全流程贯通方案
数字化建设方案
智能制造数字工厂制造业数字化转型工业互联网架构
随着信息技术的飞速发展,数字化转型已成为制造企业提升竞争力的关键途径。数字化智能工厂通过集成先进的物联网(IoT)、大数据、云计算、人工智能(AI)等技术,实现了生产过程的智能化、供应链管理的精准化及决策的科学化。本方案旨在构建一套完善的数字化供应链架构,实现全景管理、全流程贯通、智慧化升级,以数据为驱动,强化技术支撑与安全管理体系,推动企业向智能制造迈进。一、数字化供应链架构1.**集成化平台构
- 第十天:坐在家中浪中国
丹山人
别老刷抖音、快手了,手都刷成抖手了还刷。点开下面的连接看一下,大好河山尽在掌握。宅在家里一样可以信马由缰过草原、风驰电掣穿戈壁、翻山越岭登雪山、乘风破浪游海岛、佛心禅音拜寺庙、三六一度看古迹、走街串巷访民居,气定神闲逛都市。疫情不时成点状突发,考虑到有时大家可能宅得无聊了,国家将国内外500多个景点,做成全景3D模式,喜欢哪个点哪个,还有导游讲解,让你身临其境。体验足不出户的旅游方式。这就是中国!
- python语言基础(三)--公共方法、推导式和函数
电子海鸥
Python语法python开发语言
一、公共运算符与方法(一)公共运算符概述:这些运算符是可以作用到容器类型中的常见的运算符有:常用的如下:+合并(拼接),适用于:字符串,列表,元组.*复制,适用于:字符串,列表,元组.in是否包含,适用于:字符串,列表,元组,字典.notin是否不包含,适用于:字符串,列表,元组,字典.细节:in,notin针对于字典的时候,是只作用与键的.例如#+合并(拼接),适用于:字符串,列表,元组.pri
- leetcode 1071.字符串的最大公因子
是小Y啦
leetcode算法职场和发展
思路:模拟因为如果出现这么一个最长的字符串,那么肯定就存在于两个字符串之中,并且是这两个字符串的子集。所以我们就直接在这两个字符串中枚举即可。但是,可能在枚举的时候会有个问题,就是我们如果是从中间截取一小段,然后取匹配,是不是还需要考虑这种情况啊?没必要,因为题目中说是这两个字符串都能由这个子集字符串拼接而成,如果我们从其中一个字符串的中间截取一段,拼接后的字符串不仅匹配不上原字符串,而且也匹配不
- Python中的os.path.join()
小小小花儿
Python中的os.path.join()用于拼接路径名组件。路径组件之间会自动添加‘\’,也可以自己在组件的末尾加上‘\’。1、如果各路径组件名首字母均不包含‘\’,则函数会自动加上。importosa=os.path.join('save','test','1.jpg')print(a)输出:save\test\1.jpg注意:在windows系统中默认添加的是‘\’;在linux系统中,是
- 二十四节气风俗手册之春夏篇,《后浪》里的这些布置,你了解多少
爱追剧的大南瓜家
每次看《后浪》里的节气片段,尤其关注其最后毛笔落款下的桌面,画面是分镜头走向全景,再走向特写。那时候就觉得,桌面的布置尤其特色,是当季特色,是风俗习惯,是剧组的用心。小编终于等到了官微出品的节气布置台面的细节图,先给个好评,这次是不完全的春夏的节气们!立春(2月3日-2月4日)“立”是开始的意思。春是温暖鸟语花香,春是长生耕耘播种,从立春到立夏,都被称为春天。粉红色茶巾+豆青色茶具桌面放着迎春花,
- Python计算机视觉编程 第三章 图像到图像的映射
一只小小程序猿
计算机视觉pythonopencv
目录单应性变换直接线性变换算法仿射变换图像扭曲图像中的图像分段仿射扭曲创建全景图RANSAC拼接图像单应性变换单应性变换是将一个平面内的点映射到另一个平面内的二维投影变换。在这里,平面是指图像或者三维中的平面表面。单应性变换具有很强的实用性,比如图像配准、图像纠正和纹理扭曲,以及创建全景图像。单应性变换本质上是一种二维到二维的映射,可以将一个平面内的点映射到另一个平面上的对应点。代码如下:impo
- VR Outdoor Cinema VR户外电影院环境模场景型
逑乐
Unity各类资源展示资源vrUnity资源U3D模型环境
VR户外影院-类似于OculusCinema、Netflix、照片查看器、GearVR的VR菜单的VR视频播放器环境。即使在低端手机上也能使用-8K分辨率的6幅HQ立体全景图像-用于显示照片/视频的电视平面-GearVR的6个场景和主菜单下载:Unity资源商店链接资源下载链接效果图:
- Swift基本语法-简例
☆MOON
移动互联网-iOS笔记python正则表达式爬虫
Swift基本语法简例安全类型?与!区别变量与常量字符串拼接多行字符串数组操作字典操作数组遍历控制条件判断switch语句循环遍历函数闭包对象枚举结构体协议扩展泛型get,set属性属性观察懒加载,重写方法回调及保护安全类型?与!区别?表示:返回值是一个可选类型,需要解包处理,如果有值就是相应类型的,如果没有值,就是“nil”,适用于不确定值的情形!表示:不需要解包处理(第一次赋值时编译器已自动解
- golang学习笔记02——gin框架及基本原理
GoppViper
golang学习笔记golang学习笔记ginhttp
目录1.前言2.必要的知识3.路由注册流程3.1核心数据结构3.2执行流程3.3创建并初始化gin.Engine3.4注册middleware3.5注册路由及处理函数(1)拼接完整的路径参数(2)组合处理函数链(3)注册完成路径及处理函数链到路由树3.6服务端口监听4.请求处理5.请求绑定和响应渲染5.1.请求绑定5.2响应渲染结束语1.前言gin框架是golang中比较常见的web框架,截止到目
- JavaSE:3、运算符
_Power_Y
JavaSEjava开发语言
1、赋值运算符从右往左运算,左边是可赋值的目标,返回计算结果publicclassMain{publicstaticvoidmain(String[]argv){inta=10;intb=a=100;System.out.println(a);//输出100System.out.println(b);//输出100}}2、算术运算符+-*/%(1)加法支持字符串拼接,变量常量相加,隐式类型转换。类
- 将json型字符串转换为List<Map>的格式处理
ZJJG4
前后端交互
将json型字符串转换为List>的格式处理1、前台拼接字符串//保存事件$("#btn_save").on("click",(function(e){varpcbh=$("#sel_pcbh").val();varsqargs={list:[]};$("#clgltabletr:not(':first,:last')").each(function(i){varsqjson={};sqjson.
- HTML/CSS/JavaScript 全景指南:构建现代Web应用的基石
一杯梅子酱
技术栈学习前端htmlcss
引言:在Web开发中,HTML、CSS和JavaScript是三个不可或缺的技术,它们共同构成了前端开发的核心。本文旨在全面解析这三个技术的关键知识点,探讨它们之间的联系,并通过实际案例加深理解,最后分享一些宝贵的经验总结。一、HTML:内容的骨架1.基本结构标签的使用:,,文本内容:,至链接与图像:,列表:,,表格:,,,表单:,,,,2.语义化标签,,,,,3.案例创建一个简单的网页:Html
- 【深入剖析】Kylin架构全景及其组件详解
2401_85763639
kylin架构大数据
标题:【深入剖析】Kylin架构全景及其组件详解ApacheKylin是一个开源的分布式分析引擎,提供大数据集上的即时分析能力。它通过预计算技术,将数据以多维立方体的形式存储,从而加快查询速度。本文将详细探讨Kylin的架构及其组件,包括数据源、元数据存储、Cube构建、协调节点、查询引擎等关键部分。1.Kylin架构概述Kylin的架构设计为分层结构,每一层负责不同的功能和任务。2.数据源层Ky
- MyBatis 学习笔记(4) 动态SQL
张云飞Vir
1.背景本节讲mybatis应对动态SQL的场景。2.知识动态SQL是指“条件"不固定的SQL,对比于一般的SQL,动态SQL会有一个或者多个条件/参数。比如:场景:查询的时候,如果用户输入了姓名,就按姓名模糊查询;同时又输入了邮箱,就再增加一个条件按姓名+邮箱两个条件查询。传统的拼接SQL很费力,拼接时要确保不能忘记添加必要的空格,还要注意去掉列表最后一个列名的逗号。借助功能强大的基于OGNL的
- log4jdbc使用介绍
leechiwi
log4jdbc
0前言使用java进行数据库操作时最痛苦的莫过于拼接SQL语句。在实际运行时往往需要查看实际生成的SQL语句和实际传入的参数,或许还会有查看SQL执行时间等的需求。无论原生JDBC、dbutils、mybatis还是hibernate,使用log4j等日志框架可以看到生成的SQL,但是占位符和参数总是分开打印的。实在是不太友好。显示如下的效果:select*fromt_userwhereage>?
- Python DataFrame批量添加新列
愤怒的汽水
python基础知识机器学习
在处理数据的时候我想批量增加新的列,但是一般的情况下dataframe只能新增一个列(我查询了很多博客都是这么写的,我也没有找到好方法,本人愚钝,用创建新df和拼接的方法进行批量操作)本人错误的地方我会写在最后面,有时间的话可以看看共勉。df1=pd.DataFrame()#创建新DFdf1=df1.append([[1,2,3]])print
- 画僧巨然的《万壑松风图》
离离风翼
《万壑松风图》是五代画僧巨然的经典名作之一,现藏于上海博物馆。万壑松风图这是一幅全景式构图的山水画。画中层峦叠嶂、山势雄浑,有北方山水的豪迈;而山势曲折,树木葱郁,又可以感受到南方山水的秀润。巨然和尚早年生活在南京开元寺,师承南派山水画之祖董源,学习他“平淡天真”的画法;后来又随后主李煜来到河北开封,接触到了北派山水画。这幅画融合了南北山水画的特色,显得独具一格。那么,这幅画都有哪些特色呢?全画可
- 计算机视觉——第三章 图像拼接
JMU15980999055
python计算机视觉人工智能
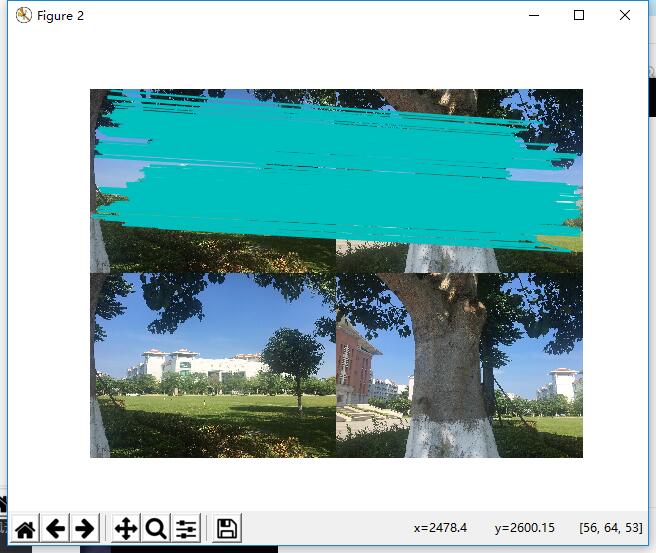
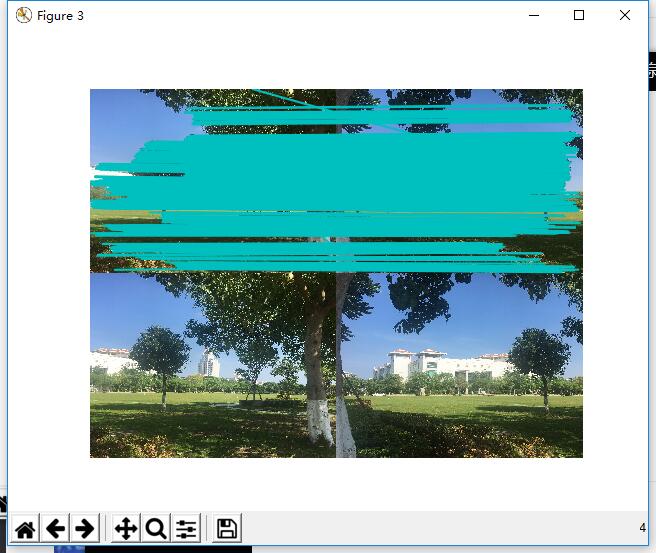
计算机视觉——第三章图像拼接1.图像全景拼接的原理和过程的简要介绍1.1特征点提取和匹配1.2图像配准1.3图像拼接2.实现多图像拼接2.1图片集说明2.2实验代码2.3实验结果及其分析3.两张不同角度的图像拼接3.1图片集说明3.2实验代码3.3实验结果及其分析总结1.图像全景拼接的原理和过程的简要介绍在同一位置拍摄的两幅或者多幅图片是单应性相关的,我们经常使用该约束将很多图像缝补起来,拼成一个
- 【python】列表(List)与元组(Tuple)
写代码也摆烂
#python基础知识点python开发语言
在python中,列表和元组都是非常常用的数据结构,用来存储一组有序的数据,并且可以为不同的数据类型。目录前言正文一、列表(List)1、定义:在[]内,用逗号隔开的多个数据2、索引取值3、切片4、求长度len()5、成员运算符in和notin6、列表的拼接+*7、列表添加元素7.1、末尾添加列表名.append(元素)7.2分散添加列表名.extend(可迭代对象)7.3插入列表名.insert
- Vue项目:将资源路径使用相对路径后,部分图片无法显示
engineer_why
vue项目问题集vue.js前端javascript
Vue项目:将资源路径使用相对路径后,部分图片无法显示绝对路径通过上一篇文档,使用publicPath实现绝对路径转相对路径,这一篇,来说说我之后碰到的问题.在资源路径改变为相对路径后,我发现代码中比如css引入的图片,它还是处于绝对地址,并且没有办法显示出来,提示为404找不到图片。解决办法:通过less或scss,定义一个变量baseUrl,然后通过字符串拼接的方式,在url路径中拼接到原本图
- 蓝桥杯2. 确定字符串是否是另一个的排列
DANGAOGAO
蓝桥杯python蓝桥杯python
题目描述实现一个算法来识别一个字符串str2str2是否是另一个字符串str1str1的排列。排列的解释如下:如果将str1str1的字符拆分开,重新排列后再拼接起来,能够得到str2str2,那么就说字符串str2str2是字符串str1str1的排列。(不忽略大小写)如果str2str2字符串是str1str1字符串的排列,则输出YES;如果str2str2字符串不是str1str1字符串的排
- html
周华华
html
js
1,数组的排列
var arr=[1,4,234,43,52,];
for(var x=0;x<arr.length;x++){
for(var y=x-1;y<arr.length;y++){
if(arr[x]<arr[y]){
&
- 【Struts2 四】Struts2拦截器
bit1129
struts2拦截器
Struts2框架是基于拦截器实现的,可以对某个Action进行拦截,然后某些逻辑处理,拦截器相当于AOP里面的环绕通知,即在Action方法的执行之前和之后根据需要添加相应的逻辑。事实上,即使struts.xml没有任何关于拦截器的配置,Struts2也会为我们添加一组默认的拦截器,最常见的是,请求参数自动绑定到Action对应的字段上。
Struts2中自定义拦截器的步骤是:
- make:cc 命令未找到解决方法
daizj
linux命令未知make cc
安装rz sz程序时,报下面错误:
[root@slave2 src]# make posix
cc -O -DPOSIX -DMD=2 rz.c -o rz
make: cc:命令未找到
make: *** [posix] 错误 127
系统:centos 6.6
环境:虚拟机
错误原因:系统未安装gcc,这个是由于在安
- Oracle之Job应用
周凡杨
oracle job
最近写服务,服务上线后,需要写一个定时执行的SQL脚本,清理并更新数据库表里的数据,应用到了Oracle 的 Job的相关知识。在此总结一下。
一:查看相关job信息
1、相关视图
dba_jobs
all_jobs
user_jobs
dba_jobs_running 包含正在运行
- 多线程机制
朱辉辉33
多线程
转至http://blog.csdn.net/lj70024/archive/2010/04/06/5455790.aspx
程序、进程和线程:
程序是一段静态的代码,它是应用程序执行的蓝本。进程是程序的一次动态执行过程,它对应了从代码加载、执行至执行完毕的一个完整过程,这个过程也是进程本身从产生、发展至消亡的过程。线程是比进程更小的单位,一个进程执行过程中可以产生多个线程,每个线程有自身的
- web报表工具FineReport使用中遇到的常见报错及解决办法(一)
老A不折腾
web报表finereportjava报表报表工具
FineReport使用中遇到的常见报错及解决办法(一)
这里写点抛砖引玉,希望大家能把自己整理的问题及解决方法晾出来,Mark一下,利人利己。
出现问题先搜一下文档上有没有,再看看度娘有没有,再看看论坛有没有。有报错要看日志。下面简单罗列下常见的问题,大多文档上都有提到的。
1、address pool is full:
含义:地址池满,连接数超过并发数上
- mysql rpm安装后没有my.cnf
林鹤霄
没有my.cnf
Linux下用rpm包安装的MySQL是不会安装/etc/my.cnf文件的,
至于为什么没有这个文件而MySQL却也能正常启动和作用,在这儿有两个说法,
第一种说法,my.cnf只是MySQL启动时的一个参数文件,可以没有它,这时MySQL会用内置的默认参数启动,
第二种说法,MySQL在启动时自动使用/usr/share/mysql目录下的my-medium.cnf文件,这种说法仅限于r
- Kindle Fire HDX root并安装谷歌服务框架之后仍无法登陆谷歌账号的问题
aigo
root
原文:http://kindlefireforkid.com/how-to-setup-a-google-account-on-amazon-fire-tablet/
Step 4: Run ADB command from your PC
On the PC, you need install Amazon Fire ADB driver and instal
- javascript 中var提升的典型实例
alxw4616
JavaScript
// 刚刚在书上看到的一个小问题,很有意思.大家一起思考下吧
myname = 'global';
var fn = function () {
console.log(myname); // undefined
var myname = 'local';
console.log(myname); // local
};
fn()
// 上述代码实际上等同于以下代码
m
- 定时器和获取时间的使用
百合不是茶
时间的转换定时器
定时器:定时创建任务在游戏设计的时候用的比较多
Timer();定时器
TImerTask();Timer的子类 由 Timer 安排为一次执行或重复执行的任务。
定时器类Timer在java.util包中。使用时,先实例化,然后使用实例的schedule(TimerTask task, long delay)方法,设定
- JDK1.5 Queue
bijian1013
javathreadjava多线程Queue
JDK1.5 Queue
LinkedList:
LinkedList不是同步的。如果多个线程同时访问列表,而其中至少一个线程从结构上修改了该列表,则它必须 保持外部同步。(结构修改指添加或删除一个或多个元素的任何操作;仅设置元素的值不是结构修改。)这一般通过对自然封装该列表的对象进行同步操作来完成。如果不存在这样的对象,则应该使用 Collections.synchronizedList 方
- http认证原理和https
bijian1013
httphttps
一.基础介绍
在URL前加https://前缀表明是用SSL加密的。 你的电脑与服务器之间收发的信息传输将更加安全。
Web服务器启用SSL需要获得一个服务器证书并将该证书与要使用SSL的服务器绑定。
http和https使用的是完全不同的连接方式,用的端口也不一样,前者是80,后
- 【Java范型五】范型继承
bit1129
java
定义如下一个抽象的范型类,其中定义了两个范型参数,T1,T2
package com.tom.lang.generics;
public abstract class SuperGenerics<T1, T2> {
private T1 t1;
private T2 t2;
public abstract void doIt(T
- 【Nginx六】nginx.conf常用指令(Directive)
bit1129
Directive
1. worker_processes 8;
表示Nginx将启动8个工作者进程,通过ps -ef|grep nginx,会发现有8个Nginx Worker Process在运行
nobody 53879 118449 0 Apr22 ? 00:26:15 nginx: worker process
- lua 遍历Header头部
ronin47
lua header 遍历
local headers = ngx.req.get_headers()
ngx.say("headers begin", "<br/>")
ngx.say("Host : ", he
- java-32.通过交换a,b中的元素,使[序列a元素的和]与[序列b元素的和]之间的差最小(两数组的差最小)。
bylijinnan
java
import java.util.Arrays;
public class MinSumASumB {
/**
* Q32.有两个序列a,b,大小都为n,序列元素的值任意整数,无序.
*
* 要求:通过交换a,b中的元素,使[序列a元素的和]与[序列b元素的和]之间的差最小。
* 例如:
* int[] a = {100,99,98,1,2,3
- redis
开窍的石头
redis
在redis的redis.conf配置文件中找到# requirepass foobared
把它替换成requirepass 12356789 后边的12356789就是你的密码
打开redis客户端输入config get requirepass
返回
redis 127.0.0.1:6379> config get requirepass
1) "require
- [JAVA图像与图形]现有的GPU架构支持JAVA语言吗?
comsci
java语言
无论是opengl还是cuda,都是建立在C语言体系架构基础上的,在未来,图像图形处理业务快速发展,相关领域市场不断扩大的情况下,我们JAVA语言系统怎么从这么庞大,且还在不断扩大的市场上分到一块蛋糕,是值得每个JAVAER认真思考和行动的事情
- 安装ubuntu14.04登录后花屏了怎么办
cuiyadll
ubuntu
这个情况,一般属于显卡驱动问题。
可以先尝试安装显卡的官方闭源驱动。
按键盘三个键:CTRL + ALT + F1
进入终端,输入用户名和密码登录终端:
安装amd的显卡驱动
sudo
apt-get
install
fglrx
安装nvidia显卡驱动
sudo
ap
- SSL 与 数字证书 的基本概念和工作原理
darrenzhu
加密ssl证书密钥签名
SSL 与 数字证书 的基本概念和工作原理
http://www.linuxde.net/2012/03/8301.html
SSL握手协议的目的是或最终结果是让客户端和服务器拥有一个共同的密钥,握手协议本身是基于非对称加密机制的,之后就使用共同的密钥基于对称加密机制进行信息交换。
http://www.ibm.com/developerworks/cn/webspher
- Ubuntu设置ip的步骤
dcj3sjt126com
ubuntu
在单位的一台机器完全装了Ubuntu Server,但回家只能在XP上VM一个,装的时候网卡是DHCP的,用ifconfig查了一下ip是192.168.92.128,可以ping通。
转载不是错:
Ubuntu命令行修改网络配置方法
/etc/network/interfaces打开后里面可设置DHCP或手动设置静态ip。前面auto eth0,让网卡开机自动挂载.
1. 以D
- php包管理工具推荐
dcj3sjt126com
PHPComposer
http://www.phpcomposer.com/
Composer是 PHP 用来管理依赖(dependency)关系的工具。你可以在自己的项目中声明所依赖的外部工具库(libraries),Composer 会帮你安装这些依赖的库文件。
中文文档
入门指南
下载
安装包列表
Composer 中国镜像
- Gson使用四(TypeAdapter)
eksliang
jsongsonGson自定义转换器gsonTypeAdapter
转载请出自出处:http://eksliang.iteye.com/blog/2175595 一.概述
Gson的TypeAapter可以理解成自定义序列化和返序列化 二、应用场景举例
例如我们通常去注册时(那些外国网站),会让我们输入firstName,lastName,但是转到我们都
- JQM控件之Navbar和Tabs
gundumw100
htmlxmlcss
在JQM中使用导航栏Navbar是简单的。
只需要将data-role="navbar"赋给div即可:
<div data-role="navbar">
<ul>
<li><a href="#" class="ui-btn-active&qu
- 利用归并排序算法对大文件进行排序
iwindyforest
java归并排序大文件分治法Merge sort
归并排序算法介绍,请参照Wikipeida
zh.wikipedia.org/wiki/%E5%BD%92%E5%B9%B6%E6%8E%92%E5%BA%8F
基本思想:
大文件分割成行数相等的两个子文件,递归(归并排序)两个子文件,直到递归到分割成的子文件低于限制行数
低于限制行数的子文件直接排序
两个排序好的子文件归并到父文件
直到最后所有排序好的父文件归并到输入
- iOS UIWebView URL拦截
啸笑天
UIWebView
本文译者:candeladiao,原文:URL filtering for UIWebView on the iPhone说明:译者在做app开发时,因为页面的javascript文件比较大导致加载速度很慢,所以想把javascript文件打包在app里,当UIWebView需要加载该脚本时就从app本地读取,但UIWebView并不支持加载本地资源。最后从下文中找到了解决方法,第一次翻译,难免有
- 索引的碎片整理SQL语句
macroli
sql
SET NOCOUNT ON
DECLARE @tablename VARCHAR (128)
DECLARE @execstr VARCHAR (255)
DECLARE @objectid INT
DECLARE @indexid INT
DECLARE @frag DECIMAL
DECLARE @maxfrag DECIMAL
--设置最大允许的碎片数量,超过则对索引进行碎片
- Angularjs同步操作http请求with $promise
qiaolevip
每天进步一点点学习永无止境AngularJS纵观千象
// Define a factory
app.factory('profilePromise', ['$q', 'AccountService', function($q, AccountService) {
var deferred = $q.defer();
AccountService.getProfile().then(function(res) {
- hibernate联合查询问题
sxj19881213
sqlHibernateHQL联合查询
最近在用hibernate做项目,遇到了联合查询的问题,以及联合查询中的N+1问题。
针对无外键关联的联合查询,我做了HQL和SQL的实验,希望能帮助到大家。(我使用的版本是hibernate3.3.2)
1 几个常识:
(1)hql中的几种join查询,只有在外键关联、并且作了相应配置时才能使用。
(2)hql的默认查询策略,在进行联合查询时,会产
- struts2.xml
wuai
struts
<?xml version="1.0" encoding="UTF-8" ?>
<!DOCTYPE struts PUBLIC
"-//Apache Software Foundation//DTD Struts Configuration 2.3//EN"
"http://struts.apache