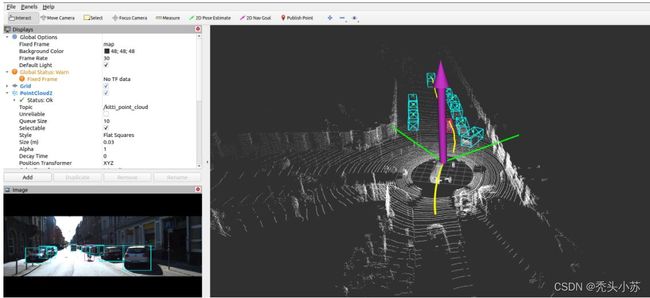
本次内容主要是上周内容的延续,主要画出kitti车的行驶的轨迹
同样的,我们先来看看最终实现的效果:
视频
接下来就进入一步步的编码环节。。。
1、利用IMU、GPS计算汽车移动距离和旋转角度
计算移动距离
- 通过GPS计算
#定义计算GPS距离方法
def computer_great_circle_distance(lat1,lon1,lat2,lon2):
delta_sigma = float(np.sin(lat1*np.pi/180)*np.sin(lat2*np.pi/180)+\
np.cos(lat1*np.pi/180)*np.cos(lat2*np.pi/180)*np.cos(lon1*np.pi/180-lon2*np.pi/180))
return 6371000.0*np.arccos(np.clip(delta_sigma,-1,1))
#使用GPS计算距离
gps_distance += [computer_great_circle_distance(imu_data.lat,imu_data.lon,prev_imu_data.lat,prev_imu_data.lon)]
- 通过IMU计算
IMU_COLUMN_NAMES = ['lat','lon','alt','roll','pitch','yaw','vn','ve','vf','vl','vu','ax','ay','az','af',
'al','au','wx','wy','wz','wf','wl','wu','posacc','velacc','navstat','numsats','posmode',
'velmode','orimode']
#获取IMU数据
imu_data = read_imu('/home/wsj/data/kitty/RawData/2011_09_26/2011_09_26_drive_0005_sync/oxts/data/%010d.txt'%frame)
#使用IMU计算距离
imu_distance += [0.1*np.linalg.norm(imu_data[['vf','vl']])]
- 比较两种方式计算出的距离(GPS/IMU)
import matplotlib.pyplot as plt plt.figure(figsize=(20,10)) plt.plot(gps_distance, label='gps_distance') plt.plot(imu_distance, label='imu_distance') plt.legend() plt.show()
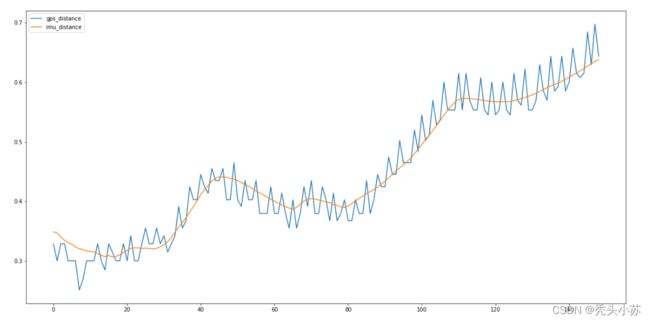
显然,IMU计算的距离较为平滑。
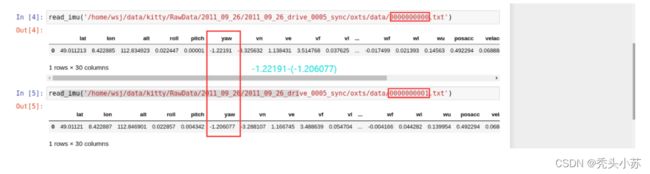
- 计算旋转角度 旋转角度的计算较为简单,我们只需要根据IMU获取到的yaw值就可以计算(前后两帧图像的yaw值相减)
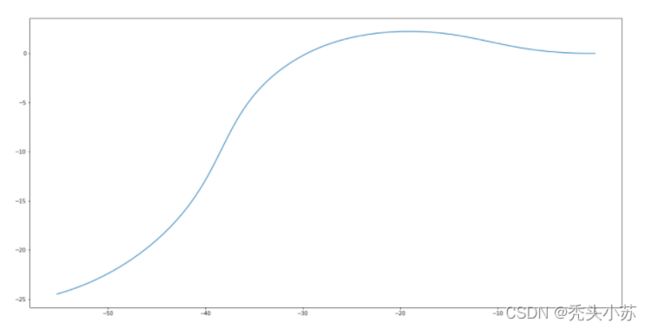
2、画出kitti车的行驶轨迹
prev_imu_data = None
locations = []
for frame in range(150):
imu_data = read_imu('/home/wsj/data/kitty/RawData/2011_09_26/2011_09_26_drive_0005_sync/oxts/data/%010d.txt'%frame)
if prev_imu_data is not None:
displacement = 0.1*np.linalg.norm(imu_data[['vf','vl']])
yaw_change = float(imu_data.yaw-prev_imu_data.yaw)
for i in range(len(locations)):
x0, y0 = locations[i]
x1 = x0 * np.cos(yaw_change) + y0 * np.sin(yaw_change) - displacement
y1 = -x0 * np.sin(yaw_change) + y0 * np.cos(yaw_change)
locations[i] = np.array([x1,y1])
locations += [np.array([0,0])]
prev_imu_data =imu_data
plt.figure(figsize=(20,10))
plt.plot(np.array(locations)[:, 0],np.array(locations)[:, 1])
3、画出所有车辆的轨迹
class Object():
def __init__(self, center):
self.locations = deque(maxlen=20)
self.locations.appendleft(center)
def update(self, center, displacement, yaw):
for i in range(len(self.locations)):
x0, y0 = self.locations[i]
x1 = x0 * np.cos(yaw_change) + y0 * np.sin(yaw_change) - displacement
y1 = -x0 * np.sin(yaw_change) + y0 * np.cos(yaw_change)
self.locations[i] = np.array([x1,y1])
if center is not None:
self.locations.appendleft(center)
def reset(self):
self.locations = deque(maxlen=20)
#创建发布者
loc_pub = rospy.Publisher('kitti_loc', MarkerArray, queue_size=10)
#获取距离和旋转角度
imu_data = read_imu('/home/wsj/data/kitty/RawData/2011_09_26/2011_09_26_drive_0005_sync/oxts/data/%010d.txt'%frame)
if prev_imu_data is None:
for track_id in centers:
tracker[track_id] = Object(centers[track_id])
else:
displacement = 0.1*np.linalg.norm(imu_data[['vf','vl']])
yaw_change = float(imu_data.yaw - prev_imu_data.yaw)
for track_id in centers: # for one frame id
if track_id in tracker:
tracker[track_id].update(centers[track_id], displacement, yaw_change)
else:
tracker[track_id] = Object(centers[track_id])
for track_id in tracker:# for whole ids tracked by prev frame,but current frame did not
if track_id not in centers: # dont know its center pos
tracker[track_id].update(None, displacement, yaw_change)
prev_imu_data = imu_data
def publish_loc(loc_pub, tracker, centers):
marker_array = MarkerArray()
for track_id in centers:
marker = Marker()
marker.header.frame_id = FRAME_ID
marker.header.stamp = rospy.Time.now()
marker.action = marker.ADD
marker.lifetime = rospy.Duration(LIFETIME)
marker.type = Marker.LINE_STRIP
marker.id = track_id
marker.color.r = 1.0
marker.color.g = 1.0
marker.color.b = 0.0
marker.color.a = 1.0
marker.scale.x = 0.2
marker.points = []
for p in tracker[track_id].locations:
marker.points.append(Point(p[0], p[1], 0))
marker_array.markers.append(marker)
loc_pub.publish(marker_array)
到此这篇关于Python中使用kitti数据集实现自动驾驶——绘制出所有物体的行驶轨迹的文章就介绍到这了,更多相关kitti数据集自动驾驶内容请搜索脚本之家以前的文章或继续浏览下面的相关文章希望大家以后多多支持脚本之家!