Semi-supervised Learning入门学习——Π-Model、Temporal Ensembling、Mean Teacher简介
知乎同名账号同步发布。
通过两篇论文简单入门学习半监督的思想。论文:
arxiv1610(ICLR17)Temporal Ensembling for Semi-Supervised Learning
arxiv1703(NIPS17)Mean teachers are better role models- Weight-averaged consistency targets improve semi-supervised deep learning results
简要介绍Π-Model、Temporal Ensembling、Mean Teacher。欢迎交流,喜欢的话请点赞关注,之后持续更新。
目录
- 一、Π-model简介
- 二、Temporal Ensembling简介
- 三、mean teachers
多个网络的集成通常比单个网络更强。
过去也通过dropout、dropconnect、stochastic depth等技术间接证明了这一点,以及在swapout network中,训练聚焦于一个特定的网络子集。这些技术使得网络的训练结果可被视为ensemble of trained sub-networks。
作者是将上述观点扩展到了将单个网络的不同epochs的输出(结合不同的正则化和对输入数据的增强)进行集成:
We extend this idea by forming ensemble predictions during training, using the outputs of a single network on different training epochs and under different regularization and input augmentation conditions.
训练仍旧在单个网络上进行,但由于dropout,不同epoch的预测结果对应于大量单个子网络的集成的预测。
总之可以将单个网络的不同epoch的预测结果集成起来,而这种集成预测(ensemble prediction)能够用于半监督。如果将集成预测结果和正在被训练的当前网络的输出相比较,那么集成预测的结果应该更接近于无标签数据对应的未知的标签。所以可以将集成预测的结果作为无标签的输入对应的label(可以将集成预测结果当做是一个伪标签)。
(但这里我有个疑问,因为大前提是认为多个网络的集成比单个网络更强大,虽然不同epoch的集成可以视为不同网络的集成,但是后来的epoch按理来说要比先前的epoch更优秀,所以把当前epoch和之前所有epoch做集成,我认为可能并不会更强大,因为之前所有的epoch都是更菜的epoch。所以我觉得这样做有用的原因可能不是因为这样集成会更强,而是这样集成会更菜,从而可以视为一种正则化)
作者的方法非常依赖于dropout正则化和丰富多样的input数据增强,如果两者都没有,那么用上述方法推断出的unlabeled data的label(伪标签)就没有太多的可信度。
作者提出的方法是self-ensembling,进一步作者发现,在全标签的情况下,这个方法也能够提升分类效果,并提供了对错误标签的容忍度。
两种方式来实现self-ensembling,Π-model和temporal ensembling。
作者用分类问题来阐述方法,N个input数据,M个有label,类别一共有C类。
一、Π-model简介

模型流程图如上图所示,看伪代码就足够理解它了:

x表示input,y表示label,z表示预测值。有两个z,表示对input做不同的数据增强、经过不同dropout网络生成的两个预测结果,一个z和label y做交叉熵损失,然后两个z之间做均方差损失。将两个损失加权求和(有标签数据两个损失项都用,无标签数据只用第二个损失项),网络参数用ADAM进行优化。
关于将 z i z_i zi和 z i ~ \tilde{z_i} zi~之间最小化(loss的第二项),paper中给了一些说法:
1,让两个z之间的dark knowledge尽可能接近,这是一个比要求只有最终分类保持不变强得多的要求。
2,因为dropout的存在,在训练过程中网络的输出是一个随机变量,对于相同input和相同网络而言,会产生不同的输出结果(即对于同一个x,产生的两个z不相同)。数据增强亦是如此,也会造成两个z之间的difference,这个difference可以视为是分类问题的错误(an error in classification),由于两个z对应的输入x是同一个,所以最小化两个z之间的difference就是一个合理的目标。
☆对于无标签的数据,学者提出了一个一致性约束假设:
对于无标签数据,对模型和数据加一定扰动,预测结果一致。
内容来源:https://blog.csdn.net/u011345885/article/details/111758193
上述的dropout就是对模型的扰动,数据增强就是对数据的扰动。
关于将两个z之间的差异最小化,还有两种思想:
1,一致性正则化:指的是根据上述一致性约束来构造loss;
2,伪标签:指的是将其中一个z视为伪标签,让另一个z逼近这个伪标签。
(如果是用思想2来看待π model的无监督loss term,即伪标签的思想,那么temporal ensembling就是改进了伪标签,后文会讲述)
关于权重 w w w,它的公式是 w ( t ) = e x p [ − 5 ( 1 − T ) 2 ] w(t)=exp[-5(1-T)^2] w(t)=exp[−5(1−T)2],在前80个epochs,T线性地由0变成1,从而w的值从较小的正数逐渐变为1.所以一开始,训练主要取决于loss中的有监督分量,即仅取决于标记数据。需要注意的是loss中的无监督分量要上升得足够慢,否则网络容易陷入到退化解中,无法获得有意义的分类。
(作者在给出w(t)公式的附录里也给出了其他训练细节:除了上述权重在前80个epochs的变化外,学习率和Adam β 1 \beta_1 β1都需要衰减,batchsize是100,网络一共训练300个epochs。)
二、Temporal Ensembling简介
如果将Π-model中的 z ~ i \tilde z_i z~i视为 z i z_i zi的伪标签的话,那么这个伪标签是不太好的,temporal ensembling就是针对这一点进行了改进,具体见paper中的图片:

注意上图的角标 i i i不是指时序,而是指一共 N N N个数据中的第 i i i个,生成的 z i z_i zi要参与生成下个epochs的第 i i i个数据的伪标签。
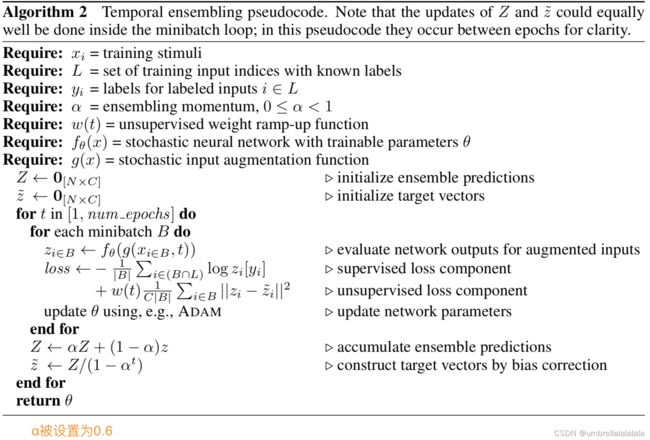
(注意是每个epoch,而不是每个batch,来改变一次伪标签,这种改变其实非常缓慢。之后的工作比如说mean teacher也指出,这个方法对于大数据集来说是非常难处理的)
注意上述伪代码, z ~ \tilde{z} z~表示 N N N个数据的伪标签,每个伪标签 z i ~ \tilde{z_i} zi~是一个 C C C维向量,作者的意思是在minibatch的循环就能够完成对 z ~ \tilde{z} z~的更新(每次循环更新一个 z i ~ \tilde{z_i} zi~),但是为了表述清晰,伪代码将更新写在了epoch的循环中。
和Π-model不同就在于end for语句后面的两行,作者将α设置为0.6,其中这两行的第二行作者称其为:对startup bias的纠正,作者说这个和Adam是类似的:
A similar bias correction has been used in, e.g., Adam (Kingma & Ba, 2014) and mean-only batch normalization (Salimans & Kingma, 2016).
实际上就是由于 Z Z Z是采用 α Z + ( 1 − α ) z \alpha Z + (1 - \alpha)z αZ+(1−α)z的公式计算,是历史值 Z Z Z和新的值 z z z累加(注意累加这个词,后面几句还会提及)所得。最开始的时候 Z Z Z为0,所以计算所得的 Z Z Z的值就是 ( 1 − α ) z (1 - \alpha)z (1−α)z,这个时候 t t t为1,则 Z / ( 1 − α t ) Z/(1 - \alpha^t) Z/(1−αt)就是 z z z本身,也就是将值放大到了本来该有的样子。随着 t t t的增大, ( 1 − α t ) (1 - \alpha^t) (1−αt)的值越来越接近1,则除以它的放大效果就会减弱。也就是这个分母是一开始起作用,解决的是累加在开始阶段导致值偏小(因为如刚才所说,累加是历史值 Z Z Z和新的值 z z z加权求和,在开始阶段,历史值 Z Z Z很小,甚至在 t t t为1的时候历史值为0),所以才说它解决的是startup bias,即开始阶段的偏差(偏小),用除以一个小于1的数将它放大。
由于采用的是类似于滑动平均的思想去构造伪标签,所以在第一个epochs需要单独设置一些参数,第一个epochs中的w(t)设置为0,表示loss中只有有监督分量。
temporal ensembling相对于Π-model的好处:
1,训练更快,因为一个epochs不再用计算两个output z;
2,训练结果比Π-model更不noisy(具体啥意思作者没说,应该就是结果更稳定吧)。
Second, the training targets z ~ \tilde z z~ can be expected to be less noisy than with Π-model.
参考资料
https://blog.csdn.net/u011345885/article/details/111758193
三、mean teachers
作者指出了temporal ensembling的缺点:每个epoch更新一次伪标签,如果面对的是很大的数据集,那么这种更新方式会变得很缓慢,这是很有问题的。为了克服这个问题,作者提出的方法是对模型的权重进行滑动平均,而非对伪标签的生成进行滑动平均。
To overcome this problem, we propose Mean Teacher, a method that averages model weights instead of label predictions.
作者解释了已有的模型:模型拥有双重的身份——学生和教师。作为学生,模型一如既往地进行学习;作为教师,模型生成一个target(即伪标签)。(注意mean teacher每个batch更新一次teacher model的参数,详见后文)
由于模型它自己生成target,这样可能会造成不正确的事情,所以提升target或者说伪标签的质量就是需要考虑的事情。作者认为有两种提升target的方式:
- 仔细选择对数据或者模型的扰动,而不只是施加加性或者乘性噪声。(补充paper中描述:对于两个相似的数据点,一个良好的模型应当给出相同的预测结果)
- 仔细选择一个teacher model,而不是直接将student model复制过来作为teacher model本身。
第一种方式已经被下述方法使用了:
Miyato, Takeru, Maeda, Shin-ichi, Koyama, Masanori, and Ishii, Shin. Virtual Adversarial Training: a Regularization Method for Supervised and Semi-supervised Learning. arXiv:1704.03976 [cs, stat], April 2017. arXiv: 1704.03976.
链接:https://ieeexplore.ieee.org/document/8417973
(TPAMI, 421 paper citations (20220507))
作者采用第二种方法,具体做法是,对于每个batch,用反向传播的方式更新student model的参数,然后用EMA的方式更新teacher model的参数:
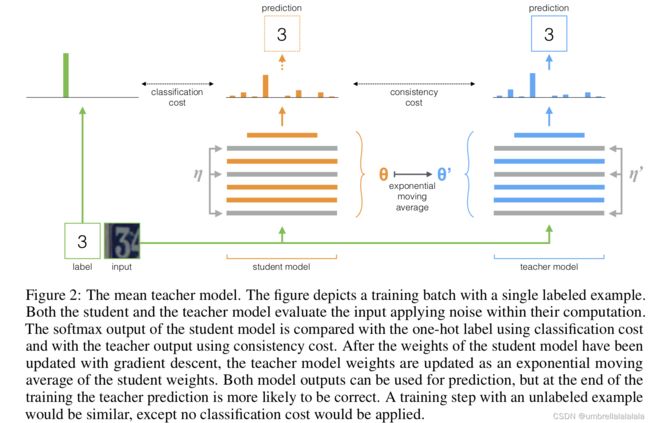
student model和teacher model都有分类的能力,但在训练结束后,teacher model可能有更好的正确率。
所谓EMA的方式,就是用student model的参数,按照下述公式来更新teacher model的参数(注意最开始是直接将student model的参数复制给teacher model):
![]()
在ramp-up阶段,α的值设定为0.99,之后的训练过程中设置为0.999( α \alpha α越大,student model的参数对teacher model的参数影响越小)。这是因为初始时 student 模型训练的很快,而 teacher 需要忘记之前的、不正确的 student 权重;在 student 提升很慢的时候, teacher 记忆越长越好。
此段内容参考:半监督学习:Π-Model、Temporal Ensembling、Mean Teacher
其实如果讲述个人想法,我觉得teacher model的存在会让student model的更新速度变慢(因为上图中的consistency cost),从而起到一个正则化的作用。但也可以用之前temporal ensembling那里的思想,认为多个模型的集成要强于单个模型(由于teacher model的模型参数是每个阶段的student model模型参数的滑动平均,所以可以视为不同阶段的student model的集成。而且 α \alpha α非常接近1,所以teacher model参数的更新速度非常的慢)。
但我个人觉得正则化的思想更能说服我,并且喊了其他大佬的博客中,出现了一个词叫“consistency regularization”即一致性正则,所以应该可以用正则化的观点来看待这几个方法:
Π-Model、Temporal Ensembling 和 Mean Teacher 三者都是利用一致性正则(consistency regularization)来进行半监督学习(semi-supervised learning)。
来源:https://blog.csdn.net/chanbo8205/article/details/108846097
再回归一下标题,自监督的简单应用的例子也在上图,就是数字识别问题,工作流程刻画的较为清晰,就不赘述了。
作者的实验和若干方法进行了对比,其中将Π-model复制过来当作baseline,然后将它修改成使用weight-averaged consistency的形式(即上图的consistency cost),记为Π (ours)。看一下作者做的实验和实验结果:

可以看出在label较少的时候,mean teacher要好很多,部分情况mean teacher不是最佳。值得注意的是原始Π-model在label不全的时候比Π (ours)好,这似乎无法说明在Π-model的情况下,令模型使用weight-averaged consistency会得到更好的效果。
先看到这里,其他实验部分就不赘述了。如有不通意见,欢迎评论区交流。