Opencv笔记
最近在刷opecnv的课,没什么时间进行整理,先粗略的把所学的记录下来,以后有空再进行整理。
一、加载显示图片、保存图片
import cv2
import numpy as np
import matplotlib.pyplot as plt
#加载
img = cv2.imread("111.jpg", cv2.IMREAD_GRAYSCALE) #转为灰度图, 0是彩图,-1是原图
cv2.imshow("map", img) #opencv是BGR, matplotlib是RGB
cv2.waitKey(0)
cv2.destroyAllWindows()
#保存图像
cv2.imwrite("copy-map.jpg", img)
二、加载摄像头、保存视频
(1)
#打开摄像头
cap = cv2.VideoCapture(0)
fourcc = cv2.VideoWriter_fourcc(*'XVID') #编码器
out = cv2.VideoWriter("output.avi", fourcc, 20.0,(640, 480))
while True:
ret, frame = cap.read()
cv2.imshow("frame", frame) #原色摄像头
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
out.write(frame)
cv2.imshow("gray", gray)
if cv2.waitKey(1)& 0xFF == ord("q"): #注意:cv2.waitkey()会有返回值,是32-bit int值1
break
#关闭摄像头进程
cap.release()
out.release()
cv2.destroyAllWindows()
(2)视频流pipeline(直接用)
def stackImages(scale,imgArray):
rows = len(imgArray)
cols = len(imgArray[0])
rowsAvailable = isinstance(imgArray[0], list)
width = imgArray[0][0].shape[1]
height = imgArray[0][0].shape[0]
if rowsAvailable:
for x in range ( 0, rows):
for y in range(0, cols):
if imgArray[x][y].shape[:2] == imgArray[0][0].shape [:2]:
imgArray[x][y] = cv2.resize(imgArray[x][y], (0, 0), None, scale, scale)
else:
imgArray[x][y] = cv2.resize(imgArray[x][y], (imgArray[0][0].shape[1], imgArray[0][0].shape[0]), None, scale, scale)
if len(imgArray[x][y].shape) == 2: imgArray[x][y]= cv2.cvtColor( imgArray[x][y], cv2.COLOR_GRAY2BGR)
imageBlank = np.zeros((height, width, 3), np.uint8)
hor = [imageBlank]*rows
hor_con = [imageBlank]*rows
for x in range(0, rows):
hor[x] = np.hstack(imgArray[x])
ver = np.vstack(hor)
else:
for x in range(0, rows):
if imgArray[x].shape[:2] == imgArray[0].shape[:2]:
imgArray[x] = cv2.resize(imgArray[x], (0, 0), None, scale, scale)
else:
imgArray[x] = cv2.resize(imgArray[x], (imgArray[0].shape[1], imgArray[0].shape[0]), None,scale, scale)
if len(imgArray[x].shape) == 2: imgArray[x] = cv2.cvtColor(imgArray[x], cv2.COLOR_GRAY2BGR)
hor= np.hstack(imgArray)
ver = hor
return ver
三、图像基本操作
(1)对图像局部区域像素改色
import cv2
import numpy as np
import matplotlib.pyplot as plt
"""-------ROI提取--------"""
img = cv2.imread("111.jpg", 1)
img2= img
img[:100, :200] = [255,0,0]
cv2.imshow("crop", img2)
cv2.waitKey(10)
(2)画矩形、圆形
"""----------画矩形-------"""
img = cv2.imread("111.jpg", 1)
cv2.rectangle(img,(100, 200), (400, 500), (0, 255, 0), thickness=3)
cv2.imshow("rectangle", img)
"""---------画圆----------"""
cv2.circle(img, (500, 500), 65, (255,0,0), 3) #不填充
cv2.circle(img, (800, 5800), 65, (255,0,0), thickness=-1) #不填充
cv2.imshow("circle", img)
cv2.waitKey(0)
cv2.destroyAllWindows()
\
四、图像算法运算
(1)图像加法cv2.add
(2)图像融合cv2.weight
(3)图像像素的逻辑按位操作

"""逻辑与操作,提取非矩形ROI"""
import cv2
import numpy as np
#读取两张图片
img1 = cv2.imread("mainlogo.png",1)
img2 = cv2.imread("3D-Matplotlib.png",1)
# cv2.imshow("img1",img1)
# cv2.waitKey(0)
# cv2.destroyAllWindows()
#提取感兴趣区域ROI
rows, cols,_ = img1.shape
roi = img2[:rows,:cols]
# cv2.imshow("ROI",roi)
# cv2.waitKey(0)
# cv2.destroyAllWindows()
#转为灰度图,提取前景图像,生成掩码
img1_gray = cv2.cvtColor(img1,cv2.COLOR_BGR2GRAY)
retval, mask = cv2.threshold(img1_gray,220,255,type=cv2.THRESH_BINARY_INV)
img1_fn = cv2.bitwise_and(img1,img1,mask=mask)
cv2.imshow("mask",mask)
cv2.imshow("img1_fn",img1_fn)
cv2.waitKey(0)
cv2.destroyAllWindows()
#提取背景图像ROI位置的掩码
mask_inv = cv2.bitwise_not(mask) #反转
img2_bg = cv2.bitwise_and(roi,roi,mask=mask_inv)
cv2.imshow("img2_bg",img2_bg)
cv2.waitKey(0)
cv2.destroyAllWindows()
dst = cv2.add(img1_fn,img2_bg)
img2[:rows,:cols] = dst
cv2.imshow("result",img2)
cv2.waitKey(0)
cv2.destroyAllWindows()
运行结果:

四、对灰度图二值化,阈值处理
功能:去噪声,去掉图标的白低
ret, thresh = cv2.threshold(src, thresh, maxval, type, dst=None)
五、平滑处理:均值滤波,高斯滤波,中值滤波,方波
import cv2
import numpy as np
img = cv2.imread("mainsvmimage.png")
# 均值滤波
img2 = cv2.blur(img, (3, 3))
#高斯滤波
img3 = cv2.GaussianBlur(img,(3,3), 1)
#中值滤波
img4 = cv2.medianBlur(img,3)
#方波
img5 = cv2.boxFilter(img, -1, (3,3), normalize=True)
cv2.imshow("blur:", img2)
cv2.imshow("GaussianBlur:",img3)
cv2.imshow("medianBlur:",img4)
cv2.imshow("bpxFilter:",img5)
res = np.hstack((img2, img3, img4, img5))
cv2.imshow("All:", res)
cv2.waitKey(0)
cv2.destroyAllWindows()
六、形态学处理(腐蚀操作)
kernel = getStructuringElement(shape = cv2.MORPH_RECT, ksize=(10, 3))
(1)腐蚀操作
(2)膨胀操作
(3)开运算
操作:先腐蚀,消除毛刺,再膨胀
dst = open(src,element) = dilate(erode(src,element))
效果:消除毛刺
import cv2
import numpy as np
kernel = np.ones((3,3),dtype=np.uint8)
img = cv2.imread("dige.png")
open = cv2.morphologyEx(img,cv2.MORPH_OPEN,kernel,1) #开运算
cv2.imshow("src",img)
cv2.imshow("open",open)
src_dst = np.hstack((img,open))
cv2.imshow("src_dst",src_dst)
cv2.waitKey(0)
cv2.destroyAllWindows()
运行结果:

(4)闭运算(先膨胀,再腐蚀)
操作:先膨胀,再腐蚀
dst = close(src,element) = dilate(erode(src,element))
效果:基本没什么效果
import cv2
import numpy as np
kernel = np.ones((3,3),dtype=np.uint8)
img = cv2.imread("dige.png")
open = cv2.morphologyEx(img,cv2.MORPH_CLOSE,kernel,1) #闭运算,先膨胀,再腐蚀
cv2.imshow("src",img)
cv2.imshow("open",open)
src_dst = np.hstack((img,open))
cv2.imshow("src_dst",src_dst)
cv2.waitKey(0)
cv2.imwrite("src_dst.jpg",src_dst)
cv2.destroyAllWindows()
运行结果:

(5)梯度运算(膨胀-腐蚀=轮廓)
操作:膨胀-腐蚀
dst = morph_grad(src,element) = dilate(src,element) − erode(src,element)
效果:获得图像的轮廓,类似于findContours()操作,里面黑,边缘白,不是轮廓的附近都会变成黑色(像素值为0)
import cv2
import numpy as np
kernel = np.ones((3,3),dtype=np.uint8)
img = cv2.imread("credit_card_01.png")
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
#形态学梯度运算
dil = cv2.dilate(gray,kernel,1)
ero = cv2.erode(gray,kernel,1)
dst = cv2.morphologyEx(gray, cv2.MORPH_GRADIENT, kernel, 1)
src_dst = np.hstack((gray, dst))
dil_ero = np.hstack((dil,ero))
cv2.imshow("dil_ero",dil_ero)
cv2.imshow("src_dst",src_dst)
cv2.waitKey(0)
cv2.destroyAllWindows()
运行结果:


(6)礼帽(TOPHAT):原始图像-开运算
操作:原始图像-开运算图像 (先腐蚀,再膨胀)
dst = tophat(src, element) = src − open(src, element)
效果:突出更明亮的区域(杂质),不是轮廓的附近都会变成黑色(像素值为0)
import cv2
import numpy as np
kernel = np.ones((3,3),dtype=np.uint8)
img = cv2.imread("credit_card_01.png")
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
#形态学礼貌操作
open = cv2.morphologyEx(gray,cv2.MORPH_OPEN,kernel,1)
tohat = cv2.morphologyEx(gray, cv2.MORPH_TOPHAT, kernel, 1)
src_dst = np.hstack((gray, tohat))
cv2.imshow("open",open)
cv2.imshow("src_dst",src_dst)
cv2.waitKey(0)
cv2.destroyAllWindows()
运行结果:


(7)黑帽(BLACKHAT):闭运算-原始图像
操作:闭运算-原始图像
dst = blackhat(src, element) = close(src, element) − src
效果:基本全黑,不知道有什么用
import cv2
import numpy as np
kernel = np.ones((3,3),dtype=np.uint8)
img = cv2.imread("credit_card_01.png")
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
#形态学黑帽操作
close = cv2.morphologyEx(gray,cv2.MORPH_CLOSE,kernel,1)
blackhat = cv2.morphologyEx(gray, cv2.MORPH_BLACKHAT, kernel, 1)
src_dst = np.hstack((gray, blackhat))
cv2.imshow("close",close)
cv2.imshow("src_dst",src_dst)
cv2.waitKey(0)
cv2.destroyAllWindows()
运行结果:


七、梯度计算,sobel算子,scharr算子,laplacian算子
import cv2
import numpy
"""--------------梯度计算,边缘--------------"""
img = cv2.imread("2.jpg", cv2.IMREAD_GRAYSCALE)
#图像梯度Sobel算子
sobelx = cv2.Sobel(img,cv2.CV_64F, ksize=3, dx=1, dy=0)
sobely = cv2.Sobel(img,cv2.CV_64F, ksize=3, dx=0, dy=1)
sobelx = cv2.convertScaleAbs(sobelx)
sobely = cv2.convertScaleAbs(sobely)
#图像梯度Scharr算子,soebl的增强版
scharrx = cv2.Scharr(img,cv2.CV_64F, dx=1, dy=0)
scharry = cv2.Scharr(img,cv2.CV_64F, dx=0, dy=1)
scharrx = cv2.convertScaleAbs(scharrx)
scharry = cv2.convertScaleAbs(scharry)
#图像梯度拉普拉斯算子
lp = cv2.Laplacian(img,cv2.CV_64F,ksize=3)
lp = cv2.convertScaleAbs(lp)
sobel_img = cv2.addWeighted(sobelx,0.5,sobely,0.5,0)
scharr_img = cv2.addWeighted(scharrx,0.5,scharry,0.5,0)
dst = np.hstack((sobel_img, scharr_img, lp))
cv2.namedWindow("dst", cv2.WINDOW_NORMAL)
cv2.imshow("dst", dst)
cv2.waitKey(0)
cv2.destroyAllWindows()
八、边缘检测Canny算子
过程:
(1)高斯平滑处理
(2)梯度计算、方向计算
(3)NMS非极大值抑制:有两种方式
(4)双阈值:官网文档建议比例rate为1:2~1:3
(5)通过抑制孤弱的孤立点刻画出边缘
import cv2
import numpy as np
img = cv2.imread("3.jpg", cv2.IMREAD_GRAYSCALE)
#高斯处理
# img = cv2.GaussianBlur(img,(3,3),1)
#边缘检测Canny,
img = cv2.Canny(img,10,30)
cv2.namedWindow("img", cv2.WINDOW_NORMAL)
cv2.imshow("img", img)
cv2.waitKey(0)
cv2.destroyAllWindows()
九、图像金字塔
(1)高斯金字塔
import cv2
import numpy as np
img = cv2.imread("0IUO1B5C.jpg", cv2.IMREAD_COLOR) #人民币100元图像
# 图像金字塔
img_d1 = cv2.pyrDown(img) #下采样
img_u1 = cv2.pyrUp(img_d1) #上采样
cv2.imshow("img",img)
cv2.imshow("img_d1",img_d1)
cv2.imshow("img_u1",img_u1)
cv2.waitKey(0)
cv2.destroyAllWindows()
(2)拉普拉斯金字塔
先对图像进行下采样,再上采样,最后用原图像与上采用后的图像做差
import cv2
import numpy as np
img = cv2.imread("0IUO1B5C.jpg", cv2.IMREAD_COLOR)
# 图像金字塔
img_d1 = cv2.pyrDown(img) #下采样
print(img_d1.shape)
img_u1 = cv2.pyrUp(img_d1) #上采样
img_u1 = cv2.resize(img_u1,(795,424))
print(img_u1.shape)
print("---scr:",img.shape)
#拉普拉斯金字塔
img_lp = img + img_u1
cv2.imshow("img",img)
cv2.imshow("img_d1",img_d1)
cv2.imshow("img_u1",img_u1)
cv2.imshow("lp",img_lp)
cv2.waitKey(0)
cv2.destroyAllWindows()
十、轮廓检测(车牌)
contours, hierarchy = cv2.findContours(image, mode, method[, contours[, hierarchy[, offset]]])
功能:对二值图像进行轮廓检测,轮廓用于目标检测、识别、形状分析(周长计算、面积计算)
参数:
mode:mode of the contour retrieval algorithm---轮廓检索方式
常用:
cv2.RETR_EXTERNAL---只检索外部轮廓
cv2.RETR_TREE
method:the contour approximation algorithm---轮廓逼近计算的方式
常用:
cv2.CHAIN_APPROX_SIMPLE---轮廓的4个点
cv2.CHAIN_APPROX_NONE---轮廓边的所有点
返回值:contours是个列表list,列表存放是轮廓点所组成的向量
"""示例:绘制外部边界"""
import cv2
#注意,一定要原图读取,再转为灰度图
img = cv2.imread("contours2.png")
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
contours, hierarchy = cv2.findContours(gray, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
draw_img = img.copy()
res = cv2.drawContours(draw_img, contours, -1, (0, 0, 255), 2)
cv2.imshow('img',img)
cv2.imshow("contours",res)
(2)轮廓的特征:边界框、面积、周长、质心
"""示例:绘制边界框boundingRect"""
import cv2
#注意,一定要原图读取,再转为灰度图
img = cv2.imread("contours2.png")
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
contours, hierarchy = cv2.findContours(gray, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
draw_img = img.copy()
res = cv2.drawContours(draw_img, contours, -1, (0, 0, 255), 2)
cv2.imshow('img',img)
cv2.imshow("contours",res)
#边界矩形
x,y,w,h = cv2.boundingRect(contours[0])
img_bounding = cv2.rectangle(res,(x,y),(x+w,y+h),(0,255,0),2)
# draw_img = cv2.rectangle(img,(x,y), (x+w,y+h),(0,255,0),2)
cv2.imshow("boundingRect",img_bounding)
cv2.waitKey(0)
cv2.destroyAllWindows()
(3)轮廓周长、面积计算:
"""轮廓周长、面积计算"""
import cv2
img = cv2.imread("contours2.png")
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(gray, 50, 255, cv2.THRESH_BINARY)
#寻找轮廓
contours, hierarchy = cv2.findContours(thresh,mode=cv2.RETR_EXTERNAL, method=cv2.CHAIN_APPROX_NONE)
#绘制轮廓
draw_img = img.copy()
res = cv2.drawContours(draw_img,contours,-1,(255,0,0),2)
#绘制轮廓外接的boundingRec
x,y,w,h = cv2.boundingRect(contours[0])
cv2.rectangle(res,(x,y),(x+w,y+h),(0,255,0),2)
#计算轮廓的面积
cnt = contours[0]
area = cv2.contourArea(cnt)
#计算轮廓的周长
length = cv2.arcLength(cnt,True)
#输出结果
cv2.putText(res,"area:%d, length:%d"%(area,length),(10,20),cv2.FONT_HERSHEY_COMPLEX,0.5,(0,0,255),2)
cv2.imshow("contour",res)
cv2.waitKey(0)
cv2.destroyAllWindows()
运行结果:

十一、模板匹配
eval()
result = cv2.matchTemplate(image, templ, method[, result[, mask]]
min_val, max_val, min_loc, max_loc = cv2.minMaxloc(imgage)
功能:对原始图像灰度图进行滑动匹配,返回一个尺寸为(W-w+1, H-h+1)的灰度图,灰度图中最亮或者最黑的位置为匹配的最佳结果。
参数:匹配对比的方式大致分为两大类六小种,一类是不带归一化的,一类是带归一化的相似性,分为六种
methods = ['cv.TM_CCOEFF', 'cv.TM_CCOEFF_NORMED', 'cv.TM_CCORR', 'cv.TM_CCORR_NORMED', 'cv.TM_SQDIFF', 'cv.TM_SQDIFF_NORMED'],其中最后两种取最小值为最佳匹配结果
"""模板匹配,匹配方法是TM_SQDIFF_NORMED,因此最小值是最佳结果"""
import cv2
#加载图片、模板
img = cv2.imread("lena.jpg",0)
template = cv2.imread("face.jpg",0)
w, h = template.shape[::-1]
#对比方式 TM_SQDIFF_NORMED
res = cv2.matchTemplate(img,template,cv2.TM_SQDIFF_NORMED) #返回一个灰度图像,尺寸为(W-w+1, H-h+1)
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(res)
#对结果绘制
cv2.imshow("res",res)
draw_img = img.copy()
cv2.rectangle(draw_img,(min_loc[0],min_loc[1]), (min_loc[0]+w,min_loc[1]+h),(255,0,0),2)
cv2.imshow("draw",draw_img)
cv2.waitKey(0)
cv2.destroyAllWindows()
运行结果:


十一、图像几何变换
(1)透视变换
功能:矫正文本
相关API接口:
1.求取M矩阵: M = cv2.getPerspectiveTransform(src, dst)
2.warped = cv2.warpPerspective(src, M, dsize)
注意:求取M矩阵的src和dst必须是float32数据类型,四个points中三三不得共线;
dsize的尺寸形式是(width, height)
"""myutils"""
import cv2
import numpy as np
def show(name, img):
# cv2.namedWindow(name, cv2.WINDOW_NORMAL)
# cv2.namedWindow(name, cv2.WINDOW_KEEPRATIO)
cv2.imshow(name, img)
cv2.waitKey(0)
cv2.destroyAllWindows()
def resize(img, width=None, height=None):
rows, cols = img.shape[0:2]
if width==None and height==None:
return img
if width:
rate = cols / float(width)
height = int(rows / rate)
return cv2.resize(img, (width,height), interpolation=cv2.INTER_AREA)
if height:
rate = rows / float(height)
width = int(cols / rate)
return cv2.resize(img, (width,height), interpolation=cv2.INTER_AREA)
def four_point_transform(img,points):
"""对四个点进行排序,并求出最大width,height,进而确定dst尺寸"""
points = sorted(points, key=lambda x:x[0])
# print("points",points)
# print("type:",type(points))
tl, bl, tr, br = points
tw = np.sqrt((tr[0] - tl[0])**2 + (tr[1] - tl[1])**2) # 上边宽度
bw = np.sqrt((br[0] - bl[0])**2 + (br[1] - bl[1])**2) # 底边宽度
lh = np.sqrt((bl[0] - tl[0])**2 + (bl[1] - tl[1])**2) # 左边高度
rh = np.sqrt((br[0] - tr[0])**2 + (br[1] - tr[1])**2) # 右边高度
# print("rate shape", rate.shape)
# print("tw shape", tw.shape)
maxWidth = max((int(tw), int(bw)))
print("maxWidth type:", type(maxWidth))
maxHeight = max((int(lh), int(rh)))
print("maxWidth", maxWidth)
print("maxHeight", maxHeight)
# 变换后对应的坐标
dst = np.array([
[0, 0],
[0, maxHeight - 1],
[maxWidth-1, 0],
[maxWidth-1, maxHeight-1]], dtype="float32")
#把point转为ndarray
points = np.array(points, dtype="float32")
# 计算变换矩阵M,进行透视变换
M = cv2.getPerspectiveTransform(points, dst)
# warped = cv2.warpPerspective(img, M, (maxHeight, maxWidth))
warped = cv2.warpPerspective(img, M, (maxWidth, maxHeight))
# warped = cv2.warpPerspective(img, M, (maxHeight, maxHeight))
return warped
"""main"""
import cv2
import numpy as np
import argparse
import sys
from myutils import *
EPSILON = 0.1
argparse = argparse.ArgumentParser()
argparse.add_argument("-i","--image", required=True, help="path to add the image you will process")
args = vars(argparse.parse_args())
# 加载图片
img = cv2.imread(args["image"], cv2.IMREAD_COLOR)
orig = img.copy()
ratio = img.shape[0] / 500.0
draw_img = resize(img.copy(), height=500)
# show("img",img)
# 图片预处理:转为灰度图,尺寸缩小,高斯去噪, canny边缘检测
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
gray = resize(gray, height=500)
blur = cv2.GaussianBlur(gray,(5,5),sigmaX=0)
# thresh = cv2.threshold(blur,50)
show("blur", blur)
edge = cv2.Canny(blur,90,200)
show("edge", edge)
# 提取轮廓
contour = cv2.findContours(edge, mode=cv2.RETR_EXTERNAL, method=cv2.CHAIN_APPROX_SIMPLE)[0]
# print("contour",contour)
# print("contour type:",type(contour))
# 轮廓近似
length = cv2.arcLength(contour[0], True)
# 逼近轮廓
approx = cv2.approxPolyDP(contour[0], epsilon=EPSILON * length, closed=True)
# 去除冗余的维度
approx = np.squeeze(approx)
print("approx's shape: ",approx.shape)
# 四点排序,求出最大的width,heigth,以及dst尺寸,计算变换矩阵M,进行透视变换
warped = four_point_transform(orig, approx.reshape(4,2) * ratio)
# 二值处理
ref = cv2.cvtColor(warped,cv2.COLOR_BGR2GRAY)
# ref = cv2.threshold(warped, 100, 255, cv2.THRESH_BINARY)[1]
cv2.imshow("Scanned", resize(ref, height = 650))
cv2.waitKey(0)
结果:


示例2:

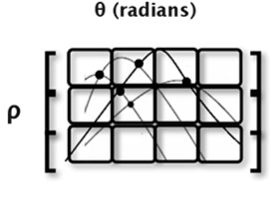
十一、霍夫变换直线检测(车道线检测)
接口API:cv2.HoughLinesP()
参数:第二、第三个参数表示的是resolution of the Hough accumulator arrary (2D) ,俗称grid、bin,因此,第二第三参数指定了bin的大小,bin越大,精度越低,一般选择two pixels and one degree precesion
第四参数:threshold---minimum number of votes needed to accept a candidate line(根据最优情况选择,如100)
第五参数:minLineLength=40, indicating the minimum length of line in pixels that we will accpet into output.
第六:maxLanGap = 5,indicating maxmum distance in pixels between segmented lines which allows be connected into a single line instead of them being broken up



"""myutils"""
import cv2
import numpy as np
def img_process(img):
"""
对图片进行预处理:转为灰度图,高斯降噪,边缘检测
:param img:
:return:blur_
"""
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
blur = cv2.GaussianBlur(gray, (5,5), 0)
edge = cv2.Canny(blur,20,80)
cv2.imwrite("edge.png", edge)
return edge
def roi_extract(img):
"""
生成掩码,提取ROI
:param img:
:return: roi
"""
# 生成掩码,提取ROI
mask = np.zeros_like(img, dtype=np.int8)
# print(mask)
points = np.array([[[300,217], [350,217], [570,366], [92,366]]], dtype=np.int32)
mask = cv2.fillPoly(mask,points, color=255)
# print(mask)
roi = cv2.bitwise_and(img,img,mask=mask)
# cv2.imshow("roi",roi)
# cv2.waitKey(0)
# cv2.destroyAllWindows()
cv2.imwrite("roi.png", roi)
return roi
def line_detect(img):
"""
霍夫变换检测直线,获取一系列点对,进一步筛选左右直线的点对,离群点过滤
:param img:
:return: 一系列优质的点对
"""
lines = cv2.HoughLinesP(img, rho=1, theta=np.pi/180, threshold=15, minLineLength=40, maxLineGap=20)
# print("lines numbers:",len(lines))
# print("lines shape:",lines.shape)
# print("lines type:",type(lines))
#筛选左右直线
left_lines = [line for line in lines if calculate_slopes(line) < 0]
right_lines = [line for line in lines if calculate_slopes(line) > 0]
# print("left_lines",left_lines)
# print("left_lines numbers:",len(left_lines))
# print("right_lines",right_lines)
print("right_lines nums:",len(right_lines),"\nleft_lines nums",len(left_lines))
return left_lines, right_lines
def calculate_slopes(point):
"""
计算直线的斜率,并筛选出左右直线
:param points: 2-D shape np.array([[x1, y1, x2, y2])
:return: slope
"""
(x1, y1, x2, y2) = point[0]
slope = (y2-y1) / (x2-x1)
return slope
def filter_lines(lines, threshold):
"""
离群值过滤,对于斜率偏移严重的直线进行过滤
:param lines: list[,np.array([[x1,y1,x2,y2]],]
:return:
"""
#对斜率进行标准化
slopes = [calculate_slopes(line) for line in lines]
while len(slopes)>0:
mean_slopes = np.min(slopes)
diff = [abs(slope-mean_slopes) for slope in slopes]
idx = np.argmax(diff)
if diff[idx] > threshold:
slopes.pop(idx)
lines.pop(idx)
else:
break
return lines
def fit(lines):
"""
用最小二乘拟合法,将线段拟合成一条直线
:param lines: [np.array([[x1,y1,x2,y2]]),...,np.array([[x1,y1,x2,y2]])]
:return:
"""
# 1. 取出所有坐标点
x_coords = np.ravel([[line[0][0], line[0][2]]for line in lines])
y_coords = np.ravel([[line[0][1], line[0][3]]for line in lines])
# 2. 进行多项式拟合,得到多项式系数 k, b
pooly = np.polyfit(x_coords,y_coords,deg=1) # np.array([k,b]
print("pooly:",pooly)
# 3. 根据多项式系数,计算一条直线上的两个端点,用于唯一确定这条直线
min_point = (np.min(x_coords), np.polyval(pooly, np.min(x_coords)))
max_point = (np.max(x_coords), np.polyval(pooly, np.max(x_coords)))
return np.array([min_point, max_point], dtype=np.int)
"""main"""
import cv2
import numpy as np
import matplotlib.pyplot as plt
import argparse
from myutils import *
parse = argparse.ArgumentParser()
parse.add_argument("-i", "--image", help="path to the image detected")
parse.add_argument("-v", "--video",help="path to the video detected")
args = parse.parse_args()
# 传入图片
if args.image:
img = cv2.imread(args.image)
orig = img.copy()
# cv2.imshow("img",img)
# cv2.waitKey(0)
edge = img_process(img) # 图像预处理,返回边缘检测图像
roi = roi_extract(edge) # 提取ROI
left_lines, right_lines = line_detect(roi) # 左右线分类
print("left_lines:",left_lines)
print("right_lines", right_lines)
# 离群值过滤
filterleft_lines = filter_lines(left_lines,0.2)
filterright_lines = filter_lines(right_lines,0.2)
# print("filterleft_lines:",filterleft_lines,"\tfilterright_lines:",len(filterright_lines))
# 最小二乘拟合
fit_leftline_points = fit(filterleft_lines)
fit_rightline_points = fit(filterright_lines)
print(fit_leftline_points)
line = cv2.line(orig,tuple(fit_leftline_points[0]),tuple(fit_leftline_points[1]),(0,255,0),5)
line = cv2.line(orig,tuple(fit_rightline_points[0]),tuple(fit_rightline_points[1]),(0,255,0),5)
cv2.imshow("line",line)
cv2.waitKey(0)
if args.video:
cap = cv2.VideoCapture(args.video)
while(cap.isOpened()):
ret, frame = cap.read()
orig = frame.copy() # 用于图画
orig2 = frame.copy() # 原始图画
edge = img_process(frame) # 图像预处理,返回边缘检测图像
roi = roi_extract(edge) # 提取ROI
left_lines, right_lines = line_detect(roi) # 左右线分类
print("left_lines:", left_lines)
print("right_lines", right_lines)
# 离群值过滤
filterleft_lines = filter_lines(left_lines, 0.2)
filterright_lines = filter_lines(right_lines, 0.2)
# print("filterleft_lines:",filterleft_lines,"\tfilterright_lines:",len(filterright_lines))
# 最小二乘拟合
fit_leftline_points = fit(filterleft_lines)
fit_rightline_points = fit(filterright_lines)
print(fit_leftline_points)
line = cv2.line(orig, tuple(fit_leftline_points[0]), tuple(fit_leftline_points[1]), (0, 255, 0), 5)
line = cv2.line(orig, tuple(fit_rightline_points[0]), tuple(fit_rightline_points[1]), (0, 255, 0), 5)
cv2.imshow("frame",orig2)
cv2.imshow("line", line)
if cv2.waitKey(1) == ord("q"):
break
cap.release()
cv2.destroyAllWindows()
(2)高级车道线检测(弯道)
"""---myutils---"""
import cv2
import numpy as np
import pickle
import queue
LEFT_LANE_A = queue.Queue(maxsize=15)
LEFT_LANE_B = queue.Queue(maxsize=15)
LEFT_LANE_C = queue.Queue(maxsize=15)
RIGHT_LANE_A = queue.Queue(maxsize=15)
RIGHT_LANE_B = queue.Queue(maxsize=15)
RIGHT_LANE_C = queue.Queue(maxsize=15)
left_a_sum = 0
left_b_sum = 0
left_c_sum = 0
right_a_sum = 0
right_b_sum = 0
right_c_sum = 0
LEFT_LANE_A_REAL = queue.Queue(maxsize=15)
LEFT_LANE_B_REAL = queue.Queue(maxsize=15)
LEFT_LANE_C_REAL = queue.Queue(maxsize=15)
RIGHT_LANE_A_REAL = queue.Queue(maxsize=15)
RIGHT_LANE_B_REAL = queue.Queue(maxsize=15)
RIGHT_LANE_C_REAL = queue.Queue(maxsize=15)
left_a_sum_real = 0
left_b_sum_real = 0
left_c_sum_real = 0
right_a_sum_real = 0
right_b_sum_real = 0
right_c_sum_real = 0
def empty(x):
pass
def undistort(img, caliFile):
with open(caliFile, "rb") as f:
file = pickle.load(f)
mtx = file["mtx"]
dist = file["dist"]
img = cv2.undistort(img,mtx,dist,None,mtx)
return img
def createTrackbar():
cv2.namedWindow("TrackBar")
cv2.resizeWindow("Bar",640, 480)
cv2.createTrackbar("topWidth", "TrackBar", 43, 50, empty)
cv2.createTrackbar("topHeight", "TrackBar", 63, 179, empty)
cv2.createTrackbar("bottomWidth", "TrackBar", 14, 50, empty)
cv2.createTrackbar("bottomHeight", "TrackBar", 93, 100, empty)
# hue_min = cv2.getTrackbarPos("Hue_min", "Bar")
# hue_max = cv2.getTrackbarPos("Hue_max", "Bar")
# sat_min = cv2.getTrackbarPos("Sat_min", "Bar")
# sat_max = cv2.getTrackbarPos("Sat_max", "Bar")
# val_min = cv2.getTrackbarPos("Val_min", "Bar")
# val_max = cv2.getTrackbarPos("Val_max", "Bar")
def getTrackbar():
topWidth = cv2.getTrackbarPos("topWidth", "TrackBar")
topHeight = cv2.getTrackbarPos("topHeight", "TrackBar")
bottomWidth = cv2.getTrackbarPos("bottomWidth", "TrackBar")
bottomHeight = cv2.getTrackbarPos("bottomHeight", "TrackBar")
# hue_min = cv2.getTrackbarPos("Hue_min", "Bar")
# hue_max = cv2.getTrackbarPos("Hue_max", "Bar")
# sat_min = cv2.getTrackbarPos("Sat_min", "Bar")
# sat_max = cv2.getTrackbarPos("Sat_max", "Bar")
# val_min = cv2.getTrackbarPos("Val_min", "Bar")
# val_max = cv2.getTrackbarPos("Val_max", "Bar")
# return hue_min, hue_max, sat_min, sat_max, val_min, val_max
return topWidth, topHeight, bottomWidth, bottomHeight
def colorsFilter(img):
"""
黄色、白色检测
:param img:
:return:
"""
lowerYellow = np.array([0, 86, 228])
upperYellow = np.array([179, 255, 255])
lowerWhite = np.array([0, 0, 200])
upperWhite = np.array([255, 255, 255])
# lowerYellow = np.array([18,94,140])
# upperYellow = np.array([48,255,255])
# lowerWhite = np.array([0, 0, 200])
# upperWhite = np.array([255, 255, 255])
blurHSV = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
maskYellow = cv2.inRange(blurHSV, lowerYellow, upperYellow)
maskWhihe = cv2.inRange(blurHSV, lowerWhite, upperWhite)
mask = cv2.bitwise_or(maskYellow, maskWhihe)
return mask
#===============================
def threshoding(img):
"""
对图像进行预处理
:param img:
:return:
"""
# 1.高斯模糊,边缘检测,闭运算
kenel = np.ones((5,5),dtype=np.uint8)
blur = cv2.GaussianBlur(img, (5,5), 0)
canny = cv2.Canny(blur,50, 100)
# canny = cv2.Canny(blur,50, 100)
imgClose = cv2.morphologyEx(canny, cv2.MORPH_CLOSE, kenel, iterations=1)
# 2.颜色过滤
imgColorsmask = colorsFilter(blur)
# 3.融合
imgCombined = cv2.bitwise_or(imgClose, imgColorsmask)
return imgCombined, imgClose, imgColorsmask
def warpPerspective(img, imgcolor,dstSize=(640,480)):
"""
根据trackbar选取的点,生成鸟瞰图
:param img: 融合的图片
:param imgcolor: 矫正后的彩色图片
:return:srcPoints原始图像中的坐标点(float32),用于下一次的逆透视变换作为dst
dstPoints是用于作为下一次逆透视变换中的src,该数据已经是图像尺度的坐标
"""
# 获取trackbar的值
topWidth, topHeight, bottomWidth, bottomHeight = getTrackbar()
# 获取4个点坐标,以及dst坐标
topLeft = (topWidth/100, topHeight/100)
topRight = (1-topWidth/100, topHeight/100)
bottomLeft = (bottomWidth/100, bottomHeight/100)
bottomRight = (1-bottomWidth/100, bottomHeight/100)
srcPoints = np.float32([topLeft,topRight,bottomLeft,bottomRight])
srcPoints = np.array(srcPoints * np.float32([(img.shape[1], img.shape[0])]), dtype="float32")
dstPoints = np.array(np.float32([(0,0),(1,0), (0,1), (1,1)])*dstSize, dtype="float32")
# 求取M矩阵,生成鸟蓝图
M = cv2.getPerspectiveTransform(srcPoints, dstPoints)
warped = cv2.warpPerspective(img, M, dstSize)
warpedColor = cv2.warpPerspective(imgcolor, M, dstSize)
return warped, warpedColor, srcPoints, dstPoints
def drawScreenpoints(img, screenPoints):
"""
在非失真图像上绘制4个点
:param img:
:param screenPoints:
:return:
"""
screenPoints = np.array(screenPoints, dtype=int)
for point in screenPoints:
cv2.circle(img, (point[0],point[1]), 10, (0,0,255), cv2.FILLED)
def getHist(img):
"""
统计像素值
:param img:
:return:
"""
hist= np.sum(img[img.shape[0]//2:, :], axis=0)
return hist
def slidingWins(imgWarp, winNum=15, margin=50):
"""
先对鸟瞰图统计直方图,确定左右两边最大的像素值
:param imgWarp:
:param winNum:
:param margin:
:return: 鸟蓝图的矩形框绘制以及上色、左右车道线二次曲线的参数
"""
imgDrawrect = np.dstack((imgWarp, imgWarp, imgWarp))
histogram = getHist(imgWarp)
midpoint = imgWarp.shape[1] // 2
leftBase = np.argmax(histogram[:midpoint])
rightBase= np.argmax(histogram[midpoint:]) + midpoint
# 确定窗口的高度
winHeight = np.int(imgWarp.shape[0] / winNum)
# 确定图像中像素值不为0的像素点x,y坐标
nonezero = np.nonzero(imgWarp)
nonezerox = nonezero[1]
nonezeroy = nonezero[0]
letfLanepointidx = []
rightLanepointidx = []
leftCurrent, rightCurrent = leftBase, rightBase
# 滑动窗口,对上面找到的所有不为0的像素点坐标x,y进行分类,左、右
for win in range(winNum):
# 左车道线框
leftwin_leftx = leftCurrent - margin
leftwin_rightx = leftCurrent + margin
leftwin_topy = imgWarp.shape[0] - (win+1) * winHeight
leftwin_bottomy = imgWarp.shape[0] - win * winHeight
# 右车道线框
rightwin_leftx = rightCurrent - margin
rightwin_rightx = rightCurrent + margin
rightwin_topy = imgWarp.shape[0] - (win+1) * winHeight
rightwin_bottomy = imgWarp.shape[0] - win * winHeight
cv2.rectangle(imgDrawrect, (leftwin_leftx,leftwin_topy), (leftwin_rightx, leftwin_bottomy), (0, 255, 255),2)
cv2.rectangle(imgDrawrect, (rightwin_leftx,rightwin_topy), (rightwin_rightx, rightwin_bottomy), (255, 0, 255),2)
# 对矩形框内左右车道线像素点idx,以列表保存
leftwinIdx = ((nonezeroy >= leftwin_topy) & (nonezeroy < leftwin_bottomy) &
(nonezerox >= leftwin_leftx) & (nonezerox < leftwin_rightx)).nonzero()[0]
rightwinIdx = ((nonezerox<rightwin_rightx) & (nonezerox>=rightwin_leftx) & (nonezeroy>=rightwin_topy) &
(nonezeroy<rightwin_bottomy)).nonzero()[0]
letfLanepointidx.append(leftwinIdx)
rightLanepointidx.append((rightwinIdx))
print(rightLanepointidx)
# 下一次窗口的中心
if len(leftwinIdx) > 1:
leftCurrent = np.int(np.mean(nonezerox[leftwinIdx]))
if len(rightwinIdx) > 1:
rightCurrent = np.int(np.mean(nonezerox[rightwinIdx]))
# 获取x, y值,进行曲线拟合
leftIdx = np.concatenate(letfLanepointidx)
leftXcor = nonezerox[leftIdx]
leftYcor = nonezeroy[leftIdx]
rightIdx = np.concatenate(rightLanepointidx)
rightXcor = nonezerox[rightIdx]
rightYcor = nonezeroy[rightIdx]
leftFit = np.polyfit(leftYcor, leftXcor, deg=2)
rightFit = np.polyfit(rightYcor, rightXcor, deg=2)
global left_a_sum, left_b_sum, left_c_sum, right_a_sum, right_b_sum, right_c_sum
# 左车道线
if LEFT_LANE_A.full() & LEFT_LANE_B.full()& LEFT_LANE_C.full():
la = LEFT_LANE_A.get()
lb = LEFT_LANE_B.get()
lc = LEFT_LANE_C.get()
left_a_sum -= la
left_b_sum -= lb
left_c_sum -= lc
LEFT_LANE_A.put(leftFit[0])
LEFT_LANE_B.put(leftFit[1])
LEFT_LANE_C.put(leftFit[2])
left_a_sum += leftFit[0]
left_b_sum += leftFit[1]
left_c_sum += leftFit[2]
no_of_leftlane_a_val = LEFT_LANE_A.qsize()
no_of_leftlane_b_val = LEFT_LANE_B.qsize()
no_of_leftlane_c_val = LEFT_LANE_C.qsize()
left_a = left_a_sum / no_of_leftlane_a_val
left_b = left_b_sum / no_of_leftlane_b_val
left_c = left_c_sum / no_of_leftlane_c_val
# 右车道线
if RIGHT_LANE_A.full() & RIGHT_LANE_B.full() & RIGHT_LANE_C.full():
la = RIGHT_LANE_A.get()
lb = RIGHT_LANE_B.get()
lc = RIGHT_LANE_C.get()
right_a_sum -= la
right_b_sum -= lb
right_c_sum -= lc
RIGHT_LANE_A.put(rightFit[0])
RIGHT_LANE_B.put(rightFit[1])
RIGHT_LANE_C.put(rightFit[2])
right_a_sum += rightFit[0]
right_b_sum += rightFit[1]
right_c_sum += rightFit[2]
no_of_rightlane_a_val = RIGHT_LANE_A.qsize()
no_of_rightlane_b_val = RIGHT_LANE_B.qsize()
no_of_rightlane_c_val = RIGHT_LANE_C.qsize()
right_a = right_a_sum / no_of_rightlane_a_val
right_b = right_b_sum / no_of_rightlane_b_val
right_c = right_c_sum / no_of_rightlane_c_val
#对鸟蓝图车道线上色
polyy = np.linspace(0,imgWarp.shape[0]-1, imgWarp.shape[0])
# polyxLeft = left_a*polyy*polyy + left_b*polyy + left_c
# polyxRight = right_a*polyy*polyy + right_b*polyy + right_c
imgDrawrect[leftYcor,leftXcor] = (255,0,0)
imgDrawrect[rightYcor,rightXcor] = (255,0,0)
return imgDrawrect, (left_a, left_b, left_c), (right_a, right_b, right_c), polyy
def fillLane(img, leftFit, rightFit, polyy, dst, dst_size, src):
"""
:param img:
:param leftFit: 左车道线参数(a, b, c)
:param rightFit: 右车道线参数(a,b,c)
:param polyy:
:param dst:
:param dst_size:
:param src:
:return:
"""
imgLane = np.zeros_like(img)
polyxLeft = leftFit[0]*polyy*polyy + leftFit[1]*polyy + np.array(leftFit[2])
polyxRight = rightFit[0]*polyy*polyy + rightFit[1]*polyy + np.array(rightFit[2])
polyy = np.array(polyy, dtype=np.int)
leftPoints = np.transpose(np.vstack((np.array(polyxLeft, dtype=np.int), polyy)))
rightPoints = np.flipud(np.transpose(np.vstack((np.array(polyxRight, dtype=np.int),polyy))))
points = np.vstack((leftPoints, rightPoints))
cv2.fillPoly(imgLane, np.array([[points]]),(255,0,0))
invsWarp = invswarpPerspective(imgLane, dst, dst_size, src)
# 图像融合,绘制车道
imgLane = cv2.addWeighted(img,0.8, invsWarp,0.4,0)
return imgLane
def invswarpPerspective(img, dst, dst_size, src):
"""
逆透视变换
:param img:
:param dst:
:param dst_size:
:param src:
:return:
"""
M = cv2.getPerspectiveTransform(src, dst)
invsWarp = cv2.warpPerspective(img, M, dst_size)
return invsWarp
def radiiAndcarposition(img, leftFit, rightFit, polyy):
"""
此函数用于计算左右车道线的曲率、平均曲率, 车偏离位置,
:param img
:param leftFit:左车道线的参数(a,b,c)
:param rightFit:右车道线的参数
:param polyy: y方向上的点,flaot32
:return:
"""
y_eval = np.argmax(polyy)
ym_per_pix = 1 / img.shape[0] # meters per pixel in y dimension
xm_per_pix = 0.1 / img.shape[0] # meters per pixel in x dimension
# 计算左车道线的曲率
leftLane_x = leftFit[0]*polyy*polyy + leftFit[1]**polyy +leftFit[2]
rightLane_x = rightFit[0]*polyy*polyy + rightFit[1]*polyy + rightFit[2]
# real_world coordinates
polyyCor = ym_per_pix * polyy
leftLane_xCor = leftLane_x * xm_per_pix
rightLane_xCor = rightLane_x * xm_per_pix
# 拟合曲线,再用队列,进行平均,
leftFit_real = np.polyfit(polyyCor,leftLane_xCor,deg=2)
rightFit_real = np.polyfit(polyyCor,rightLane_xCor,deg=2)
global left_a_sum_real, left_b_sum_real, left_c_sum_real, right_a_sum_real, right_b_sum_real, right_c_sum_real
#用队列,进行平均计算,减少误差
if LEFT_LANE_A_REAL.full() & LEFT_LANE_B_REAL.full() & LEFT_LANE_C_REAL.full():
# 弹出第一个值
la = LEFT_LANE_A_REAL.get()
lb = LEFT_LANE_B_REAL.get()
lc = LEFT_LANE_C_REAL.get()
left_a_sum_real -= la
left_b_sum_real -= lb
left_c_sum_real -= lc
LEFT_LANE_A_REAL.put(leftFit_real[0])
LEFT_LANE_B_REAL.put(leftFit_real[1])
LEFT_LANE_C_REAL.put(leftFit_real[2])
left_a_sum_real += leftFit_real[0]
print("left_a_sum_real",left_a_sum_real)
left_b_sum_real += leftFit_real[1]
left_c_sum_real += leftFit_real[2]
left_a_real = left_a_sum_real / LEFT_LANE_A_REAL.qsize()
print("left_a_real",left_a_real)
left_b_real = left_b_sum_real / LEFT_LANE_B_REAL.qsize()
left_c_real = left_c_sum_real / LEFT_LANE_C_REAL.qsize()
if RIGHT_LANE_A_REAL.full():
# 弹出第一个值
la = RIGHT_LANE_A_REAL.get()
lb = RIGHT_LANE_B_REAL.get()
lc = RIGHT_LANE_C_REAL.get()
right_a_sum_real -= la
right_b_sum_real -= lb
right_c_sum_real -= lc
RIGHT_LANE_A_REAL.put(rightFit_real[0])
RIGHT_LANE_B_REAL.put(rightFit_real[1])
RIGHT_LANE_C_REAL.put(rightFit_real[2])
right_a_sum_real += rightFit_real[0]
right_b_sum_real += rightFit_real[1]
right_c_sum_real += rightFit_real[2]
right_a_real = right_a_sum_real / RIGHT_LANE_A_REAL.qsize()
right_b_real = right_b_sum_real / RIGHT_LANE_B_REAL.qsize()
right_c_real = right_c_sum_real / RIGHT_LANE_C_REAL.qsize()
leftFit_real = np.array([left_a_real,left_b_real,left_c_real])
rightFit_real = np.array([right_a_real,right_b_real,right_c_real])
# real_word_radii_of_curature
# r = [1+(2ay+b)**2]**1.5 / 2a
# 计算左车道曲率半径
left_curverad = (1 + (leftFit_real[0]*y_eval*ym_per_pix+leftFit_real[1])**2)**1.5 / np.absolute(2*leftFit_real[0])
right_curverad = (1+ (rightFit_real[0]*y_eval*ym_per_pix+rightFit_real[1])**2)**1.5 / np.absolute(2*rightFit_real[0])
curve_radius = (left_curverad+right_curverad)/2
# 计算车在图像中的位置,车道像素的宽度,从而确定车的方向
car_position = (img.shape[1] / 2)
laneWidth, lanecenterPosition = getLanewidth(leftFit, rightFit,img)
# 计算center_distance
centerDistance = (car_position-lanecenterPosition) * xm_per_pix
direction = getDirection(centerDistance)
return curve_radius, direction, centerDistance
def getLanewidth(leftFit, rightFit, img):
"""
在像素上计算车道宽度
:param leftFit:
:param rightFit:
:param img:
:return:
"""
leftlane = leftFit[0]*img.shape[0]*img.shape[0] + leftFit[1]*img.shape[0] + leftFit[2]
rightlane = rightFit[0]*img.shape[0]*img.shape[0] + rightFit[1]*img.shape[0] + rightFit[2]
lane_width = leftlane-rightlane
lanecenterPosition = (leftlane + rightlane) / 2
return lane_width, lanecenterPosition
def getDirection(centerDistance):
dirction = ''
if centerDistance>0:
dirction = "right"
return dirction
elif centerDistance<0:
dirction = "left"
return dirction
def puttext(frameWidth,laneFilled,curve_radius, direction, centerDistance):
cv2.putText(laneFilled,"RadiusOfCurvature:" +str(round(curve_radius,1)),(frameWidth//3-70, 70),cv2.FONT_HERSHEY_DUPLEX,1,(0,0,255), 2, cv2.LINE_AA)
cv2.putText(laneFilled, "Dirction: " + direction,(frameWidth//3-70,100),cv2.FONT_HERSHEY_DUPLEX,1,(0,0,255), 2, cv2.LINE_AA)
cv2.putText(laneFilled, "CenterDistance: " + str(round(centerDistance,4)),(frameWidth//3-70,130),cv2.FONT_HERSHEY_DUPLEX,1,(0,0,255), 2, cv2.LINE_AA)
def stackImages(scale,imgArray):
rows = len(imgArray)
cols = len(imgArray[0])
rowsAvailable = isinstance(imgArray[0], list)
width = imgArray[0][0].shape[1]
height = imgArray[0][0].shape[0]
if rowsAvailable:
for x in range ( 0, rows):
for y in range(0, cols):
if imgArray[x][y].shape[:2] == imgArray[0][0].shape [:2]:
imgArray[x][y] = cv2.resize(imgArray[x][y], (0, 0), None, scale, scale)
else:
imgArray[x][y] = cv2.resize(imgArray[x][y], (imgArray[0][0].shape[1], imgArray[0][0].shape[0]), None, scale, scale)
if len(imgArray[x][y].shape) == 2: imgArray[x][y]= cv2.cvtColor( imgArray[x][y], cv2.COLOR_GRAY2BGR)
imageBlank = np.zeros((height, width, 3), np.uint8)
hor = [imageBlank]*rows
hor_con = [imageBlank]*rows
for x in range(0, rows):
hor[x] = np.hstack(imgArray[x])
ver = np.vstack(hor)
else:
for x in range(0, rows):
if imgArray[x].shape[:2] == imgArray[0].shape[:2]:
imgArray[x] = cv2.resize(imgArray[x], (0, 0), None, scale, scale)
else:
imgArray[x] = cv2.resize(imgArray[x], (imgArray[0].shape[1], imgArray[0].shape[0]), None,scale, scale)
if len(imgArray[x].shape) == 2: imgArray[x] = cv2.cvtColor(imgArray[x], cv2.COLOR_GRAY2BGR)
hor= np.hstack(imgArray)
ver = hor
return ver
"""---main---"""
import cv2
import numpy as np
import argparse
import myutils
CAMERA_AVAILABLE = False
FRAME_WIDTH = 640
FRAME_HEIGHT = 480
CALIBRATION_PATH = "cal_pickle.p"
# 1.传入参数
parser = argparse.ArgumentParser()
parser.add_argument("-i", "--image", required=False,
help="path to add the image detected.")
parser.add_argument("-v", "--video", required=False,
help="path to add the video detected.")
args = parser.parse_args()
if CAMERA_AVAILABLE:
cap = cv2.VideoCapture(0)
elif args.video:
cap = cv2.VideoCapture(args.video)
fourcc = cv2.VideoWriter_fourcc(*'XVID') #编码器
# 创建Trackbar,用于生成鸟瞰图
valBar = myutils.createTrackbar()
while(cap.isOpened()):
_, frame =cap.read()
frame = cv2.resize(frame, (FRAME_WIDTH, FRAME_HEIGHT))
# 1.图像矫正
img = myutils.undistort(frame, CALIBRATION_PATH)
imgDrwapoints = img.copy()
# 2.图像预处理
imgCombined, imgClose, imgColorsmask = myutils.threshoding(img)
# 3.鸟瞰图
warp, warpedColor, srcPoints, dstPoints = myutils.warpPerspective(imgCombined, img)
# 4.在原始是视频上可视化4个点,方便调节trackbar
myutils.drawScreenpoints(imgDrwapoints, srcPoints)
# 5.鸟瞰图的直方图统计,确定最大像素值位置,进而确定BOX的位置,滑动窗口,
imgDrawrect, leftFit, rightFit, polyy = myutils.slidingWins(warp,)
# 6.对鸟蓝图中的车道进行填充,再逆透视变换,与原始图像融合
laneFilled = myutils.fillLane(img, leftFit, rightFit, polyy, dst=srcPoints,
dst_size=(FRAME_WIDTH,FRAME_HEIGHT), src=dstPoints)
# 7.计算曲率,车偏离车道中心的位置,以及车的方位(左右)
curve_radius, direction, centerDistance = myutils.radiiAndcarposition(img, leftFit, rightFit, polyy)
# 8.显示信息:
myutils.puttext(FRAME_WIDTH,laneFilled,curve_radius, direction, centerDistance)
# cv2.imshow("frame",frame)
imgStacked = myutils.stackImages(0.6,[[img,warpedColor,imgDrwapoints],
[imgClose,imgColorsmask,imgCombined],
[warp,imgDrawrect,laneFilled]])
cv2.imshow("imgStacked",imgStacked)
cv2.imshow("result",laneFilled)
if cv2.waitKey(1) == ord("q"):
break
cap.release()
cv2.destroyAllWindows()
关于曲率的数学模型
https://www.intmath.com/applications-differentiation/8-radius-curvature.php