Pytorch(一)——Pytorch基础知识
文章目录
-
- Pytorch学习资源
- 1.张量
-
- 创建tensor
- 张量的操作
- 广播机制
- 2.自动求导
-
- Autograd简介
- 梯度
- 3.并行计算简介
之前学习Pytorch已经比较久远了,本次学习是跟着datawhale的《深入浅出Pytorch》进行回顾和查缺补漏,以下是个人笔记,如果侵权咱就删。
Pytorch学习资源
- Awesome-pytorch-list:目前已获12K Star,包含了NLP,CV,常见库,论文实现以及Pytorch的其他项目。
- PyTorch官方文档:官方发布的文档,十分丰富。
- Pytorch-handbook:GitHub上已经收获14.8K,pytorch手中书。
- PyTorch官方社区:PyTorch拥有一个活跃的社区,在这里你可以和开发pytorch的人们进行交流。
- PyTorch官方tutorials:官方编写的tutorials,可以结合colab边动手边学习
- 动手学深度学习:动手学深度学习是由李沐老师主讲的一门深度学习入门课,拥有成熟的书籍资源和课程资源,在B站,Youtube均有回放。
- Awesome-PyTorch-Chinese:常见的中文优质PyTorch资源
1.张量
张量是现代机器学习的基础。它的核心是一个数据容器,多数情况下,它包含数字,有时候它也包含字符串,但这种情况比较少。因此可以把它想象成一个数字的水桶。
例子:一个图像可以用三个字段表示:
(width, height, channel) = 3D
但是,在机器学习工作中,我们经常要处理不止一张图片或一篇文档——我们要处理一个集合。我们可能有10,000张郁金香的图片,这意味着,我们将用到4D张量:
(batch_size, width, height, channel) = 4D
创建tensor
随机初始化矩阵 我们可以通过torch.rand()的方法,构造一个随机初始化的矩阵:
import torch
x = torch.rand(4, 3)
print(x)
tensor([[0.7569, 0.4281, 0.4722],
[0.9513, 0.5168, 0.1659],
[0.4493, 0.2846, 0.4363],
[0.5043, 0.9637, 0.1469]])
全0矩阵的构建 我们可以通过torch.zeros()构造一个矩阵全为 0,并且通过dtype设置数据类型为 long。除此以外,我们还可以通过torch.zero_()和torch.zeros_like()将现有矩阵转换为全0矩阵.
import torch
x = torch.zeros(4, 3, dtype=torch.long)
print(x)
tensor([[0, 0, 0],
[0, 0, 0],
[0, 0, 0],
[0, 0, 0]])
a = torch.randn(3,4)
print(a.zero_())
tensor([[0., 0., 0., 0.],
[0., 0., 0., 0.],
[0., 0., 0., 0.]])
a = torch.rand(3,4) # 产生一个3行4列的0~1的随机Tensor
b = torch.zeros_like(a)
print(b)
tensor([[0., 0., 0., 0.],
[0., 0., 0., 0.],
[0., 0., 0., 0.]])
张量的构建 我们可以通过torch.tensor()直接使用数据,构造一个张量:
import torch
x = torch.tensor([5.5, 3])
print(x)
tensor([5.5000, 3.0000])
基于已经存在的 tensor,创建一个 tensor :
x = x.new_ones(4, 3, dtype=torch.double)
# 创建一个新的全1矩阵tensor,返回的tensor默认具有相同的torch.dtype和torch.device
# 也可以像之前的写法 x = torch.ones(4, 3, dtype=torch.double)
print(x)
x = torch.randn_like(x, dtype=torch.float)
# 重置数据类型
print(x)
# 结果会有一样的size
# 获取它的维度信息
print(x.size())
print(x.shape)
tensor([[1., 1., 1.],
[1., 1., 1.],
[1., 1., 1.],
[1., 1., 1.]], dtype=torch.float64)
tensor([[ 2.7311, -0.0720, 0.2497],
[-2.3141, 0.0666, -0.5934],
[ 1.5253, 1.0336, 1.3859],
[ 1.3806, -0.6965, -1.2255]])
torch.Size([4, 3])
torch.Size([4, 3])
返回的torch.Size其实是一个tuple,⽀持所有tuple的操作。我们可以使用索引操作取得张量的长、宽等数据维度。
| 函数 | 功能 |
|---|---|
| Tensor(sizes) | 基础构造函数 |
| tensor(data) | 类似于np.array |
| ones(sizes) | 全1 |
| zeros(sizes) | 全0 |
| eye(sizes) | 对角为1,其余为0 |
| arange(s,e,step) | 从s到e,步长为step |
| linspace(s,e,steps) | 从s到e,均匀分成step份 |
| rand/randn(sizes) | rand是[0,1)均匀分布;randn是服从N(0,1)的正态分布 |
| normal(mean,std) | 正态分布(均值为mean,标准差是std) |
| randperm(m) | 随机排列 |
张量的操作
1.加法操作
import torch
# 方式1
y = torch.rand(4, 3)
print(x + y)
# 方式2
print(torch.add(x, y))
# 方式3 in-place,原值修改
y.add_(x)
print(y)
tensor([[ 2.8977, 0.6581, 0.5856],
[-1.3604, 0.1656, -0.0823],
[ 2.1387, 1.7959, 1.5275],
[ 2.2427, -0.3100, -0.4826]])
tensor([[ 2.8977, 0.6581, 0.5856],
[-1.3604, 0.1656, -0.0823],
[ 2.1387, 1.7959, 1.5275],
[ 2.2427, -0.3100, -0.4826]])
tensor([[ 2.8977, 0.6581, 0.5856],
[-1.3604, 0.1656, -0.0823],
[ 2.1387, 1.7959, 1.5275],
[ 2.2427, -0.3100, -0.4826]])
2.索引操作:(类似于numpy)
需要注意的是:索引出来的结果与原数据共享内存,修改一个,另一个会跟着修改。如果不想修改,可以考虑使用copy()等方法
import torch
x = torch.rand(4,3)
# 取第二列
print(x[:, 1])
tensor([-0.0720, 0.0666, 1.0336, -0.6965])
y = x[0,:]
y += 1
print(y)
print(x[0, :]) # 源tensor也被改了了
tensor([3.7311, 0.9280, 1.2497])
tensor([3.7311, 0.9280, 1.2497])
3.维度变换 张量的维度变换常见的方法有torch.view()和torch.reshape(),下面我们将介绍第一中方法torch.view():
x = torch.randn(4, 4)
y = x.view(16)
z = x.view(-1, 8) # -1是指这一维的维数由其他维度决定
print(x.size(), y.size(), z.size())
torch.Size([4, 4]) torch.Size([16]) torch.Size([2, 8])
注: torch.view()返回的新tensor与源tensor共享内存(其实是同一个tensor),更改其中的一个,另外一个也会跟着改变。(顾名思义,view()仅仅是改变了对这个张量的观察角度)
x += 1
print(x)
print(y) # 也加了了1
tensor([[ 1.3019, 0.3762, 1.2397, 1.3998],
[ 0.6891, 1.3651, 1.1891, -0.6744],
[ 0.3490, 1.8377, 1.6456, 0.8403],
[-0.8259, 2.5454, 1.2474, 0.7884]])
tensor([ 1.3019, 0.3762, 1.2397, 1.3998, 0.6891, 1.3651, 1.1891, -0.6744,
0.3490, 1.8377, 1.6456, 0.8403, -0.8259, 2.5454, 1.2474, 0.7884])
上面我们说过torch.view()会改变原始张量,但是很多情况下,我们希望原始张量和变换后的张量互相不影响。为为了使创建的张量和原始张量不共享内存,我们需要使用第二种方法torch.reshape(), 同样可以改变张量的形状,但是此函数并不能保证返回的是其拷贝值,所以官方不推荐使用。推荐的方法是我们先用clone()创造一个张量副本然后再使用torch.view()进行函数维度变换 。
注:使用clone()还有一个好处是会被记录在计算图中,即梯度回传到副本时也会传到源 Tensor 。
4. 取值操作 如果我们有一个元素tensor,我们可以使用.item()来获得这个value,而不获得其他性质:
import torch
x = torch.randn(1)
print(type(x))
print(type(x.item()))
<class 'torch.Tensor'>
<class 'float'>
PyTorch中的 Tensor 支持超过一百种操作,包括转置、索引、切片、数学运算、线性代数、随机数等等,具体使用方法可参考官方文档。
广播机制
当对两个形状不同的 Tensor 按元素运算时,可能会触发广播(broadcasting)机制:先适当复制元素使这两个 Tensor 形状相同后再按元素运算。
x = torch.arange(1, 3).view(1, 2)
print(x)
y = torch.arange(1, 4).view(3, 1)
print(y)
print(x + y)
tensor([[1, 2]])
tensor([[1],
[2],
[3]])
tensor([[2, 3],
[3, 4],
[4, 5]])
2.自动求导
Autograd简介
torch.Tensor是这个包的核心类。如果设置它的属性.requires_grad为True,那么它将会追踪对于该张量的所有操作。当完成计算后可以通过调用.backward(),来自动计算所有的梯度。这个张量的所有梯度将会自动累加到.grad属性。
注意:在y.backward()时,如果y是标量,则不需要为backward()传入任何参数;否则,需要传入一个与y同形的Tensor。
要阻止一个张量被跟踪历史,可以调用.detach()方法将其与计算历史分离,并阻止它未来的计算记录被跟踪。为了防止跟踪历史记录(和使用内存),可以将代码块包装在 with torch.no_grad(): 中。在评估模型时特别有用,因为模型可能具有requires_grad = True 的可训练的参数,但是我们不需要在此过程中对他们进行梯度计算。
还有一个类对于autograd的实现非常重要:Function。Tensor和Function互相连接生成了一个无环图 (acyclic graph),它编码了完整的计算历史。每个张量都有一个.grad_fn属性,该属性引用了创建Tensor自身的Function(除非这个张量是用户手动创建的,即这个张量的grad_fn是None)。下面给出的例子中,张量由用户手动创建,因此grad_fn返回结果是None。
from __future__ import print_function
import torch
x = torch.randn(3,3,requires_grad=True)
print(x.grad_fn)
None
如果需要计算导数,可以在Tensor上调用 .backward()。如果Tensor是一个标量(即它包含一个元素的数据),则不需要为 backward()指定任何参数,但是如果它有更多的元素,则需要指定一个gradient参数,该参数是形状匹配的张量。
创建一个张量并设置requires_grad=True用来追踪其计算历史:
x = torch.ones(2, 2, requires_grad=True)
print(x)
tensor([[1., 1.],
[1., 1.]], requires_grad=True)
对这个张量做一次运算:
y = x**2
print(y)
tensor([[1., 1.],
[1., 1.]], grad_fn=<PowBackward0>)
y是计算的结果,所以它有grad_fn属性。
print(y.grad_fn)
<PowBackward0 object at 0x000001CB45988C70>
对 y 进行更多操作
z = y * y * 3
out = z.mean()
print(z, out)
tensor([[3., 3.],
[3., 3.]], grad_fn=<MulBackward0>) tensor(3., grad_fn=<MeanBackward0>)
.requires_grad_(...)原地改变了现有张量的requires_grad标志。如果没有指定的话,默认输入的这个标志是False。
a = torch.randn(2, 2) # 缺失情况下默认 requires_grad = False
a = ((a * 3) / (a - 1))
print(a.requires_grad)
a.requires_grad_(True)
print(a.requires_grad)
b = (a * a).sum()
print(b.grad_fn)
False
True
<SumBackward0 object at 0x000001CB4A19FB50>
梯度
现在开始进行反向传播,因为out是一个标量,因此out.backward()和out.backward(torch.tensor(1.))等价。
out.backward()
输出导数d(out)/dx
print(x.grad)
tensor([[3., 3.],
[3., 3.]])
数学上,若有向量函数 y ⃗ = f ( x ⃗ ) \vec{y}=f(\vec{x}) y=f(x),那么 y ⃗ \vec{y} y 关于 x ⃗ \vec{x} x 的梯度就是一个雅可比矩阵:
J = ( ∂ y 1 ∂ x 1 ⋯ ∂ y 1 ∂ x n ⋮ ⋱ ⋮ ∂ y m ∂ x 1 ⋯ ∂ y m ∂ x n ) J=\left(\begin{array}{ccc}\frac{\partial y_{1}}{\partial x_{1}} & \cdots & \frac{\partial y_{1}}{\partial x_{n}} \\ \vdots & \ddots & \vdots \\ \frac{\partial y_{m}}{\partial x_{1}} & \cdots & \frac{\partial y_{m}}{\partial x_{n}}\end{array}\right) J=⎝⎜⎛∂x1∂y1⋮∂x1∂ym⋯⋱⋯∂xn∂y1⋮∂xn∂ym⎠⎟⎞
而 torch.autograd 这个包就是用来计算一些雅可比矩阵的乘积的。例如,如果 v v v 是一个标量函数 l = g ( y ⃗ ) l = g(\vec{y}) l=g(y) 的梯度:
v = ( ∂ l ∂ y 1 ⋯ ∂ l ∂ y m ) v=\left(\begin{array}{lll}\frac{\partial l}{\partial y_{1}} & \cdots & \frac{\partial l}{\partial y_{m}}\end{array}\right) v=(∂y1∂l⋯∂ym∂l)
由链式法则,我们可以得到:
v J = ( ∂ l ∂ y 1 ⋯ ∂ l ∂ y m ) ( ∂ y 1 ∂ x 1 ⋯ ∂ y 1 ∂ x n ⋮ ⋱ ⋮ ∂ y m ∂ x 1 ⋯ ∂ y m ∂ x n ) = ( ∂ l ∂ x 1 ⋯ ∂ l ∂ x n ) v J=\left(\begin{array}{lll}\frac{\partial l}{\partial y_{1}} & \cdots & \frac{\partial l}{\partial y_{m}}\end{array}\right)\left(\begin{array}{ccc}\frac{\partial y_{1}}{\partial x_{1}} & \cdots & \frac{\partial y_{1}}{\partial x_{n}} \\ \vdots & \ddots & \vdots \\ \frac{\partial y_{m}}{\partial x_{1}} & \cdots & \frac{\partial y_{m}}{\partial x_{n}}\end{array}\right)=\left(\begin{array}{lll}\frac{\partial l}{\partial x_{1}} & \cdots & \frac{\partial l}{\partial x_{n}}\end{array}\right) vJ=(∂y1∂l⋯∂ym∂l)⎝⎜⎛∂x1∂y1⋮∂x1∂ym⋯⋱⋯∂xn∂y1⋮∂xn∂ym⎠⎟⎞=(∂x1∂l⋯∂xn∂l)
grad在反向传播过程中是累加的(accumulated),这意味着每一次运行反向传播,梯度都会累加之前的梯度,所以一般在反向传播之前需把梯度清零。
# 再来反向传播⼀一次,注意grad是累加的
out2 = x.sum()
out2.backward()
print(x.grad)
out3 = x.sum()
x.grad.data.zero_()
out3.backward()
print(x.grad)
tensor([[4., 4.],
[4., 4.]])
tensor([[1., 1.],
[1., 1.]])
现在我们来看一个雅可比向量积的例子:
x = torch.randn(3, requires_grad=True)
print(x)
y = x * 2
i = 0
while y.data.norm() < 1000:
y = y * 2
i = i + 1
print(y)
print(i)
tensor([-1.8979, -0.1852, -0.1072], requires_grad=True)
tensor([-1943.4286, -189.6687, -109.8237], grad_fn=<MulBackward0>)
9
v = torch.tensor([1, 1, 1], dtype=torch.float)
y.backward(v)
print(x.grad)
tensor([1024., 1024., 1024.])
也可以通过将代码块包装在with torch.no_grad(): 中,来阻止 autograd 跟踪设置了.requires_grad=True的张量的历史记录。
print(x.requires_grad)
print((x ** 2).requires_grad)
with torch.no_grad():
print((x ** 2).requires_grad)
True
True
False
如果我们想要修改tensor的数值,但是又不希望被autograd记录(即不会影响反向传播), 那么我们可以对tensor.data进行操作。
x = torch.ones(1,requires_grad=True)
print(x.data) # 还是一个tensor
print(x.data.requires_grad) # 但是已经是独立于计算图之外
y = 2 * x
x.data *= 100 # 只改变了值,不会记录在计算图,所以不会影响梯度传播
y.backward()
print(x) # 更改data的值也会影响tensor的值
print(x.grad)
tensor([1.])
False
tensor([100.], requires_grad=True)
tensor([2.])
3.并行计算简介
在编写程序中,当我们使用了cuda()时,其功能是让我们的模型或者数据从CPU迁移到GPU(0)当中,通过GPU开始计算。
#设置在文件最开始部分
import os
os.environ["CUDA_VISIBLE_DEVICE"] = "2" # 设置默认的显卡
CUDA_VISBLE_DEVICE=0,1 python train.py # 使用0,1两块GPU
网络结构分布到不同的设备中(Network partitioning)
在刚开始做模型并行的时候,这个方案使用的比较多。其中主要的思路是,将一个模型的各个部分拆分,然后将不同的部分放入到GPU来做不同任务的计算。其架构如下:
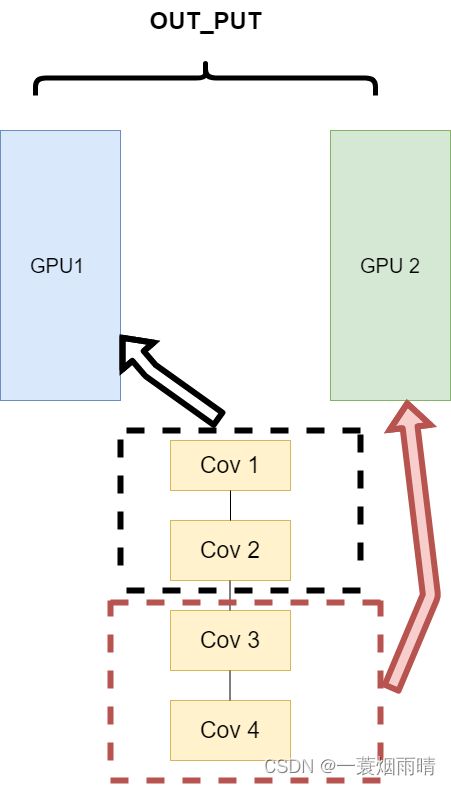
这里遇到的问题就是,不同模型组件在不同的GPU上时,GPU之间的传输就很重要,对于GPU之间的通信是一个考验。但是GPU的通信在这种密集任务中很难办到,所以这个方式慢慢淡出了视野。
同一层的任务分布到不同数据中(Layer-wise partitioning)
第二种方式就是,同一层的模型做一个拆分,让不同的GPU去训练同一层模型的部分任务。其架构如下:

这样可以保证在不同组件之间传输的问题,但是在我们需要大量的训练,同步任务加重的情况下,会出现和第一种方式一样的问题。
不同的数据分布到不同的设备中,执行相同的任务(Data parallelism)
第三种方式有点不一样,它的逻辑是,我不再拆分模型,我训练的时候模型都是一整个模型。但是我将输入的数据拆分。所谓的拆分数据就是,同一个模型在不同GPU中训练一部分数据,然后再分别计算一部分数据之后,只需要将输出的数据做一个汇总,然后再反传。其架构如下:

这种方式可以解决之前模式遇到的通讯问题。现在的主流方式是数据并行的方式(Data parallelism)