- RKNN-Toolkit 开源项目教程
彭宏彬
RKNN-Toolkit开源项目教程rknn-toolkit项目地址:https://gitcode.com/gh_mirrors/rk/rknn-toolkit1.项目介绍RKNN-Toolkit是一款由Rockchip开发的软件工具包,旨在为开发者提供模型转换、推理以及性能评估等功能,支持在PC和RockchipNPU平台(包括RK1808/RK1806/RK3399Pro/RV1109/RV
- 终篇:RK1808在BuildRoot中增加ROS支持
Cubar
rk1808ROSLinuxROSc++rockchipskineticrk1808
前两篇文章中,其实已经把ROS运行起来了,跑了官方的程序(原来出现的source问题,已经在第二篇评论出了解决方案)只是官方程序是放在整个sdk中编译的,需要写Config.in文件,mk文件等,比较麻烦,于是就在折腾直接使用交叉编译链,使用catkin_make命令来实现编译,然后把devel的文件夹传到RK1808中就可以直接运行的方法,经过几天的折腾,终于搞成功了,在此记录一下。开发环境使用
- rk1808交叉编译opencv_ubuntu16.04交叉编译opencv 移植到rk1808上
weixin_39805906
环境+工具:编译器:aarch64-linux-gnu-g++aarch64-linux-gnu-gcc虚拟机:ubuntu16.04cmake-guicd/usr/localsudomkdiropencv将源码opencv3.4.3拷贝到此目录下,并新建两个opencv_config,opencv-arm-install文件夹,cmake-gui点击configureNext如下图填写,comp
- rk1808 调试-mipi_dsi_probe
河边一枝花
debug数据结构链表
0、背景在调试LCD驱动时,查看内核打印信息发现“failedtogetmipidphy”定位到是dw_mipi_dsi_probe函数中出了问题;进一步添加打印信息可以定位到问题出现在在函数devm_phy_optional_get中:该函数返回了个错误值,在IS_ERR中报错;1、devm_phy_optional_get该函数的功能是查找并返回一个phy;dev:请求该phy的设备;stri
- 瑞芯微rk3588部署yolov5模型实战
Silver__Wolf
目标检测YOLO人工智能嵌入式硬件
瑞芯微rk3588部署yolov5模型实战模型转换通过pt模型转换为onnx模型通过onnx模型转换为rknn模型模型部署编译推送执行文件到板子运行(单图测试)多图测试模型转换 使用此yolov5仓库获取yolov5代码以及模型通过pt模型转换为onnx模型pythonexport.py--rknpurk3588--weightyolov5s.pt rk_platform支持rk1808、rv
- 人工智能计算棒 只有U盘那么大
广问AI
广问AI新闻社近期,福州瑞芯微电子股份有限公司面向AI人工智能平台及产品开发者推出了AI人工智能计算棒(AIComputeStick)。广问AI新闻社讯:人工智能计算棒只有U盘那么大这是一款基于RK1808芯片、具备人工智能编程及深度学习能力的设备。值得一提的是,这款设备体积小巧,和一个U盘大小相当。基于USB3.0TypeA接口,采用无风扇设计,利用USB供电,使用时无需连接云端,即可为开发主机
- YOLO-V5分类实战系列 —— 调优自己的数据集+RK1808部署
X_Imagine
#YOLO-V5分类实战yolov5-cls分类网络RK1808部署项目实战
YOLO-V5分类实战系列——调优自己的数据集1、保存训练和测试图片2、数据归一化3、数据增强3.1、数据增强库:albumentations3.2、数据增强库:torchvision4、ONNXCPU推理4.1、Pt模型转为ONNX4.2、ONNX推理验证4.3、ONNXCPU推理(C++)5、RK1808部署5.1、查看模型输入、输出名字5.2、转换为RKNN模型5.3、C++芯片部署6、调优
- 测评分享丨RK3399+RK1808人工智能计算棒(主动模式和被动模式)
飞凌嵌入式
嵌入式硬件
高效赋能AIoT生态链:本教程以飞凌嵌入式RK3399平台为例,讲述主动模式和被动模式的人工智能计算棒部署流程。硬件平台平台:OK3399-C开发板系统:Desktop模块:TB-RK1808S0环境准备:飞凌OK3399-C开发板,RK1808人工智能计算棒(固件版本为V1.3.4),usb摄像头,摄像头和计算棒都插入OK3399-C开发板。使用lsusb命令查看,如下(红框部分2207:001
- rknn(rknpu)使用笔记
yuanlulu
嵌入式深度学习人工智能深度学习
rknn如何转换模型对于不同的芯片,需要不同的工具:RKNN-Toolkit1v1.7.1(forRK3399pro/RK1808/RV1126/RV1109)工具:https://github.com/rockchip-linux/rknn-toolkitRKNN-Toolkit2v1.3(forRK356x/RK3588/RV1106)工具:https://github.com/rockchi
- 20221227:Rockchip实战1-跑通官方模型转换
微风❤水墨
AI-嵌入式-部署linux运维服务器
本文核心内容:1:介绍如何通过docker安装RK工具链2:以RV1106为例说明PC模型仿真转换和板载模型转换前提介绍说明:Tips:Rockchip(瑞芯微)不同芯片对应的NPU和toolkit是不同的,下载时需注意区分!平台RK1808/RK1806RV1109/RV1126RKNPU:本工程主要为RockchipNPU提供驱动、示例等。下载地址:GitHub-rockchip-linux/
- 关于yolov5模型转换为rknn
123小星星
python后端
1.首先是版本问题由于硬件为RK1808,本次采用rknn-toolkit1.7.1进行模型转换和验证。将pt模型部署在硬件上需要使用C++编程部署,并且需要将pt模型转化为RK可接受的模型。①目前硬件环境RK仅能解析yolov55.*版本的模型,对于yolov5更新后的6.0版本,硬件并不支持。因为yolov55.*模型输出形式为三组数据,而yolov56.*输出为一组数据。(个人觉得是后期数据
- yolov5转换为rknn模型过程中的问题总结
123小星星
pythonpytorchandroid
问题1、出现该问题说明你并未连接rk1808或者未给出rk1808的ID;如果你是在rknn模拟rk1808环境下进行测试,则需要将代码中的相应语句进行修改:ret=rknn.init_runtime()#模拟rk1808环境下进行测试ret=rknn.init_runtime('rk1808',device_id='1808')#连接rk1808进行测试问题2、rknn中不支持pytorch+G
- rv1126 android,RV1126_RV1109 Rock-X 使用说明
三水蜀黍
rv1126android
一、简介Rock-XSDK是基于RK3399Pro/RK180X等平台的一套AI组件库。开发者通过Rock-XSDK提供的API接口能够快速构建AI应用。Rock-XSDK当前支持Python/C编程语言,支持运行于RK3399ProAndroid/Linux平台、RK180XLinux平台以及PCLinux/MacOS/Windows(需要接RK1808计算棒)。本文测试基于RV1109或RV1
- 基于rk3399pro的人工智能模型落地与服务器部署
IEEEagent RL
笔记python深度学习人工智能机器学习
大致流程:数据获取–>模型搭建–>CPU训练模型–>模型转换–>嵌入式部署–>完成落地硬件需求:瑞芯微嵌入式开发板rk3399pro(搭载双核Cortex-A72及四核Cortex-A53组合架构处理器,四核GPU一块,以及最重要的NPU神经计算单元:内置算力3.0T)键盘、鼠标、电源USB摄像头一块有条件可以搭载RK1808算力棒系统需求Python3.6以上版本上位机搭建rknn.tookli
- rk1808交叉编译opencv_测评分享丨RK3399开发板+RK1808人工智能计算棒(被动模式)...
weixin_39644915
04被动模式Rock-X测试1、使用原厂链接下载Rock-XSDK并解压,链接如下:或者使用用户资料中提供的源码,目录为:用户资料\linux\源码\被动模式\Rock-X\2、安装编译器sudoapt-getinstallcmakegccg++3、插入计算棒,等待上位机识别到计算棒4、上位机运行rock-x依赖rknn_api,npu_transfer_proxy用户可以先按照本文档第三章“被动
- 【RK3399+RK1808】NPU算力集成
暴走的阿Sai
ARM嵌入式开发人工智能
通过RK3399与多个RK1808核心板组合成超高算力的AI集群,同时进行AI运算处理。NPU算力集成不仅能增加算力,更能灵活的控制成本,具有更高的性价比。配置AI专用芯片RK1808,RK1808内置的NPU算力最高可达3.0TOPs,支持INT8/INT16/FP16混合运算,最大程度兼顾性能、功耗及运算精度,支持TensorFlow、Caffe、ONNX、Darknet等框架的网络模型转换。
- rknn-toolkit环境搭建
双月鸟之roc
AIRKNN神经网络
一、rknn-toolkit是什么最近在评估rk1808运算性能,使用rk1808npu必须将模型转化rockchip自己的模型rknn模型文件,rknn-toolkit是rockchip官方提供的工具包。工具包的主要用途如下:RKNN-Toolkit开发套件提供了模型转换、推理运行和性能评估等几大功能,其还为我们提供了python调用的例程。我们可以通过rknn-toolkit通过提供的pyth
- pip版本低无法升级问题
双月鸟之roc
AIRKNN神经网络
最近项目需要,在研究rk1808的开发环境,搭建环境的时候遇到了pip版本低无法安装好多软件,异常如下:sudopipinstall--upgradepipThedirectory'/home/roc/.cache/pip/http'oritsparentdirectoryisnotownedbythecurrentuserandthecachehasbeendisabled.Pleasechec
- RK1808交叉编译opencv with ffmpeg(解决FFMPEG始终为NO)
jbjhzstsl
嵌入式交叉编译
RK1808交叉编译opencvwithffmpeg(解决FFMPEG始终为NO)环境与源码包一、交叉编译是什么?二、使用步骤1.交叉编译zlib2.libx264的交叉编译3.libxvid交叉编译4.ffmpeg交叉编译4.opencv交叉编译总结环境与源码包宿主机:Ubuntu16.04x86目标平台:RP-RK1808,aarch64交叉编译工具链:gcc-linaro-6.3.1-201
- NPU算力集成解决方案
ccsubs
边缘计算人工智能
firefly推出了RK3399+1808的解决方案,方案简介:NPU算力集成解决方案,通过RK3399与多个RK1808核心板组合成超高算力的AI集群,同时进行AI运算处理。NPU算力集成解决方案不仅能增加算力,更能灵活的控制成本,具有更高的性价比。首先我们了解一下,RK3399的零售价大概在1000RMB,1808核心板的零售价大概在400RMB。演示的demo是通过1个RK3399作为主板,
- rk1808交叉编译opencv_测评分享丨RK3399开发板+RK1808人工智能计算棒(主动模式)...
weixin_39730284
高效赋能AIoT生态链:本教程以飞凌嵌入式RK3399平台为例,讲述主动模式的人工智能计算棒部署流程。01硬件平台平台:OK3399-C开发板系统:Desktop模块:TB-RK1808S0环境准备:飞凌OK3399-C开发板,RK1808人工智能计算棒(固件版本为V1.3.4),usb摄像头,摄像头和计算棒都插入OK3399-C开发板。使用lsusb命令查看,如下(红框部分2207:0018即为
- 测评分享丨RK3399开发板+RK1808人工智能计算棒(主动模式)
燕小飞
干货分享人工智能RK3399
一、硬件平台平台:OK3399-C系统:Desktop模块:TB-RK1808S0环境准备:飞凌RK系列RK3399-C开发板,rk1808人工智能计算棒(固件版本为V1.3.4),usb摄像头,摄像头和计算棒都插入RK3399-C开发板。使用lsusb命令查看,如下(红框部分2207:0018即为RK1808人工智能计算棒):输入命令如下:RK3399-C开发板+RK1808人工智能计算棒二、概
- 主流边缘端部署嵌入式平台
EasonChanz
机器学习nvidia树莓派RK1808边缘端部署嵌入式平台深度学习
主流边缘端部署嵌入式平台文章目录引言RK1808RK1808人工智能计算棒RK1808芯片架构优势极致低功耗强大AI运算能力面向AIoT应用的丰富接口易于开发RK1808具体的规格信息RK1808测评NVIDAJetsonNano、tx1/2、Xavier测评规格参数优势树莓派3/4测评规格参数总结引言AIoT开启了继物联网、人工智能后又一大想象无限的领域,同时也给智慧物联、人工智能在应用层面拓展
- ZLG M1808开发板使用
RunningJiang
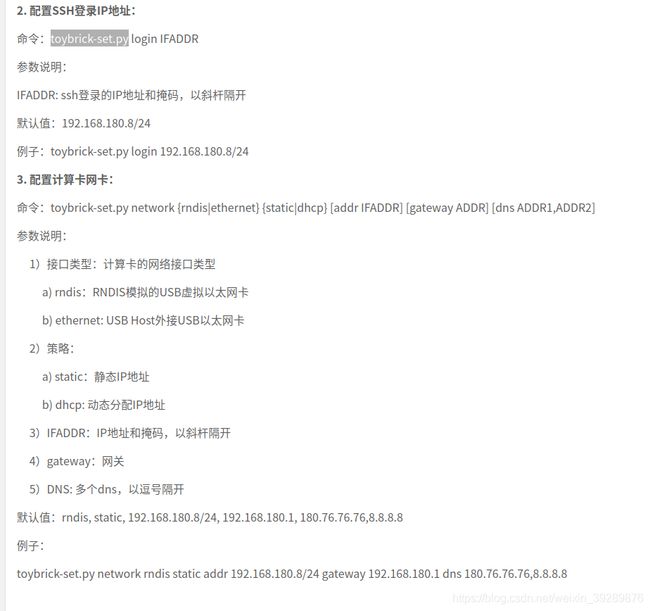
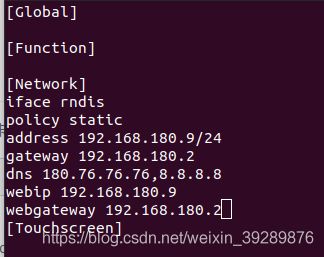
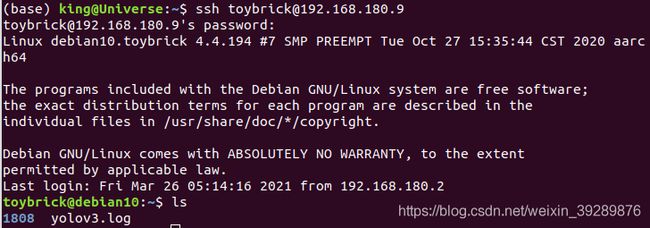
项目中需要使用工业级的AI处理板,因此考虑采用ZLG的基于rk1808平台的开发板。详细的文档介绍可以看这里M1808文档地址准备阶段设置PC的固定地址和M1808处于同一网段通过ssh连接到M1808开发板ip:192.168.1.136用户名:root密码:root测试用例配置rknn模型转换环境参看了ZLG官网给出的教程,个人猜测应该就是rknn标准的toolkit安装方式,因此我没有按照他
- RV1126_RV1109 Rock-X 使用说明
Mr_Michael
一、简介Rock-XSDK是基于RK3399Pro/RK180X等平台的一套AI组件库。开发者通过Rock-XSDK提供的API接口能够快速构建AI应用。Rock-XSDK当前支持Python/C编程语言,支持运行于RK3399ProAndroid/Linux平台、RK180XLinux平台以及PCLinux/MacOS/Windows(需要接RK1808计算棒)。本文测试基于RV1109或RV1
- 测评分享丨飞凌嵌入式OK3399-C开发板+RK1808人工智能计算棒(主动模式)
ningmengzier
网络linux神经网络服务器
一、硬件平台平台:OK3399-C系统:Desktop模块:TB-RK1808S0环境准备:飞凌OK3399-C开发板,rk1808人工智能计算棒(固件版本为V1.3.4),usb摄像头,摄像头和计算棒都插入OK3399-C开发板。使用lsusb命令查看,如下(红框部分2207:0018即为RK1808人工智能计算棒):输入命令如下:二、概述AI计算区分为四个不同的象限,分别是云端训练、云端推理,
- RK1808 RKNN API调用流程
JoannaJuanCV
Linux
RKNNAPI调用流程:通过该API去调用NPU(神经网络计算单元):1.读取rknn模型文件(使用RKNN模型工具生成的.rknn文件)到内存2.使用rknn_init进行context初始化,加载rknn模型3.使用rknn_query获取input,output的属性4.使用rknn_input_set对inputs进行设置5.使用rknn_run进行单次推理操作6.使用rknn_outpu
- RK3399 PRO快速开发 - 车牌识别
暴走的阿Sai
ARM嵌入式开发
简介Rock-XSDK是基于RK3399Pro/RK1808平台的一套AI组件库。开发者通过Rock-XSDK提供的API接口能够快速构建AI应用。Rock-X下载地址:https://pan.baidu.com/s/1brKNqxBYDmElm-A56DLu4Q提取码:ji14Rock-XSDK主要功能类别功能目标检测人头检测、人车物检测人脸人脸关键点、人脸属性分析、人脸识别车牌车牌检测、车牌识
- 测评分享丨OK3399-C开发板+RK1808人工智能计算棒-边缘计算必备(主动模式)
ZXCZB123
rk3399;人工智能;AI;
一、硬件平台平台:OK3399-C系统:Desktop模块:TB-RK1808S0环境准备:飞凌OK3399-C开发板,rk1808人工智能计算棒(固件版本为V1.3.4),usb摄像头,摄像头和计算棒都插入OK3399-C开发板。使用lsusb命令查看,如下(红框部分2207:0018即为RK1808人工智能计算棒):输入命令如下:二、概述AI计算区分为四个不同的象限,分别是云端训练、云端推理,
- 瑞星微 AI情况简介
jack_201316888
AI
5月21日,福州瑞芯微电子Rockchip(以下简称瑞芯微)宣布旗下AI平台重大升级,正式面向全球AI开发者发布三大开发套件:AI开发工具包RKNN-Toolkit、AISDK软件开发工具包Rock-XSDK,以及AI人工智能计算棒RK1808AIComputeStick。开发工具包与软件工具包主要适配于带有硬件NPU加速器的瑞芯微RK3399Pro/RK1808芯片平台,不仅能增强算力与兼容性、
- java工厂模式
3213213333332132
java抽象工厂
工厂模式有
1、工厂方法
2、抽象工厂方法。
下面我的实现是抽象工厂方法,
给所有具体的产品类定一个通用的接口。
package 工厂模式;
/**
* 航天飞行接口
*
* @Description
* @author FuJianyong
* 2015-7-14下午02:42:05
*/
public interface SpaceF
- nginx频率限制+python测试
ronin47
nginx 频率 python
部分内容参考:http://www.abc3210.com/2013/web_04/82.shtml
首先说一下遇到这个问题是因为网站被攻击,阿里云报警,想到要限制一下访问频率,而不是限制ip(限制ip的方案稍后给出)。nginx连接资源被吃空返回状态码是502,添加本方案限制后返回599,与正常状态码区别开。步骤如下:
- java线程和线程池的使用
dyy_gusi
ThreadPoolthreadRunnabletimer
java线程和线程池
一、创建多线程的方式
java多线程很常见,如何使用多线程,如何创建线程,java中有两种方式,第一种是让自己的类实现Runnable接口,第二种是让自己的类继承Thread类。其实Thread类自己也是实现了Runnable接口。具体使用实例如下:
1、通过实现Runnable接口方式 1 2
- Linux
171815164
linux
ubuntu kernel
http://kernel.ubuntu.com/~kernel-ppa/mainline/v4.1.2-unstable/
安卓sdk代理
mirrors.neusoft.edu.cn 80
输入法和jdk
sudo apt-get install fcitx
su
- Tomcat JDBC Connection Pool
g21121
Connection
Tomcat7 抛弃了以往的DBCP 采用了新的Tomcat Jdbc Pool 作为数据库连接组件,事实上DBCP已经被Hibernate 所抛弃,因为他存在很多问题,诸如:更新缓慢,bug较多,编译问题,代码复杂等等。
Tomcat Jdbc P
- 敲代码的一点想法
永夜-极光
java随笔感想
入门学习java编程已经半年了,一路敲代码下来,现在也才1w+行代码量,也就菜鸟水准吧,但是在整个学习过程中,我一直在想,为什么很多培训老师,网上的文章都是要我们背一些代码?比如学习Arraylist的时候,教师就让我们先参考源代码写一遍,然
- jvm指令集
程序员是怎么炼成的
jvm 指令集
转自:http://blog.csdn.net/hudashi/article/details/7062675#comments
将值推送至栈顶时 const ldc push load指令
const系列
该系列命令主要负责把简单的数值类型送到栈顶。(从常量池或者局部变量push到栈顶时均使用)
0x02 &nbs
- Oracle字符集的查看查询和Oracle字符集的设置修改
aijuans
oracle
本文主要讨论以下几个部分:如何查看查询oracle字符集、 修改设置字符集以及常见的oracle utf8字符集和oracle exp 字符集问题。
一、什么是Oracle字符集
Oracle字符集是一个字节数据的解释的符号集合,有大小之分,有相互的包容关系。ORACLE 支持国家语言的体系结构允许你使用本地化语言来存储,处理,检索数据。它使数据库工具,错误消息,排序次序,日期,时间,货
- png在Ie6下透明度处理方法
antonyup_2006
css浏览器FirebugIE
由于之前到深圳现场支撑上线,当时为了解决个控件下载,我机器上的IE8老报个错,不得以把ie8卸载掉,换个Ie6,问题解决了,今天出差回来,用ie6登入另一个正在开发的系统,遇到了Png图片的问题,当然升级到ie8(ie8自带的开发人员工具调试前端页面JS之类的还是比较方便的,和FireBug一样,呵呵),这个问题就解决了,但稍微做了下这个问题的处理。
我们知道PNG是图像文件存储格式,查询资
- 表查询常用命令高级查询方法(二)
百合不是茶
oracle分页查询分组查询联合查询
----------------------------------------------------分组查询 group by having --平均工资和最高工资 select avg(sal)平均工资,max(sal) from emp ; --每个部门的平均工资和最高工资
- uploadify3.1版本参数使用详解
bijian1013
JavaScriptuploadify3.1
使用:
绑定的界面元素<input id='gallery'type='file'/>$("#gallery").uploadify({设置参数,参数如下});
设置的属性:
id: jQuery(this).attr('id'),//绑定的input的ID
langFile: 'http://ww
- 精通Oracle10编程SQL(17)使用ORACLE系统包
bijian1013
oracle数据库plsql
/*
*使用ORACLE系统包
*/
--1.DBMS_OUTPUT
--ENABLE:用于激活过程PUT,PUT_LINE,NEW_LINE,GET_LINE和GET_LINES的调用
--语法:DBMS_OUTPUT.enable(buffer_size in integer default 20000);
--DISABLE:用于禁止对过程PUT,PUT_LINE,NEW
- 【JVM一】JVM垃圾回收日志
bit1129
垃圾回收
将JVM垃圾回收的日志记录下来,对于分析垃圾回收的运行状态,进而调整内存分配(年轻代,老年代,永久代的内存分配)等是很有意义的。JVM与垃圾回收日志相关的参数包括:
-XX:+PrintGC
-XX:+PrintGCDetails
-XX:+PrintGCTimeStamps
-XX:+PrintGCDateStamps
-Xloggc
-XX:+PrintGC
通
- Toast使用
白糖_
toast
Android中的Toast是一种简易的消息提示框,toast提示框不能被用户点击,toast会根据用户设置的显示时间后自动消失。
创建Toast
两个方法创建Toast
makeText(Context context, int resId, int duration)
参数:context是toast显示在
- angular.identity
boyitech
AngularJSAngularJS API
angular.identiy 描述: 返回它第一参数的函数. 此函数多用于函数是编程. 使用方法: angular.identity(value); 参数详解: Param Type Details value
*
to be returned. 返回值: 传入的value 实例代码:
<!DOCTYPE HTML>
- java-两整数相除,求循环节
bylijinnan
java
import java.util.ArrayList;
import java.util.List;
public class CircleDigitsInDivision {
/**
* 题目:求循环节,若整除则返回NULL,否则返回char*指向循环节。先写思路。函数原型:char*get_circle_digits(unsigned k,unsigned j)
- Java 日期 周 年
Chen.H
javaC++cC#
/**
* java日期操作(月末、周末等的日期操作)
*
* @author
*
*/
public class DateUtil {
/** */
/**
* 取得某天相加(减)後的那一天
*
* @param date
* @param num
*
- [高考与专业]欢迎广大高中毕业生加入自动控制与计算机应用专业
comsci
计算机
不知道现在的高校还设置这个宽口径专业没有,自动控制与计算机应用专业,我就是这个专业毕业的,这个专业的课程非常多,既要学习自动控制方面的课程,也要学习计算机专业的课程,对数学也要求比较高.....如果有这个专业,欢迎大家报考...毕业出来之后,就业的途径非常广.....
以后
- 分层查询(Hierarchical Queries)
daizj
oracle递归查询层次查询
Hierarchical Queries
If a table contains hierarchical data, then you can select rows in a hierarchical order using the hierarchical query clause:
hierarchical_query_clause::=
start with condi
- 数据迁移
daysinsun
数据迁移
最近公司在重构一个医疗系统,原来的系统是两个.Net系统,现需要重构到java中。数据库分别为SQL Server和Mysql,现需要将数据库统一为Hana数据库,发现了几个问题,但最后通过努力都解决了。
1、原本通过Hana的数据迁移工具把数据是可以迁移过去的,在MySQl里面的字段为TEXT类型的到Hana里面就存储不了了,最后不得不更改为clob。
2、在数据插入的时候有些字段特别长
- C语言学习二进制的表示示例
dcj3sjt126com
cbasic
进制的表示示例
# include <stdio.h>
int main(void)
{
int i = 0x32C;
printf("i = %d\n", i);
/*
printf的用法
%d表示以十进制输出
%x或%X表示以十六进制的输出
%o表示以八进制输出
*/
return 0;
}
- NsTimer 和 UITableViewCell 之间的控制
dcj3sjt126com
ios
情况是这样的:
一个UITableView, 每个Cell的内容是我自定义的 viewA viewA上面有很多的动画, 我需要添加NSTimer来做动画, 由于TableView的复用机制, 我添加的动画会不断开启, 没有停止, 动画会执行越来越多.
解决办法:
在配置cell的时候开始动画, 然后在cell结束显示的时候停止动画
查找cell结束显示的代理
- MySql中case when then 的使用
fanxiaolong
casewhenthenend
select "主键", "项目编号", "项目名称","项目创建时间", "项目状态","部门名称","创建人"
union
(select
pp.id as "主键",
pp.project_number as &
- Ehcache(01)——简介、基本操作
234390216
cacheehcache简介CacheManagercrud
Ehcache简介
目录
1 CacheManager
1.1 构造方法构建
1.2 静态方法构建
2 Cache
2.1&
- 最容易懂的javascript闭包学习入门
jackyrong
JavaScript
http://www.ruanyifeng.com/blog/2009/08/learning_javascript_closures.html
闭包(closure)是Javascript语言的一个难点,也是它的特色,很多高级应用都要依靠闭包实现。
下面就是我的学习笔记,对于Javascript初学者应该是很有用的。
一、变量的作用域
要理解闭包,首先必须理解Javascript特殊
- 提升网站转化率的四步优化方案
php教程分享
数据结构PHP数据挖掘Google活动
网站开发完成后,我们在进行网站优化最关键的问题就是如何提高整体的转化率,这也是营销策略里最最重要的方面之一,并且也是网站综合运营实例的结果。文中分享了四大优化策略:调查、研究、优化、评估,这四大策略可以很好地帮助用户设计出高效的优化方案。
PHP开发的网站优化一个网站最关键和棘手的是,如何提高整体的转化率,这是任何营销策略里最重要的方面之一,而提升网站转化率是网站综合运营实力的结果。今天,我就分
- web开发里什么是HTML5的WebSocket?
naruto1990
Webhtml5浏览器socket
当前火起来的HTML5语言里面,很多学者们都还没有完全了解这语言的效果情况,我最喜欢的Web开发技术就是正迅速变得流行的 WebSocket API。WebSocket 提供了一个受欢迎的技术,以替代我们过去几年一直在用的Ajax技术。这个新的API提供了一个方法,从客户端使用简单的语法有效地推动消息到服务器。让我们看一看6个HTML5教程介绍里 的 WebSocket API:它可用于客户端、服
- Socket初步编程——简单实现群聊
Everyday都不同
socket网络编程初步认识
初次接触到socket网络编程,也参考了网络上众前辈的文章。尝试自己也写了一下,记录下过程吧:
服务端:(接收客户端消息并把它们打印出来)
public class SocketServer {
private List<Socket> socketList = new ArrayList<Socket>();
public s
- 面试:Hashtable与HashMap的区别(结合线程)
toknowme
昨天去了某钱公司面试,面试过程中被问道
Hashtable与HashMap的区别?当时就是回答了一点,Hashtable是线程安全的,HashMap是线程不安全的,说白了,就是Hashtable是的同步的,HashMap不是同步的,需要额外的处理一下。
今天就动手写了一个例子,直接看代码吧
package com.learn.lesson001;
import java
- MVC设计模式的总结
xp9802
设计模式mvc框架IOC
随着Web应用的商业逻辑包含逐渐复杂的公式分析计算、决策支持等,使客户机越
来越不堪重负,因此将系统的商业分离出来。单独形成一部分,这样三层结构产生了。
其中‘层’是逻辑上的划分。
三层体系结构是将整个系统划分为如图2.1所示的结构[3]
(1)表现层(Presentation layer):包含表示代码、用户交互GUI、数据验证。
该层用于向客户端用户提供GUI交互,它允许用户