自动驾驶 NVIDIA Drive PX2架构
文章目录
-
- 前言
- NVIDIA Drive PX2
- PCIe Switch PEX8724
- PCIe-10GbE Intel X550-AT
- GMSL Camera
- GMSL Display
- FPDLink Display
- FT4232
- USB82514
- Marvell 88E6321
- AURIX TC297
- 48Pin线
- 微信公众号
前言
Nvidia Drive是Nvidia的计算机平台,旨在提供由深度学习提供动力的自动驾驶汽车和驾驶员辅助功能。这一系列的产品演进对比如下图(出自 https://en.wikipedia.org/wiki/Nvidia_Drive)

本节把DRIVE PX 2拎出来, 看看架构.
NVIDIA Drive PX2
NVIDIA Drive PX2 AutoChauffeur实物如图所示:

DRIVER PX2实物如图所示:

板子架构在 DRIVE PX 2 HANDS-ON 中明确给了出来.

不管驱动/软件给不给力, 不管芯片资料是不是要签NDA(Non Disclosure Agreement), 不管价格如何, 这个硬件架构确实让人眼前一亮, 比如这个PCIe Switch, PCIe-10GbE, DSI到LVDS再到FPDLink III, HDMI到GMSL…
PCIe Switch PEX8724
PEX8724, PCIe Gen 3 Switch, 24 Lanes, 6 Ports. 在DRIVE PX 2中用了20-lane, 4个PCIe口连接两对Tegra和dGPU, 还有一个扩出了10GbE口, 应该是5 x4吧:

PCIe-10GbE Intel X550-AT
Intel X550-AT, PCIe v3.0 (8.0 GT/s), PCIe v3.0 (8.0 GT/s), 0°C to 55°C.
位置如图:

GMSL Camera
参考, 先来看环视相机, 一一对应的串行器和解串器MAX9271和MAX9240, MAX9277和MAX9288:

有一就有四, 四合一的MAX9286还是很香的:

DRIVER PX2的12路GMSL摄像头应该是用了3片美信的MAX9286? 然后通过CSI接口搞到Tegra上.
MAX9286官网, 需签署NDA拿资料, 有渠道也好.
GMSL Display
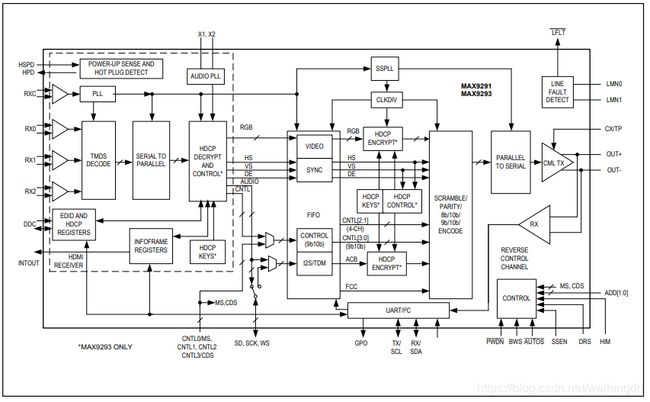
串行再解串不仅在相机里香, 在显示上也是如此. 两个Tegra的HDMI通过MUX二选一芯片(没有明说型号)怼到MAX9291上, 就成了GMSL Display.
MAX9291官网, 数据资料可以直接撸下来, 3.12Gbps GMSL串行器,用于同轴或STP输出及 HDMI输入, 功能框图:
FPDLink Display
依然是串行解串的狂欢, 两个Tegra的DSI通过MUX芯片 FSA644, 然后经过DSI-LVDS Bridge, 片子应该是TI的SN65DSI85, 再到DS90UB947(1080p 双路 FPD-Link III 串行器).
先来看下FSA644, 2:1 MIPI D-PHY (1.5Gbps) 4-Data Lane Switch, 可以简单的当成10通道的单刀双掷开关:

再来看下SN65DSI85:
SN65DSI85 DSI 转 FlatLink 桥 具有 一个双通道 MIPI D-PHY 接收器前端配置,此配置中在每个通道上具有 4 条信道,每条信道的运行速率为 1Gbps,最大输入带宽为 8Gbps。该桥接器可解码 MIPI DSI 18bpp RGB666 和 24bpp RGB888 视频流,并将格式化视频数据流转换为 FlatLink 兼容的 LVDS 输出(像素时钟范围为 25MHz 至 154MHz),从而提供一个双链路 LVDS、单链路 LVDS 或两个单链路 LVDS 接口(每个链路具有 4 个数据信道)。
SN65DSI85 非常适用于每秒 60 帧的 WQXGA (2560 × 1600),以及等效 120fps(高达 24 bpp)的 WUXGA 3D 图形和全高清 (1920x1080) 分辨率。该器件实现了部分线路缓冲以适应 DSI 与 LVDS 接口间的数据流不匹配的情况。
最后是DS90UB947:
DS90UB947-Q1 是一款 OpenLDI 到 FPD-Link III 桥接器件,与 FPD-Link IIIDS90UB940-Q1/DS90UB948-Q1解串器配合使用,可通过经济高效的 50Ω 单端同轴电缆或 100Ω 差分屏蔽双绞线 (STP) 电缆提供单通道或双通道高速串行流。它对 OpenLDI 输入进行串行化处理,支持高达 WUXGA 和 1080p60 的视频分辨率(24 位色深)。
FPD-Link III 接口支持通过同一条差分链路进行视频和音频数据传输以及全双工控制(包括 I2C 和 SPI 通信)。通过两个差分对实现视频数据和控制的整合可减小互连线尺寸和重量,并简化系统设计。通过使用低压差分信令、数据换序和随机生成更大限度地减少了电磁干扰 (EMI)。在向后兼容模式下,该器件在单一差分链路上最高可支持 WXGA 和 720p 分辨率(24 位色深)。
DS90UB947-Q1 支持通过外部 I2S 接口接收多通道音频。该器件接收的音频数据会被加密并通过 FPD-Link III 接口发送出去,之后再由解串器重新生成。
典型应用图:

FT4232
FT4232官网, 可以USB转四串口, USB转JTAG/I2C/SPI等, 这个系列的片子不仅在DRIVE PX 2中有用到, 在后面的Xavier, 百度的SensorBox都有用到, 用处很多:

在DRIVE PX 2中连接了两个Terga的UART和GPIO, 还有单片机TC297的UART, 然后怼到USB 2.0 Hub上去了.
其实如果不用JTAG之类的, 只用USB转4串口, CP2108(https://www.silabs.com/products/interface/usb-bridges/classic-usb-bridges/device.cp2108)也算不错的选择.
USB82514
Microchip的车规级USB 2.0 Hub, 1分4, 其实商用的GL850, FE8.1之类的很常见, 但Automotive-Grade USB 2.0 High-Speed 4-Port Hub真不是太多, 值得收藏. 官网 https://www.microchip.com/wwwproducts/en/USB82514
Marvell 88E6321
[88E6321] 7端口的千兆以太网交换芯片, 7-Port AVB GE Switch, 2 GE PHYs + 3 RGMII/MII/RGMII + 2 Serdes/SGMII, 支持最新的IEEEE802.1 Audio Video Bridging标准.
DRIVE PX 2中, 88E6321的SGMII口通过PHY芯片88EA1512P怼到了Tegra的RGMII上. 这个怼法值得学习. 然后88E6321的RGMII外接PHY芯片BCM89811, 扩出了AutoLink口, 方便级联用? 两个PHY直接挂两个自带网络变压器的RJ45, MII与MCU连接.
AURIX TC297
英飞凌的单片机, CAN/LIN/FlexRay都是从这个MCU扩出来的, TC297官网:

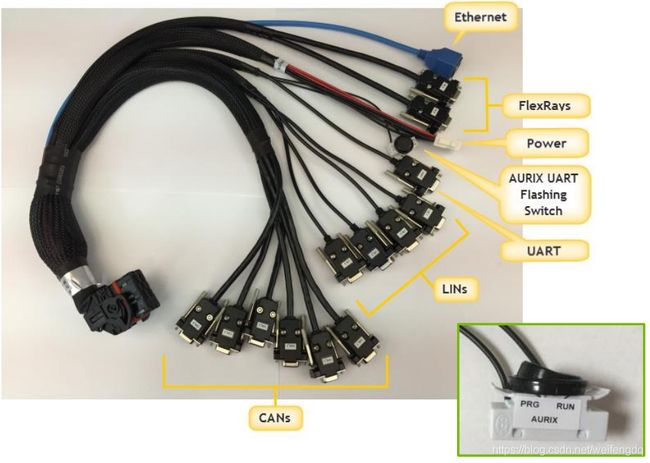
48Pin线
上篇分析应该是MOLEX的连接器 500762-0483或者 500762-0481, 对应的插头扩出了6路CAN, 3路LIN, 2路FlexRay, 应该都来自MCU, 这是说Terga的CAN毫无卵用? 还留出了母座的千兆RJ45接口? 很不错的想法, 希望不要晃晃把细细的网线晃折了.
微信公众号
欢迎扫描二维码关注本人微信公众号, 及时获取或者发送给我最新消息:
