图像分割之U2-Net介绍
图像分割之U2-Net介绍
论文:https://arxiv.org/pdf/2005.09007.pdf
代码:https://codeload.github.com/NathanUA/U-2-Net/zip/master
U2net是基于unet提出的一种新的网络结构,同样基于encode-decode,作者参考FPN,Unet,在此基础之上提出了一种新模块RSU(ReSidual U-blocks) 经过测试,对于分割物体前背景取得了惊人的效果。同样具有较好的实时性,经过测试在P100上前向时间仅为18ms(56fps)。
下面是对U2net的一个介绍:
首先还是贴一下网络结构:

其实这个网络结构以及把一整个u2net完整的表示出来了,作者提出了一种名为RSU的新模块。对于每个RSU本身就是一个小号的Unet,最后所有的RSU用一种类似FPN的结构连接在一起。类似down-top top-down。通过这种方式来增加多尺度能力。获得了极为优秀的分割结果。
下面是RSU结构:

从这个结构可以很容易的看出,所谓的RSU其实就是一个很简单的Unet
作者通过类似FPN的结构,将多个Unet输出结果进行组合。最后进行合并,得到mask,通过多个loss在不同层的表现来进行更新。取得了非常理想的效果。
下面是整个U2net代码细节的介绍:
由于这个代码写的相对比较。。嗯。写的比较清晰,所以和以往的介绍不一样,我以代码注释的形式介绍好了:
class U2NET(nn.Module):
def __init__(self,in_ch=3,out_ch=1):
super(U2NET,self).__init__()
self.stage1 = RSU7(in_ch,32,64)
#对于每一个RSU来说,本质其实就是一个Unet,多个下采样多个上采样
self.pool12 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.stage2 = RSU6(64,32,128)
self.pool23 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.stage3 = RSU5(128,64,256)
self.pool34 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.stage4 = RSU4(256,128,512)
self.pool45 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.stage5 = RSU4F(512,256,512)
self.pool56 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.stage6 = RSU4F(512,256,512)
# decoder
self.stage5d = RSU4F(1024,256,512)
self.stage4d = RSU4(1024,128,256)
self.stage3d = RSU5(512,64,128)
self.stage2d = RSU6(256,32,64)
self.stage1d = RSU7(128,16,64)
self.side1 = nn.Conv2d(64,out_ch,3,padding=1)
self.side2 = nn.Conv2d(64,out_ch,3,padding=1)
self.side3 = nn.Conv2d(128,out_ch,3,padding=1)
self.side4 = nn.Conv2d(256,out_ch,3,padding=1)
self.side5 = nn.Conv2d(512,out_ch,3,padding=1)
self.side6 = nn.Conv2d(512,out_ch,3,padding=1)
self.outconv = nn.Conv2d(6,out_ch,1)
def forward(self,x):
hx = x
#stage 1
hx1 = self.stage1(hx)
#通过一个个Unet得到相应的mask
hx = self.pool12(hx1)
#stage 2
hx2 = self.stage2(hx)
hx = self.pool23(hx2)
#stage 3
hx3 = self.stage3(hx)
hx = self.pool34(hx3)
#stage 4
hx4 = self.stage4(hx)
hx = self.pool45(hx4)
#stage 5
hx5 = self.stage5(hx)
hx = self.pool56(hx5)
#stage 6
hx6 = self.stage6(hx)
hx6up = _upsample_like(hx6,hx5)
#-------------------- decoder --------------------
hx5d = self.stage5d(torch.cat((hx6up,hx5),1))
#这里类似FPN。每个block的输出结果和上一个(下一个block)结果做融合(cat),然后输出。
hx5dup = _upsample_like(hx5d,hx4)
#由于每个block做了下采样,为了resize到原图,需要做一个上采样,这里作者直接用的双线性插值做的上采样
hx4d = self.stage4d(torch.cat((hx5dup,hx4),1))
hx4dup = _upsample_like(hx4d,hx3)
hx3d = self.stage3d(torch.cat((hx4dup,hx3),1))
hx3dup = _upsample_like(hx3d,hx2)
hx2d = self.stage2d(torch.cat((hx3dup,hx2),1))
hx2dup = _upsample_like(hx2d,hx1)
hx1d = self.stage1d(torch.cat((hx2dup,hx1),1))
#side output
d1 = self.side1(hx1d)
#这里本质就是把每一个block输出结果,转换成WxHx1的mask最后过一个sigmod就可以得到每个block输出的概率图。
d2 = self.side2(hx2d)
d2 = _upsample_like(d2,d1)
d3 = self.side3(hx3d)
d3 = _upsample_like(d3,d1)
d4 = self.side4(hx4d)
d4 = _upsample_like(d4,d1)
d5 = self.side5(hx5d)
d5 = _upsample_like(d5,d1)
d6 = self.side6(hx6)
d6 = _upsample_like(d6,d1)
d0 = self.outconv(torch.cat((d1,d2,d3,d4,d5,d6),1))
#6个blovk cat一起之后做特征融合,然后再做输出,结果就是d0的结果,其他的输出都是为了计算loss
return F.sigmoid(d0), F.sigmoid(d1), F.sigmoid(d2), F.sigmoid(d3), F.sigmoid(d4), F.sigmoid(d5), F.sigmoid(d6)
具体的对于每个RSU来说:
class RSU7(nn.Module):#UNet07DRES(nn.Module):
def __init__(self, in_ch=3, mid_ch=12, out_ch=3):
super(RSU7,self).__init__()
self.rebnconvin = REBNCONV(in_ch,out_ch,dirate=1)
self.rebnconv1 = REBNCONV(out_ch,mid_ch,dirate=1)
self.pool1 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv2 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.pool2 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv3 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.pool3 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv4 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.pool4 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv5 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.pool5 = nn.MaxPool2d(2,stride=2,ceil_mode=True)
self.rebnconv6 = REBNCONV(mid_ch,mid_ch,dirate=1)
self.rebnconv7 = REBNCONV(mid_ch,mid_ch,dirate=2)
self.rebnconv6d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv5d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv4d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv3d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv2d = REBNCONV(mid_ch*2,mid_ch,dirate=1)
self.rebnconv1d = REBNCONV(mid_ch*2,out_ch,dirate=1)
def forward(self,x):
hx = x
hxin = self.rebnconvin(hx)
hx1 = self.rebnconv1(hxin)
hx = self.pool1(hx1)
hx2 = self.rebnconv2(hx)
hx = self.pool2(hx2)
hx3 = self.rebnconv3(hx)
hx = self.pool3(hx3)
hx4 = self.rebnconv4(hx)
hx = self.pool4(hx4)
hx5 = self.rebnconv5(hx)
hx = self.pool5(hx5)
hx6 = self.rebnconv6(hx)
hx7 = self.rebnconv7(hx6)
hx6d = self.rebnconv6d(torch.cat((hx7,hx6),1))
hx6dup = _upsample_like(hx6d,hx5)
#双线性差值做的上采样
hx5d = self.rebnconv5d(torch.cat((hx6dup,hx5),1))
hx5dup = _upsample_like(hx5d,hx4)
hx4d = self.rebnconv4d(torch.cat((hx5dup,hx4),1))
hx4dup = _upsample_like(hx4d,hx3)
hx3d = self.rebnconv3d(torch.cat((hx4dup,hx3),1))
hx3dup = _upsample_like(hx3d,hx2)
hx2d = self.rebnconv2d(torch.cat((hx3dup,hx2),1))
hx2dup = _upsample_like(hx2d,hx1)
hx1d = self.rebnconv1d(torch.cat((hx2dup,hx1),1))
return hx1d + hxin
对应结构图本质其实是这样的:

RSU和ResNet的残差结构其实非常的相似。只不过将权重层换成了Unet而已。
最后我们来看下loss:
由于作者把U2net分成了多个block,每个block输出一个loss,那么最后整个模型的loss自然就是这样的

然后带了一堆的解释,本质其实就是7个loss相加(6个block输出结果加1个特征融合后的结果):
def muti_bce_loss_fusion(d0, d1, d2, d3, d4, d5, d6, labels_v):
loss0 = bce_loss(d0,labels_v)
loss1 = bce_loss(d1,labels_v)
loss2 = bce_loss(d2,labels_v)
loss3 = bce_loss(d3,labels_v)
loss4 = bce_loss(d4,labels_v)
loss5 = bce_loss(d5,labels_v)
loss6 = bce_loss(d6,labels_v)
loss = loss0 + loss1 + loss2 + loss3 + loss4 + loss5 + loss6
print("l0: %3f, l1: %3f, l2: %3f, l3: %3f, l4: %3f, l5: %3f, l6: %3f\n"%(loss0.data[0],loss1.data[0],loss2.data[0],loss3.data[0],loss4.data[0],loss5.data[0],loss6.data[0]))
return loss0, loss
#每个mask计算二值交叉熵最后相加
d0, d1, d2, d3, d4, d5, d6 = net(inputs_v)
loss2, loss = muti_bce_loss_fusion(d0, d1, d2, d3, d4, d5, d6, labels_v)
loss.backward()
optimizer.step()
可以说整个代码清晰简单好懂。但是效果确实好,我觉得好的分割检测模型就该这样,大道至简。
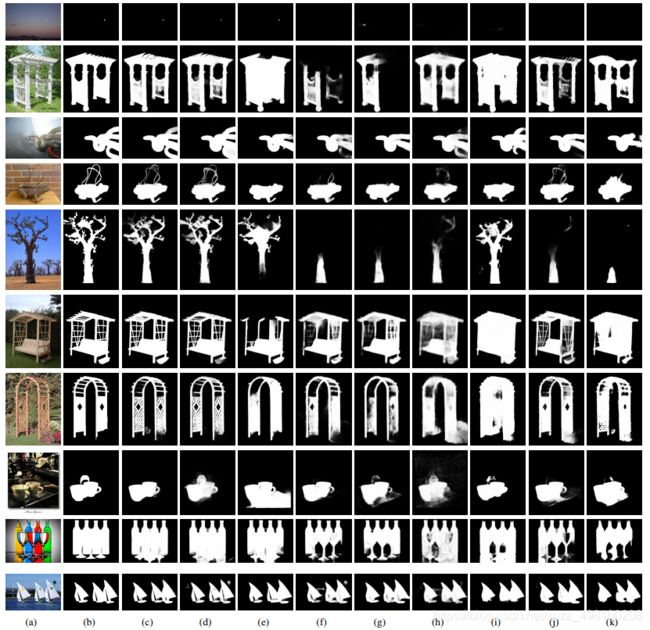
分割结果如下图所示,在我的实际使用中发现,如果只是前背景分割不涉及语义分割,在几个项目中有极为优秀的表现,即使背景很复杂,同时实时性非常优秀(p100前向能做到18ms)。