无人机系统PX4视频教程:飞行PID参数调试
PID参数调试一直是比较头疼的问题,在此给大家带来如下的教程!
完整文章(建议PC下观看,手机的排版有问题)视频教程下载地址:
链接:http://pan.baidu.com/s/1bptl6BP 密码:2zbe
获取更多免费资料或技术咨询请搜索微信公众号:阿木实验室
官网:www.amovauto.com
PIXHAWk无人机PID参数调试实例
PID调参在控制领域一直是个工程的活,理论相对简单,但是参数的标定确实比较困难。
这节的课程就是来指导大家来调试PIXHAWK的PID参数的。有软件仿真和实时视频效果,理论和实践相结合。
PID一句话就是说,经过PID算法计算出的控制量,给执行机构,来达到维持某一个状态的目的。这个控制量的多少,直接影响到系统能不能快速稳定的维持这个状态。比如我们向一个杯子倒一杯水,要求到的刚好满。一开始杯子是空的,我们倒水倾斜力度大,水很快倒入杯中,但是随着水越来越满,我们的倒水倾斜力度会越来越小。如果这个倾斜的力度把握不好那么,水就会溢出。这个PID算法就是在计算这个倒水的倾斜力度,随着时间和水越来越满,动态调整这个倒水的倾斜力度。在杯子是空的时候要加快到水,增加倒水力度,杯子快要满了,减小倒水力度,防止水的溢出。
我们先看PID算法的代码:
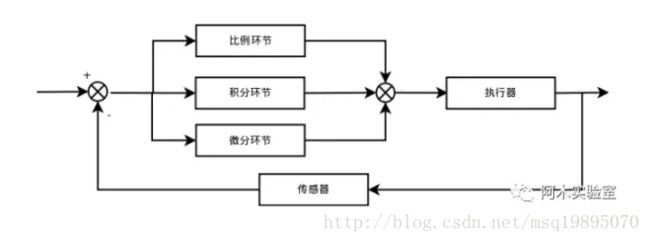
PID 的流程简单到了不能再简单的程度,通过误差信号控制被控量,而控制器本身就是比例、积分、微分三个环节的加和。这里我们规定(在 t 时刻):
1.输入量为 rin(t);
2.输出量为 rout(t);
3.偏差量为 err(t)=rin(t)-rout(t);
1.说明一下反馈控制的原理,通过上一节的框图不难看出,PID 控制其实是对偏差的控制过程;
2.如果偏差为 0,则比例环节不起作用,只有存在偏差时,比例环节才起作用。
3.积分环节主要是用来消除静差,所谓静差,就是系统稳定后输出值和设定值之间的差值,积分环节实际上就是偏差累计的过程,把累计的误差加到原有系统上以抵消系统造成的静差。
4.而微分信号则反应了偏差信号的变化规律,或者说是变化趋势,根据偏差信号的变化趋势来进行超前调节,从而增加了系统的快速性。
第一步:定义 PID 变量结构体,代码如下:
struct _pid{
float SetSpeed;//定义设定值
float ActualSpeed;//定义实际值
float err;//定义偏差值
float err_last;//定义上一个偏差值
float Kp,Ki,Kd;//定义比例、积分、微分系数
float voltage;//定义电压值(控制执行器的变量)
float integral;//定义积分值
}pid;
控制算法中所需要用到的参数在一个结构体中统一定义,方便后面的使用。
第二步:初始化变量,代码如下(以速度控制为例):
void PID_init(){
printf("PID_init begin \n");
pid.SetSpeed=0.0;//设定的速度
pid.ActualSpeed=0.0;//传感器检测的实际速度
pid.err=0.0; //误差初始化
pid.err_last=0.0; //前一刻的误差量
pid.voltage=0.0; //PID输出量
pid.integral=0.0; //PID误差积分项
pid.Kp=0.2; //PID比例系数
pid.Ki=0.015; //PID微分系数
pid.Kd=0.2; printf("PID_init end \n"); //PID积分系数
}
统一初始化变量,尤其是 Kp,Ki,Kd 三个参数,调试过程当中,对于要求的控制效果,可以通过调节这三个量直接进行调节。
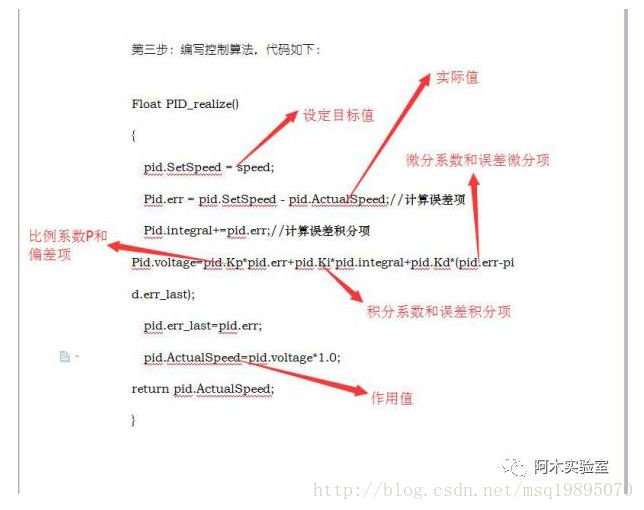
第三步:编写控制算法,代码如下:
Float PID_realize()
{
pid.SetSpeed = speed;
Pid.err = pid.SetSpeed - pid.ActualSpeed;//计算误差项
Pid.integral+=pid.err;//计算误差积分项
Pid.voltage=pid.Kp*pid.err+pid.Ki*pid.integral+pid.Kd*(pid.err-pi
d.err_last);
pid.err_last=pid.err;
pid.ActualSpeed=pid.voltage*1.0;
return pid.ActualSpeed;
}
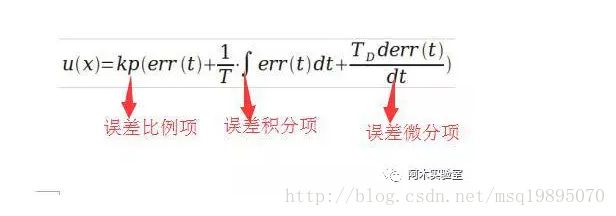
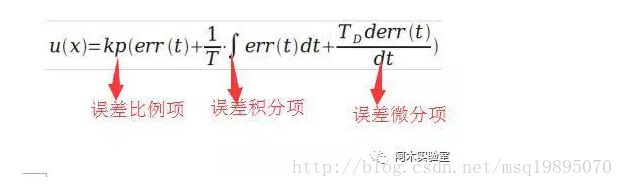
PID的控制规律为:
1.说明一下反馈控制的原理,通过上一节的框图不难看出,PID 控制其实是对偏差的控制过程;
2.如果偏差为 0,则比例环节不起作用,只有存在偏差时,比例环节才起作用。
3.积分环节主要是用来消除静差,所谓静差,就是系统稳定后输出值和设定值之间的差值,积分环节实际上就是偏差累计的过程,把累计的误差加到原有系统上以抵消系统造成的静差。
4.而微分信号则反应了偏差信号的变化规律,或者说是变化趋势,根据偏差信号的变化趋势来进行超前调节,从而增加了系统的快速性。
对于PID讲我们用以下原则:
a.在输出不振荡时,增大比例增益P。(增大P可以快速到稳定)
b.在输出不振荡时,减小积分时间常数Ti。(积分过大容易超调)
c.在输出不振荡时,增大微分时间常数Td。(微分项是预测误差变化率,越接近设定目标,越要减少PID输出,来增加系统的快速性)
PIXHAWK的PID参数调试:
PIXHAWK采用串级PID的方式,外环是控制角度,内环是控制角速度。因为内环更直接作用于电机,所以我们调试PIXHAWK的PID,一般只用调试内环的PID即可(角速度)。
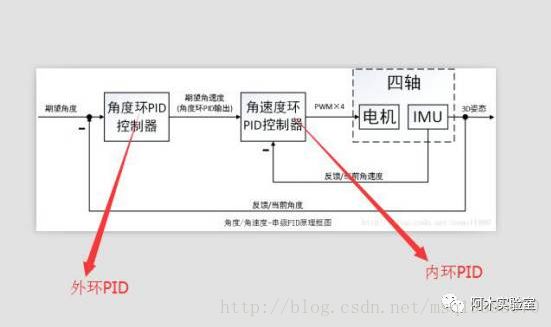
图上我们可以看出内环PID更接近于电机输出,我们在调试PIXHAWK飞控的时候也是先调节内环角速度PID

1:微分调节的现象
我在采用默认PID参数的时候,发现四轴无人机恢复稳定比较慢,有震荡现象。以下是微分作用的PID系统图表:
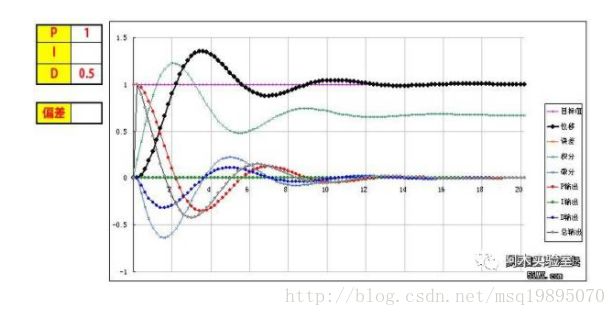
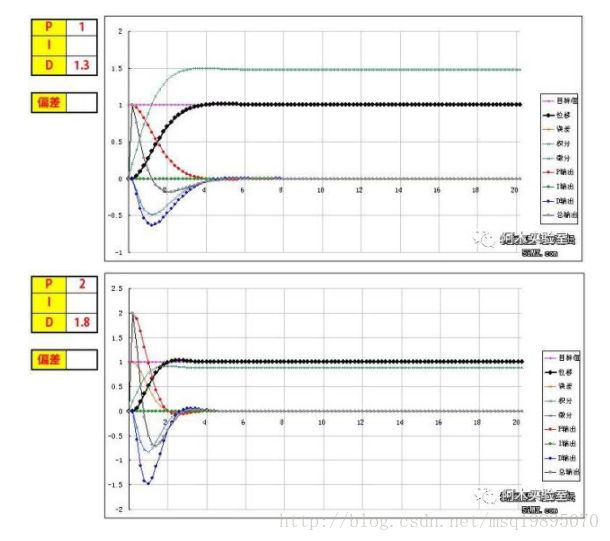
微分过小系统响应速度快,但是产生有衰减振荡。微分过大系统响应速度变慢。
微分D过小在接近设定目标值的时候会产生较大的过充和少量的振荡,但是会衰减。我们采用默认参数出现了衰减的振荡,就是微分D太小,我们增大微分D就可以解决。
2:比例调节的现象
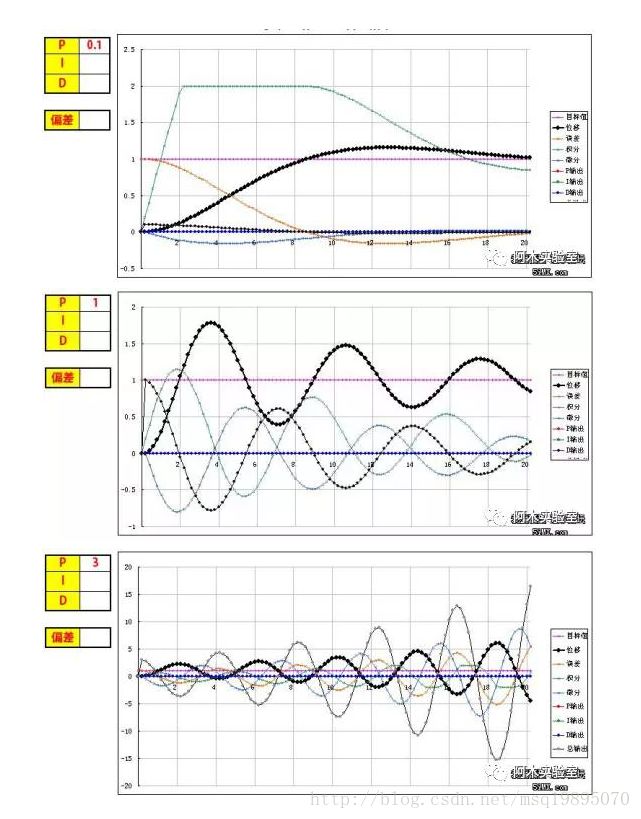
我们发现比例系数过大会导致系统系统响应很快,更有可能导致系统振荡失调,如果发现飞机振荡很厉害,没有衰减,一定是比例系数过大的原因。
3:积分调节的现象
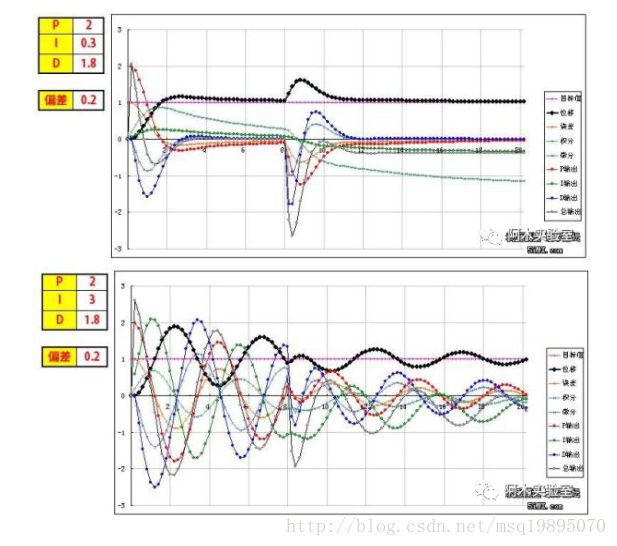
积分过大也会产生振荡失调,因为积分是误差的累积。
总结:系统有衰减振荡,有可能是D(微分过小)或者的I(积分过大)。
系统有振荡越来越大,直到系统不受控制,有可能是P值过大。
在系统默认的PID参数上做调节,逐步修改参数,看试飞效果。
可以适当让微分过冲,增加响应的快速性。
注意!!! 一切PID参数的调试都是基于电调行程校准通过,桨和电机,电调匹配的基础之上。如果飞机飞起来就侧翻(没校准好传感器和电调),或者已解锁就起飞(桨和电机不匹配)。这类飞机都飞不起来的问题,调试PID参数是没有意义的,切记! 调试PID参数是基于飞机飞行的有点不稳,但是基本可以飞行的基础之上!
这部分的参考网站
http://www.stmcu.org/module/forum/thread-601133-1-1.html