2022数学建模国赛B题思路分析
B题是无人机飞行的一个定位问题,题目出的相对来说还算规矩,但是B题没有数据,所有的数据需要自己查找,我会帮助大家收集一部分的数据,大家需要吗?
B题是无人机位置偏移的矫正问题,题目假设了同一高度,队形是圆形,FY00为中心,至少需要两个无人机就可以进行矫正,怎么个矫正法,首先给了表1数据,看x值就发现不可能在圆上,但是题目说了数据是略微偏差。
那么我们可以用表1中1-9的xy值拟合出一个圆公式,圆心是(0,0),那么半径就可以拟合出来了,为什么说需要两个无人机来矫正。
大家看下图1
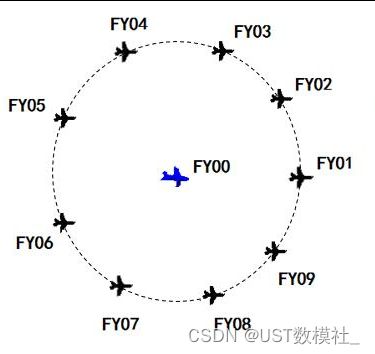
是这个意思,不管用多少个已矫正的无人机给一个待矫正无人机发信号,信号范围是最边缘两条线,如果待矫正无人机的偏离方向在这两条线夹角内,那么就可以被矫正,每个无人机的偏离方向怎么算。
表1中是初始的,我们不是拟合出一个圆吗,题目有说圆上均匀分布,FY01是正前方,FY01与FY00连线正好垂直与圆切线。
那么可以直接由FY00矫正,由此矫正后续的无人机,就有两个了。大家在分析问题的时候一定要仔细,这些细节串起来就是一个完整的逻辑了。
然后说回来,FY01作为圆上的初始点,怎么划分均匀的圆并且返回坐标点,可以再mathwork上搜一下interpclosed函数,这是按点顺序拟合的闭合线拟合函数。
可以设置等比例也就是等长,返回划分好的坐标,有了圆公式就可以多给点样本点进去,这样拟合出来的就是近似圆,闭合线为1,设置等间距比例,最后就会输出均匀间隔长度的点,我们将这些分布在圆上的均匀点作为标准点,对应于不同的无人机,与表1中的数据就可以计算出偏差方向了。
结合上述所说的,我们分别划分已矫正和未矫正的无人机,每次遍历随机取一个可以矫正的无人机进行矫正,然后放入已矫正集合中。
这里可能有点绕,一定要理清楚,按这个步骤合作执行完所有的无人机调整,肯定是会涉及到矫正无人机的顺序。
因为,从已矫正集合中抽取无人机,可以随机抽,但是可能会出现没有满足可矫正的无人机,这种情况要么重来,要么再加一个无人机来矫正,扩大夹角,目标函数就是发射过信号的无人机数量,越少越好
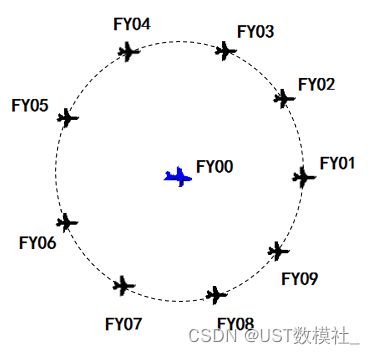
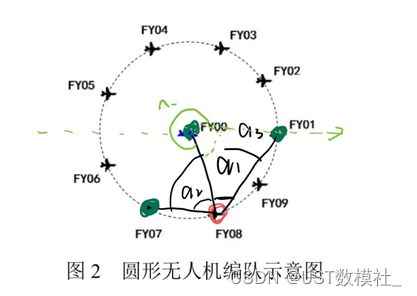
问题1 编队由 10 架无人机组成,形成圆形编队,其中 9 架无人机(编号 FY01~FY09)均匀分布在某一圆周上,另 1 架无人机(编号 FY00)位于圆心(见图 2)。无人机基于自身感知的高度信息,均保持在同一个高度上飞行。
(1) 位于圆心的无人机(FY00)和编队中另 2 架无人机发射信号,其余位置略有偏差的无人机被动接收信号。当发射信号的无人机位置无偏差且编号已知时,建立被动接收信号无人机的定位模型。
本问为一个纯数学问题,需要用到部分极坐标知识。首先建立半径为R,以FY00为原点 (0,0),FY00一本问为一个纯数学问题,需要用到部分极坐标知识.首先建立半径为R,以FY00为原点(0,0),FY 00一FY01为正半轴的极坐标。假设FY00,FY01发射信号, 设令一发射信号的无人机为FYOK, K不等0,1。若已知被动接FY 01为正半轴的极坐标.假设FY 00,FY 01发射信号,设令一发射信号的无人机为FYOK,K不等0,1.若已知被动接收信号的无人机与00, 01,0K的夹角分别为al, a2,a3.由al可知无人机的极坐标夹角为Pi-al,或Pi+al,再由收信号的无人机与00,010K的夹角分别为al,a2,A3。由al可知无人机的极坐标夹角为PI-al,或PI+al,再由a2, a3确定夹角的具体值,从而确定无人机的极坐标位置。
A2,A3确定夹角的具体值,从而确定无人机的极坐标位置。
(2)某位置略有偏差的无人机接收到编号为FY00 和FY01 的无人机发射的信号,另接收到编队中若干编号未知的无人机发射的信号。若发射信号的无人机位置无偏差,除FY00和FY01外,还需要几架无人机发射信号,才能实现无人机的有效定位?
第一问均匀分布至少需要圆周上两架无人机,则可知第二问最少再需要两架,假设圆周上两家无人机发射信号,根据边角关系求解无人机的极坐标。
设a=2pi/9为两无人机之间的夹角,半径为R,除0,1外发射信号无人机编号为K1,K2,则有其与0,1之间夹角分别为K1a,K2a, 设为未知点无人机与原点之间距离为x,与正半轴夹角为θ ,利用三个三角形的边角关系,由正弦定理,可得出四个关系式,后面的持续更新,已经都做完了
↓