机器学习(深度学习)中的反向传播算法与梯度下降
这是自己在CSDN的第一篇博客,目的是为了给自己学习过的知识做一个总结,方便后续温习,避免每次都重复搜索相关文章。
一、反向传播算法
定义:反向传播(Backpropagation,缩写为BP)是“误差反向传播”的简称,其与最优化方法(如梯度下降法)的结合使用 是 用来训练人工神经网络的常用方法。
(该部分的讲解主要参考aift博主的原创文章:“反向传播算法”过程及公式推导(超直观好懂的Backpropagation))
 上图为一个前向(前馈)运算,激活函数为sigmoid:(1/(1+np.exp(-x))),其导数为:sigmoid(1-sigmoid)
上图为一个前向(前馈)运算,激活函数为sigmoid:(1/(1+np.exp(-x))),其导数为:sigmoid(1-sigmoid)
其中:
①i1,i2下方的0.05与0.10表示输入神经元 输出 给后面层的初始值
②o1与02下方的0.01与0.99表示输出神经元的目标输出(target)
③w 12345678 左侧的是其初始权重值
④偏置b1 2的值为0.35与0.60,图示于最下方。
附:
{
①偏置的作用:增加神经元拟合的灵活性。
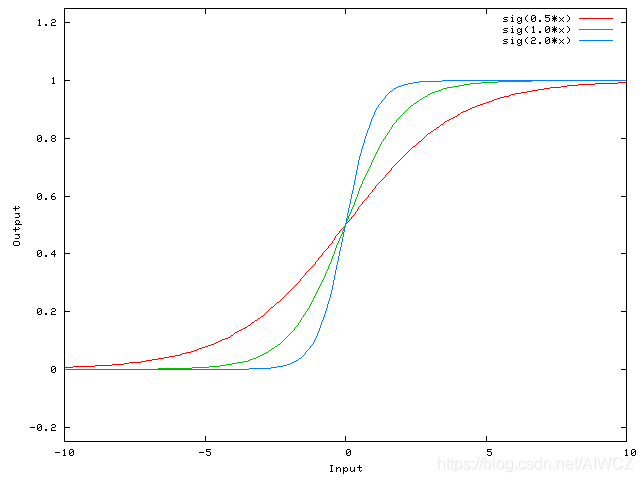
不同的w,输出曲线都相交于一点(0,0.5)。输出曲线只能改变形状,不能挪动位置,网络分类的表现力大大受限。
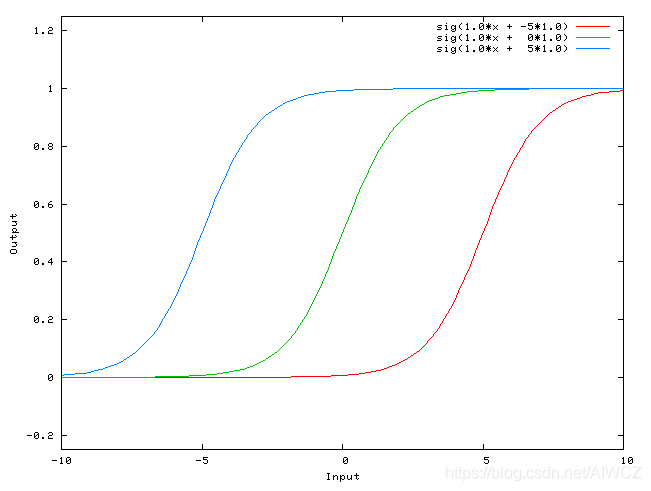
增加偏置后:
 ②采用Batch Normalization后还需要偏置吗?
②采用Batch Normalization后还需要偏置吗?
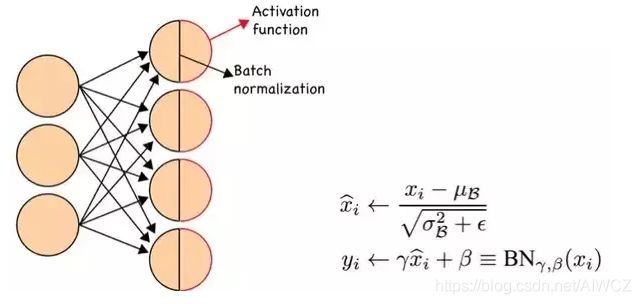 由于经过BN层后,会减去均值μB,因此对于所有xi而言,增加的偏置参数b都会被减去,所以此时偏置b是不需要的。
由于经过BN层后,会减去均值μB,因此对于所有xi而言,增加的偏置参数b都会被减去,所以此时偏置b是不需要的。
从:
![]()
到:
![]()
但并不是不需要偏置了,BN层用β参数作为了新的偏置项。
除了BN以外,还有其他归一化方法,例如LN,IN,GN,这篇文章是个不错的参考:BN,LN,IN,GN都是什么?不同归一化方法的比较
BN的成功多数人认为与内部协方差(ICS)偏移有关,但MIT的这项研究NIPS 2018 | MIT新研究参透批归一化原理 认为两者并无关系,对该领域感兴趣可以进一步研究。
}
下面是反向传播(求网络误差对各个权重参数(即w 12345678)的梯度):
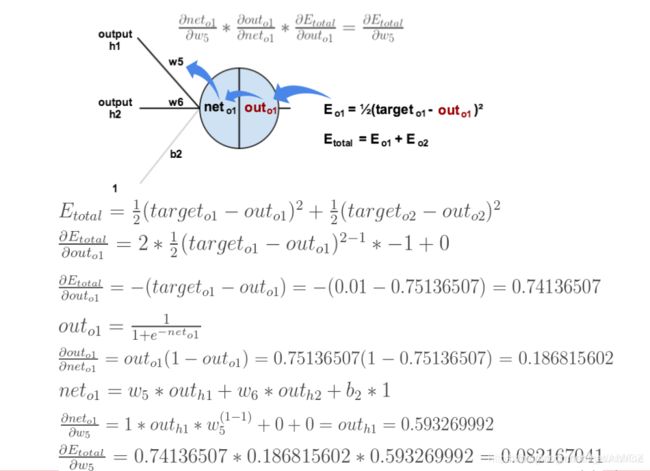
我们先来求最简单的,求误差E对w5的导数。首先明确这就是一个“链式求导”过程,求出导数,也就是梯度,具体请仔细理解下图。
 此时,总误差对w5的梯度已经计算出来,利用梯度下降原理,进行参数更新,如下图:
此时,总误差对w5的梯度已经计算出来,利用梯度下降原理,进行参数更新,如下图:
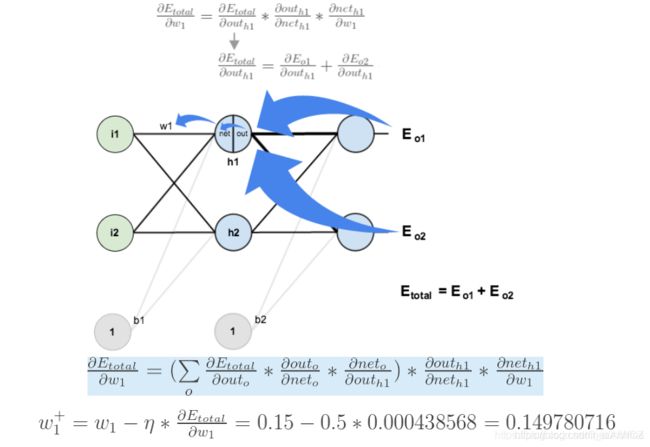
 如果要想求误差E对w1的梯度,误差E对w1的求导路径不止一条,这会稍微复杂一点,但换汤不换药,计算过程如下所示:
如果要想求误差E对w1的梯度,误差E对w1的求导路径不止一条,这会稍微复杂一点,但换汤不换药,计算过程如下所示:
二、梯度下降
目的:给定 目标函数|损失函数|代价函数|误差函数 ,根据梯度寻找函数值最小时,最优 自变量|参数 的值。
可能出现的问题:
由于深度神经网络1.较深的深度 2.非线性函数 这两个主要因素,导致目标的损失函数很容易为非凸函数,损失函数曲面中包含许多驻点,而驻点又分为:1.鞍点 2.局部极小值 3.全局极小值(希望能够找到的)
①对于非凸函数的梯度下降优化,容易陷入1.局部极小值2.鞍点。

②过拟合。

{附定义:
1.驻点:函数的一阶导数为0的点(驻点也称为稳定点,临界点)。对于多元函数,驻点是所有一阶偏导数都为零的点。
2.拐点:设函数y=f(x)在点x0的某邻域内连续,若(x0,f(x0))是曲线y=f(x)凹与凸的分界点,则称(x0,f(x0))为曲线y=f(x)的拐点。
如何判定拐点:1,若函数二阶可导,某点二阶导数值为零,两端二阶导数值异号。2,若函数三阶可导,则二阶导数为0,三阶导数不为0的点就是拐点。
注:拐点(x0,f(x0))是曲线上的一点,它有横坐标和纵坐标,不要只把横坐标当成拐点。
3.鞍点:
 不准确定义:从正交的两个方面来看中间那个点,在一个方向上它是极大值,在另一个方向上它是极小值。
不准确定义:从正交的两个方面来看中间那个点,在一个方向上它是极大值,在另一个方向上它是极小值。
鞍点对Gradient Descent的影响较大,在许多深度学习实验中,往往会有存在鞍点的可能,而若是鞍点较多,则会严重影响Gradient Descent的性能与正确率,而事实上即便在其他算法中,鞍点往往比Local optima更令人头疼,而关于如何解决、或者说避开鞍点,可以参考[How to Escape Saddle Points Efficiently]
4.一些联系:
①对于可导函数,极值点必定是驻点。
②拐点不一定是驻点,驻点也不一定是拐点。
}
三、梯度下降常见算法
介绍批量梯度下降、随机梯度下降、批次梯度下降三种方法,其区别仅限于:采用多少数据来计算目标函数的梯度来更新参数。即对参数更新的准确性与梯度计算时间采用不同的偏向。
①Batch Gradient Descent(也是标准梯度下降)
更新规则:采用整个训练集的数据来计算 目标函数|损失函数|代价函数|误差函数 对参数的梯度。
下式为批量梯度下降一般形式。(其中η表示学习率,后者表示梯度向量)
![]()
优点:对于凸函数可以确保收敛到全局极小值,对于非凸函数可以确保收敛到某个局部极小值。
缺点:每一次更新需要对整个数据集计算梯度,耗时大。
②Stochastic Gradient Descent
**更新规则:**对每个样本计算梯度后,就会对参数进行更新
![]()
优点:
①参数更新速度快(训练速度快)。
②对于非凸函数,较批量随机梯度下降而言,有机会优化至更好的局部极小值。
缺点:
①并不是每次的参数更新都是朝着整体最优的方向,目标函数|损失函数|代价函数|误差函数 震荡较大,对于凸函数的优化而言,较难优化至全局最优点。
与BGD的联系:无限减少学习率η后,SGD与BGD的收敛结果无限逼近。
③Mini-Batch Gradient Descent
更新规则:是上述两种方法更新规则的折中,每次既不使用全部数据也不使用单个数据,而是使用预设定Batch_Size的数据,进行梯度计算,并更新参数。
下图为三种梯度下降方法收敛过程示意图。

优点:
①利用并行化运算,在一个batch的数据上优化网络参数,不会比单个数据慢太多。
②大大减少收敛所需的迭代次数,同时可以使其更接近全局最优的优化方向。
缺点
①Batch_Size需要合理取值,增加一定调参难度。
总结:至此已简要阐述了一阶优化器BGD、SGD、MBGD,但他们都存在如下三个问题。
①位于局部最小值或鞍点时有可能停止优化。
②希望对出现频率低的特征进行较大的更新。
针对以上出现的问题①,出现了移动指数加权平均与动量的概念,来解决上述问题,并提出了下述的两类优化器。
④Momentum xGD(指动量与上述某种梯度下降方式的结合)
提出的目的缓解网络损失函数训练时,小学习率时收敛速度过慢,大学习率时震荡过大的情况。
缓解的方法:将动量的概念引入到参数更新中。在这里,我们可以简单的把动量理解为惯性。
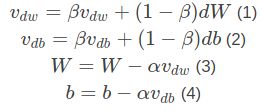
那么在每次进行参数更新前,会参考(这个参考就是惯性的体现)之前数据计算出的梯度(就是下图公式12中的前半部分),再结合本次计算的梯度(下图公式12的后半部分),两者相加最终得出本次参数更新采用的梯度(即Vdw与Vdb)。
实现的方法:上面动量引入的实现就是基于梯度的移动指数加权平均。
①从而具有吸收瞬时突发的能力,也就是平稳性(使得得到的曲线趋势能够更加平缓),减少损失函数的震荡。
②经过迭代可以得出,越靠前的梯度向量,会受到β这个系数(默认取0.9,取值越大收敛越稳定,但也越不容易跳出局部最小值)的指数式衰减,因此会让其有机会跳出局部最优点,摆脱前面数据的束缚。
{
附:
可以采用数据的直接平均吗?
不可以。
主要原因是:当训练到后期,每次对海量已遍历数据进行平均,计算量将非常大,因此采用移动平均进行近似。
移动指数加权平均的偏差修正
当我们将衰减系数β取得非常大的时候,曲线拟合的初期和我们的真实值差距将非常大,如下图中紫色的线。
这个时候采用带修正偏差的指数加权平均公式进行:
 (1-βt)是修正的系数,当解决了初期的差距后,训练到后期,t足够大时,Vt’ = Vt。
(1-βt)是修正的系数,当解决了初期的差距后,训练到后期,t足够大时,Vt’ = Vt。
 }
}
⑤Nesterov Accelerated Gradient(NAG)
与动量法的区别直白来说,就是反正要往前走一步,不如先走这一步,再看路。
这个往前走一步就是历史梯度产生的动量。
下面两个图分别是momentum下降法示意图与NAG下降法示意图。来自深度学习优化函数详解(5)-- Nesterov accelerated gradient (NAG)
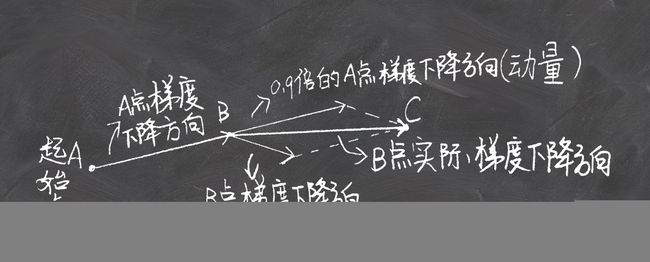
 两者唯一的区别就是,momentum下降法在B点计算当前梯度,NAG下降法在超前点C处计算当前梯度。
两者唯一的区别就是,momentum下降法在B点计算当前梯度,NAG下降法在超前点C处计算当前梯度。
但在优化的过程中,某些变量可能很快得就优化到了极小值附近,而有些可能还在梯度很大的地方,这个时候采用全局统一的学习率就会使前者不稳定后者收敛慢,另外对于经常更新的参数,我们已经积累了大量关于它的知识,不希望被单个样本影响太大,希望学习速率慢一些;对于偶尔更新的参数,我们了解的信息太少,希望能从每个偶然出现的样本身上多学一些,即学习速率大一些。
即根据参数的重要性而对不同的参数进行不同程度的更新。
⑥Adagrad (Adaptive gradient)
梯度更新规则: 我们的出发点是:即根据参数的重要性而对不同的参数进行不同程度的更新。,而在Adagrad中就是用Gt,ii,来量化这个重要性或更新频率。
我们的出发点是:即根据参数的重要性而对不同的参数进行不同程度的更新。,而在Adagrad中就是用Gt,ii,来量化这个重要性或更新频率。
Gt,ii 是一个二阶动量,表示该参数,迄今为止所有梯度值的平方和。
在机器学习的应用中,AdaGrad非常适合样本稀疏的问题,因为稀疏的样本下,每次梯度下降的方向,以及涉及的变量都可能有很大的差异。
AdaGrad的缺点是虽然不同变量有了各自的学习率,但是初始的全局学习率还是需要手工指定。如果全局学习率过大,优化同样不稳定;而如果全局学习率过小,因为AdaGrad的特性,随着优化的进行(Gt,ii累计的梯度过多),学习率会越来越小,很可能还没有到极值就停滞不前了。
⑦Adadelta⑧Root Mean Square Prop(RMSProp)
![]()
由于AdaGrad单调递减的学习率变化过于激进,我们考虑一个改变二阶动量计算方法的策略:不累积全部历史梯度,而只关注过去一段时间窗口的下降梯度。这也就是AdaDelta名称中Delta的来历。
修改的思路很简单。前面我们讲到,指数移动平均值大约就是过去一段时间的平均值,因此我们用这一方法来计算二阶累积动量:
这就避免了二阶动量持续累积、导致训练过程提前结束的问题了。(RMSProp方法基本相同)
⑨Adam:Adaptive Moment Estimation
Adam = Adaptive + Momentum
将一阶动量和二阶动量结合起来。
⑩Nadam(集大成者)
Nadam = Nesterov + Adam
References
[1]https://www.cnblogs.com/guoyaohua/p/8542554.html
[2]https://blog.csdn.net/malefactor/article/details/78768210?utm_source=blogxgwz5#commentBox
[3]https://blog.csdn.net/qq_32623363/article/details/96334862
[4]https://blog.csdn.net/ft_sunshine/article/details/90221691#commentBox
[5]https://blog.csdn.net/willduan1/article/details/78070086
[6]https://blog.csdn.net/tsyccnh/article/details/76673073
[7]https://zhuanlan.zhihu.com/p/32230623