目标检测3--AnchorFree的FCOS
文章目录
-
- 1.介绍
- 2.FCOS中使用的方法
-
- 2.1 网络结构
- 2.2FCOS中使用`FPN`的多级预测
- 2.3FCOS中的中心度
- 3.mmdetection中`FCOS`源码
- 参考资料
欢迎访问个人网络日志知行空间
1.介绍
论文:《FCOS: Fully Convolutional One-Stage Object Detection》
是澳洲阿德莱德大学的Zhi Tian等最早于2019年04月提交的工作成果,发表在ICCV上。
FCOS是全卷积实现的Anchor Free的一阶目标检测器,避免了训练过程中Anchor相关的计算,减少的训练时的计算量和内存占用,移除了anchor相关的一系列超参数。
Anchor Based方法的缺点:
- 检测性能对
anchor的size/aspect ratio/数量比较敏感。 - 实际对象的检测框大小分布较广泛,
anchor不一定能覆盖 - 为了得到高召回率,
anchor based的方法返回了非常多的anchor box,如FPN中,输入短边为800的图像将总共生成大于180K个Anchor Box。超级多的anchor box除了影响性能外,还导致了严重的类别不平衡问题,因为180K个anchor box中有大量的都是不包含对象的negative box
neat fully convolution pixel prediction framework 因anchor box的存在不适用于object detection。先前的预测方法在目标检测框重叠时检测效果不好,如DenseBox。FCOS在距离目标中心较远的位置产生很多低质量的预测边框,这会影响检测的效果,为了克服这个问题,引入了中心度的概念,衡量预测框到距目标框的距离。FCOS添加单层分支,与分类分支并行,以预测"Center-ness"位置。
FCOS的优点:
- 全
FCN结构,与pixel prediction任务的网络统一,更便于复用语义分割中的tricks anchor free框架,减少模型的设计参数。anchor free框架,减少训练中的IoU计算和box match.FCOS可用于two-stage检测网络中的RPN- 易于拓展应用于其他视觉任务,如
Instance Segmentation等
Anchor Free目标检测器有YoloV1,CornerNet。
2.FCOS中使用的方法
2.1 网络结构
将目标检测任务形式化为pixel prediction任务,使用多级预测提升召回率,解决重叠目标的模糊问题。
特征图上的点(x,y)可以重新映射到输入原图上:
( ⌊ s 2 ⌋ + x s , ⌊ s 2 ⌋ + y s ) (\lfloor \frac{s}{2}\rfloor+xs, \lfloor \frac{s}{2}\rfloor+ys) (⌊2s⌋+xs,⌊2s⌋+ys)
FCOS直接将(x, y)对应的检测框位置当作训练样本,具体是指,当(x,y)映射到原图上落入任何ground-truth box中,这个点就当成正样本,否则就是负样本。检测定位回归的变量是 t ∗ = ( l ∗ , t ∗ , r ∗ , b ∗ ) t^*=(l^*, t^*, r^*, b^*) t∗=(l∗,t∗,r∗,b∗), t ∗ t^* t∗分别指中心(x, y)距检测框左/上/右/下四条边的距离。
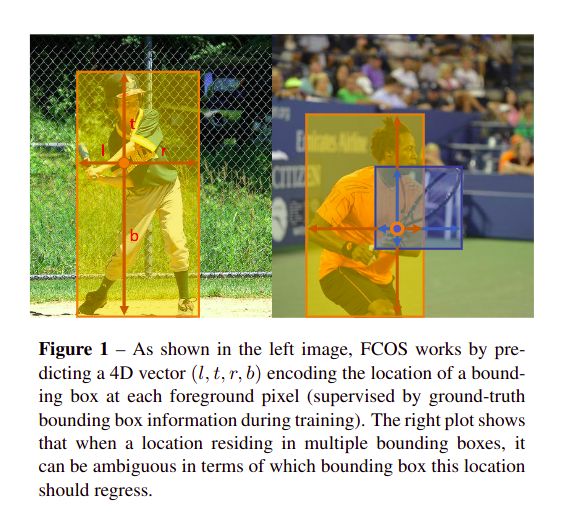
当feature map上的某个点(x,y)同时落入多个bounding box中时,这个点(x,y)被当成ambiguous sample, FPN的multi level机制可以用来解决这个问题。很显然,通过上述介绍可以知道,FCOS中可能有多个feature map上的点(x, y)落入到同个ground truth box中,故可以生成很多positive boxes用于训练。

网络输出
训练了C个二分类器,而非1个多分类器,可以实现多标签预测。feature map后接有4个卷积层的分类分支和位置回归分支,回归分支使用了exp(x),将回归预测变量x变换到了(0, +\infinity)上,输出的变量比anchor based方法少9倍。
损失函数
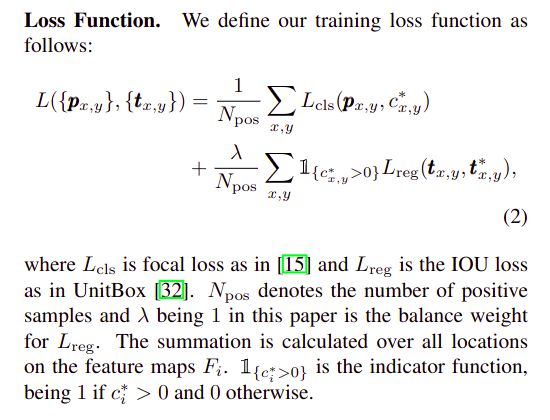
分类使用的是Focal Loss解决类别不平衡问题,回归使用的是IoU损失。
2.2FCOS中使用FPN的多级预测
FCOS中的两个问题:
- 1) 到最终输出的
feature map使用大stride如x16会导致低BPR(best possible recall)。Anchor Based方法可以对positive box使用低的IoU阈值来补偿这个问题,而对于FCOS,直观的一个猜想是,对于小物体,stride过大时,可能导致feature map上并没有一个点可以与小目标的中心对应,故BPR应该会比较低。 - 2) 重叠的目标框引入了棘手的模糊性问题,
feature map中的一个点(x, y)如何确定应该用来回归重叠框中的哪一个呢?
使用FPN的多级预测解决FCOS中存在的这两个问题。
同FPN,使用不同层级中的feature map来预测不同大小的目标。限制不同level feature map回归距离 t ∗ = ( l ∗ , t ∗ , r ∗ , b ∗ ) t^*=(l^*, t^*, r^*, b^*) t∗=(l∗,t∗,r∗,b∗)的上限, m i m_i mi表示level i的feature map上每个点回归的最大距离,因此若level i的feature map上某个点回归的距离 t ∗ = ( l ∗ , t ∗ , r ∗ , b ∗ ) t^*=(l^*, t^*, r^*, b^*) t∗=(l∗,t∗,r∗,b∗) 大于 m i m_i mi或小于 m i − 1 m_{i-1} mi−1时,就将其当作negative box对于 { P 3 , P 4 , P 5 , P 6 , P 7 } \{P_3,P_4,P_5,P_6,P_7\} {P3,P4,P5,P6,P7}对应的 m i m_i mi分别为 0 , 64 , 128 , 256 , 512 , + ∞ 0, 64, 128, 256, 512, +\infty 0,64,128,256,512,+∞。
前面介绍的因预测的是距离,故 t ∗ ∈ ( 0 , ∞ ) t^*\in(0, \infty) t∗∈(0,∞)因此使用了exp函数,现在不同level的回归距离范围是不同的,再使用相同的head就不合理了,增加一个参数 s i s_i si,使用 e x p ( s i x ) exp(s_ix) exp(six)函数,对不同level使用不同的 s i s_i si
2.3FCOS中的中心度
可能有多个feature map中的点对应同个物体检测框,而距离中心较远的feature map点会导致引入很多低质量的物体检测框,影响检测的效果。
FCOS引入了中心度centerness来描述一个点距离目标框中心的远近,以过滤掉偏离中心点的低质量检测框。中心度是通过一个与分类分支并行的单层分支来预测的。对于某个位置的回归目标 ( l ∗ , t ∗ , r ∗ , b ∗ ) (l^*, t^*, r^*, b^*) (l∗,t∗,r∗,b∗),其中心度的定义为:
c e n t e r n e s s ∗ = m i n ( l ∗ , r ∗ ) m a x ( l ∗ , r ∗ ) × m i n ( t ∗ , b ∗ ) m a x ( t ∗ , b ∗ ) centerness^*=\sqrt{\frac{min(l^*,r^*)}{max(l^*,r^*)}\times \frac{min(t^*,b^*)}{max(t^*,b^*)}} centerness∗=max(l∗,r∗)min(l∗,r∗)×max(t∗,b∗)min(t∗,b∗)
sqrt 运算可以减缓中心度的衰减速度。centerness取值范围0-1,训练使用二分类交叉熵BCE,加到前述的损失函数中一起训练,预测时,将centerness与分类评分score相乘后作为最后检测框的评分,再进行NMS,因此很多偏离中心的框就能被过滤掉了。
3.mmdetection中FCOS源码
FCOS网络结构的定义如上图中二所示,定义的文件在mmdetection工程``文件中。
看一下FCOS Head,从计算loss是使用的self.get_targets方法开始。
def _get_target_single(self, gt_bboxes, gt_labels, points, regress_ranges,
num_points_per_lvl):
"""Compute regression and classification targets for a single image."""
num_points = points.size(0)
num_gts = gt_labels.size(0)
if num_gts == 0:
return gt_labels.new_full((num_points,), self.num_classes), \
gt_bboxes.new_zeros((num_points, 4))
areas = (gt_bboxes[:, 2] - gt_bboxes[:, 0]) * (
gt_bboxes[:, 3] - gt_bboxes[:, 1])
# TODO: figure out why these two are different
# areas = areas[None].expand(num_points, num_gts)
areas = areas[None].repeat(num_points, 1)
regress_ranges = regress_ranges[:, None, :].expand(
num_points, num_gts, 2)
gt_bboxes = gt_bboxes[None].expand(num_points, num_gts, 4)
xs, ys = points[:, 0], points[:, 1]
xs = xs[:, None].expand(num_points, num_gts)
ys = ys[:, None].expand(num_points, num_gts)
left = xs - gt_bboxes[..., 0]
right = gt_bboxes[..., 2] - xs
top = ys - gt_bboxes[..., 1]
bottom = gt_bboxes[..., 3] - ys
bbox_targets = torch.stack((left, top, right, bottom), -1)
if self.center_sampling:
# condition1: inside a `center bbox`
radius = self.center_sample_radius
center_xs = (gt_bboxes[..., 0] + gt_bboxes[..., 2]) / 2
center_ys = (gt_bboxes[..., 1] + gt_bboxes[..., 3]) / 2
center_gts = torch.zeros_like(gt_bboxes)
stride = center_xs.new_zeros(center_xs.shape)
# project the points on current lvl back to the `original` sizes
lvl_begin = 0
for lvl_idx, num_points_lvl in enumerate(num_points_per_lvl):
lvl_end = lvl_begin + num_points_lvl
stride[lvl_begin:lvl_end] = self.strides[lvl_idx] * radius
lvl_begin = lvl_end
x_mins = center_xs - stride
y_mins = center_ys - stride
x_maxs = center_xs + stride
y_maxs = center_ys + stride
center_gts[..., 0] = torch.where(x_mins > gt_bboxes[..., 0],
x_mins, gt_bboxes[..., 0])
center_gts[..., 1] = torch.where(y_mins > gt_bboxes[..., 1],
y_mins, gt_bboxes[..., 1])
center_gts[..., 2] = torch.where(x_maxs > gt_bboxes[..., 2],
gt_bboxes[..., 2], x_maxs)
center_gts[..., 3] = torch.where(y_maxs > gt_bboxes[..., 3],
gt_bboxes[..., 3], y_maxs)
cb_dist_left = xs - center_gts[..., 0]
cb_dist_right = center_gts[..., 2] - xs
cb_dist_top = ys - center_gts[..., 1]
cb_dist_bottom = center_gts[..., 3] - ys
center_bbox = torch.stack(
(cb_dist_left, cb_dist_top, cb_dist_right, cb_dist_bottom), -1)
inside_gt_bbox_mask = center_bbox.min(-1)[0] > 0
else:
# condition1: inside a gt bbox
inside_gt_bbox_mask = bbox_targets.min(-1)[0] > 0
# condition2: limit the regression range for each location
max_regress_distance = bbox_targets.max(-1)[0]
inside_regress_range = (
(max_regress_distance >= regress_ranges[..., 0])
& (max_regress_distance <= regress_ranges[..., 1]))
# if there are still more than one objects for a location,
# we choose the one with minimal area
areas[inside_gt_bbox_mask == 0] = INF
areas[inside_regress_range == 0] = INF
min_area, min_area_inds = areas.min(dim=1)
labels = gt_labels[min_area_inds]
labels[min_area == INF] = self.num_classes # set as BG
bbox_targets = bbox_targets[range(num_points), min_area_inds]
return labels, bbox_targets
中心度的计算:
def centerness_target(self, pos_bbox_targets):
"""Compute centerness targets.
Args:
pos_bbox_targets (Tensor): BBox targets of positive bboxes in shape
(num_pos, 4)
Returns:
Tensor: Centerness target.
"""
# only calculate pos centerness targets, otherwise there may be nan
left_right = pos_bbox_targets[:, [0, 2]]
top_bottom = pos_bbox_targets[:, [1, 3]]
if len(left_right) == 0:
centerness_targets = left_right[..., 0]
else:
centerness_targets = (
left_right.min(dim=-1)[0] / left_right.max(dim=-1)[0]) * (
top_bottom.min(dim=-1)[0] / top_bottom.max(dim=-1)[0])
return torch.sqrt(centerness_targets)
Focal Loss的定义:
pred_sigmoid = pred.sigmoid()
target = target.type_as(pred)
pt = (1 - pred_sigmoid) * target + pred_sigmoid * (1 - target)
focal_weight = (alpha * target + (1 - alpha) *
(1 - target)) * pt.pow(gamma)
loss = F.binary_cross_entropy_with_logits(
pred, target, reduction='none') * focal_weight
参考资料
- 1.https://zhuanlan.zhihu.com/p/63868458
- 2.https://zhuanlan.zhihu.com/p/32423092