自动驾驶中的泊车功能
一、自动驾驶中的泊车功能分类

1.1 L2 自动泊车(APA,RPA)
相比于L2以下的辅助泊车功能,APA功能有时又成为F-APA功能。下表是L2以下泊车辅助的一个简要介绍。

APA(Auto Parking Asist)自动泊车是生活中最常见的泊车辅助系统。泊车辅助系统在汽车低速巡航时,使用超声波雷达感知周围环境,帮助驾驶员找到尺寸合适的空车位,并在驾驶员发送泊车指令后,将汽车泊入车位。
RPA(Remote Parking Asist)远程遥控泊车辅助系统相比于APA加入了与驾驶员通讯的车载蓝牙模块,不再需要驾驶员坐在车内监控汽车的泊车过程,仅需要在车外观察即可。
1.1.1 常见的传感器配置
相比与APA,RPA还增加了蓝牙模块。

1.1.2 检测过程
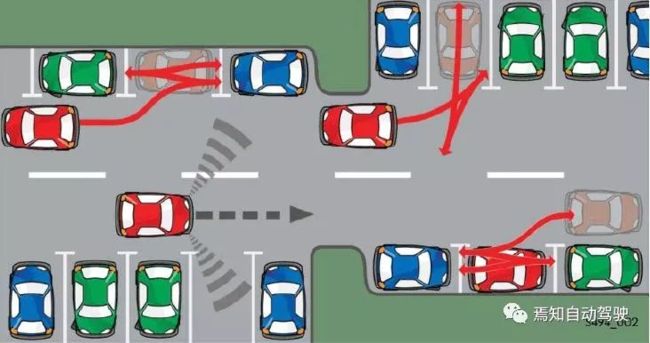
APA超声波雷达的探测范围远而窄,常见APA最远探测距离为5米;UPA超声波雷达的探测范围近而宽,常见的UPA探测距离为3米。不同的探测范围决定了他们不同的分工。
APA超声波雷达的作用是在汽车低速巡航时,完成空库位的寻找和校验工作。如下所示,随着汽车低速行驶过空库位,安装在前侧方的APA超声波雷达的探测距离有一个先变小,再变大,再变小的过程。一旦汽车控制器探测到这个过程,可以根据车速等信息得到库位的宽度以及是否是空库位的信息。后侧方的APA在汽车低速巡航时也会探测到类似的信息,可根据这些信息对空库位进行校验,避免误检。

1.1.3 泊车原理
使用APA超声波雷达检测到空库位后,汽车控制器会根据自车的尺寸和库位的大小,规划出一条合理的泊车轨迹,控制方向盘、变速箱和油门踏板进行自动泊车。在泊车过程中,安装在汽车前后的8个UPA会实时感知环境信息,实时修正泊车轨迹,避免碰撞。
APA自动泊车辅助需要驾驶员在车内实时监控,以保证泊车顺利完成,属于SAE Level 2级。
RPA自动泊车辅助则只需站在车外操作,以保证泊车顺利完成,属于SAE Level 2+级。
1.1.4 功能场景
1.1.4.1 APA的功能场景

1.1.4.2 RPA增加的功能场景
-
遥控进出
最早诞生的遥控泊车功能应该就是遥控进出,此功能主要适用于狭窄垂直车位、车门不易打开的场景,见下图。用户停车时,可首先将车停在车位前,再下车使用遥控装置控制车辆驶进车位。用户取车时,先在车外通过遥控装置启动发送机及遥控泊车系统,再控制车辆驶出车位。

-
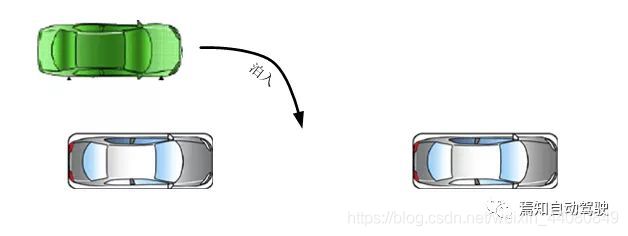
遥控泊入
用户先在车内开启遥控泊车系统,搜索并确认目标车位,再挂入P挡,拉起EPB后下车,在车外使用遥控装置发出泊入指令,遥控泊车系统控制车辆完成泊入。遥控泊入一般可支持平行车位、垂直车位和倾斜车位。
a. 垂直车位

b. 平行车位
c. 倾斜车位

-
遥控泊出
用户在车外使用遥控装置启动发动机和遥控泊车系统,在用户继续发出泊出指令后,遥控泊车系统控制车辆泊出。遥控泊出一般支持平行车位

1.1.5 相关法规
ISO 16787-2017 智能运输系统. 驻车辅助系统(APS). 性能要求和试验规程
车位
性能
ISO 20900:2019 Intelligent transport systems — Partially automated parking systems (PAPS) — Performance requirements and test procedures
1.2 L4 自主泊车(HZP,AVP)
在汽车变得越来越聪明后,驾驶员的期望也越来越高。他们希望在大雨天下班时,不用自己冒雨取车,而是用手机发送指令后,汽车能自己启动,泊出车位,并行驶到他们面前。
记忆式泊车HZP,可以根据轨迹学习,行驶到固定车位实现停车。
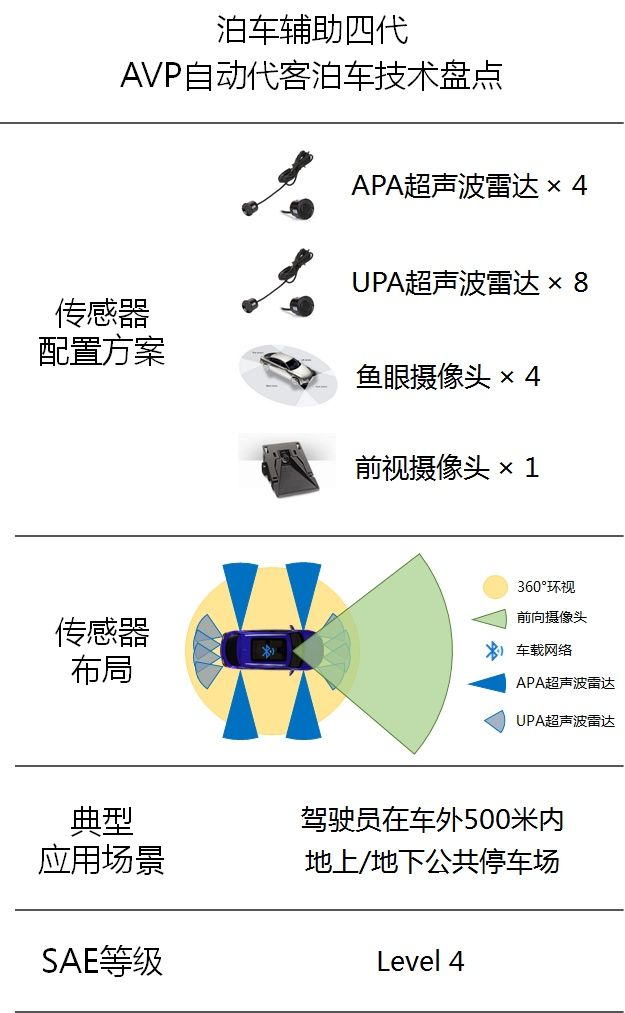
自主代客泊车AVP(Automated Valet Parking)被称为是解决用户“最后一公里自由”的L4级自动驾驶技术,是目前最有希望实现商业落地的自动驾驶技术应用场景。
1.2.1 常见的传感器配置
1.2.2 泊车原理
1.2.2.1 HZP功能原理
驾驶员在准备停车前,可以在库位不远处,开启“路线学习”功能,随后慢慢将汽车泊入固定车位,系统就会自学习该段行驶和泊车路线。泊车路线一旦学习成功,车辆便可达到“过目不忘”。
完成路线的学习后,在录制时的相同起点下车,用手机蓝牙连接汽车,启动自学习泊车辅助系统,汽车就能够模仿先前录制的泊车路线,完成自动泊车了。
驾驶员除了让汽车学习泊入车库的过程外,还能够学习汽车泊出,并行驶到办公楼的过程。聪明的汽车能够自动驾驶到我们面前,即使在大雨天也不用害怕冒雨取车了。
1.2.3 功能场景
1.2.3.1 一键泊车
一键泊车功能的基本要求如下:用户在指定下客点下车,通过手机 APP下达泊车指令,车辆在接收到指令后可自动行驶到停车场的停车位,不需要用户操纵与监控。若多辆车同时收到泊车指令,可实现多车动态的自动等待进入泊车位。

1.2.3.2 一键召唤
一键召唤功能的基本要求如下:用户通过手机 APP下达取车指令,车辆在接收到指令后可以从停车位自动行驶到指定上客点接驾。

二、AVP落地前景
2.1 市场刚需旺盛
2.1.1 解决4大泊车痛点
a)难以一次停车到位

b) 停车排队浪费时间

c) 取车步行距离较远

d) 找不到停车位
讨论市场对自主代客泊车的刚需,让我们先看前段时间的一个社会新闻——北京一女子记错位置,在停车场花3小时才找到车,崩溃痛哭20分钟。这段新闻中的女司机在停车场始终找不到车,找车期间,女子询问了十几个工作人员,一名库管工作人员骑车带着她挨个找了一遍,最后花了2小时40分钟,终于把车找着了,看到车的一瞬间,女子崩溃了……。

在这段新闻中,除了说明该名女司机是个路痴以外,更说明了停车难、取车难是现代城市生活的一大痛点,自主代客泊车AVP是毫无疑问的市场刚需。
2.1.2 解决移动出行三大难题
除服务于个人用户外,自主代客泊车AVP也可以解决移动出行公司面临的三大难题:
- 取还车复杂,用户体验差;
- 车辆调度消耗大量成本及运维资源;
- 停车场停车位资源使用不合理。
2.1.3 具备场景效益
如可提升停车场利用率20%;令寻车位时间缩短10-15分钟以及减少10%的交通拥堵等。
ToC和ToB两种模式的刚需是AVP商业落地的最大驱动力,根据预测,到2025年,包括服务费、授权费及停车场改造收入在内,AVP市场规模将超过400亿元。
2.1.4 安全性更高
戴姆勒与奔驰联合开发的自主代客泊车从2018年开始在斯图加特的梅赛德斯-奔驰博物馆正式运营,成为AVP在世界上的首个落地应用。
该项目之所以能在奔驰博物馆率先落地,是因为德国基于《维也纳公约》中规定的私人停车场业主方有权来定义车辆行为是否合规的规定,向其颁发了许可。同时,戴姆勒和博世还联合政府通过莱茵集团作为第三方认证机构,在推导了近1000种功能场景后,认定AVP技术的安全性要求要高于人泊车30%。
2.2 技术与法律风险小
自动驾驶的应用场景可以大致从车速范围及场景复杂度两个维度进行分类,见下图。
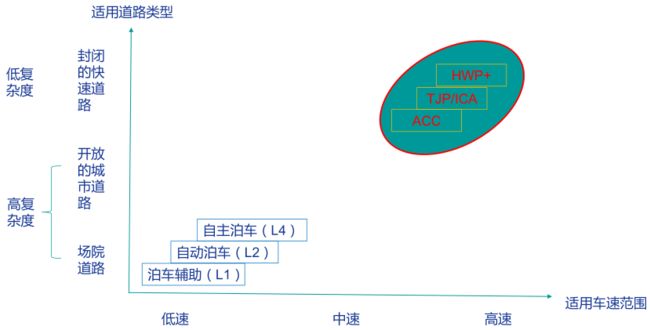
停车场虽然属于高复杂度的开放道路,但是由于车速较低、车中无人、交通参与者较少,使得系统可以进行急刹车等操作,安全风险及技术难度相对较小。同时,由于使用场景限定在停车场区域,面临的法律障碍较小,且不存在“保乘客还是保行人”的伦理难题。
2.3 标准法规的逐步完善
目前国际国内尚未正式发布针对自主代客泊车的标准法规,但相关工作进展较快,其中中国汽车工程学会已于5月7日发布了团体标准《自主代客泊车系统总体要求》的征求意见稿,由法雷奥牵头制定的ISO标准——《ISO/AWI 23374-1 Intelligent transport systems — Automated valet parking systems (AVPS) — System framework, communication interface, and vehicle operation》预计在21年初发布。
相信在未来两三年内,自主代客泊车面临的法律障碍物都会一一有个答案。
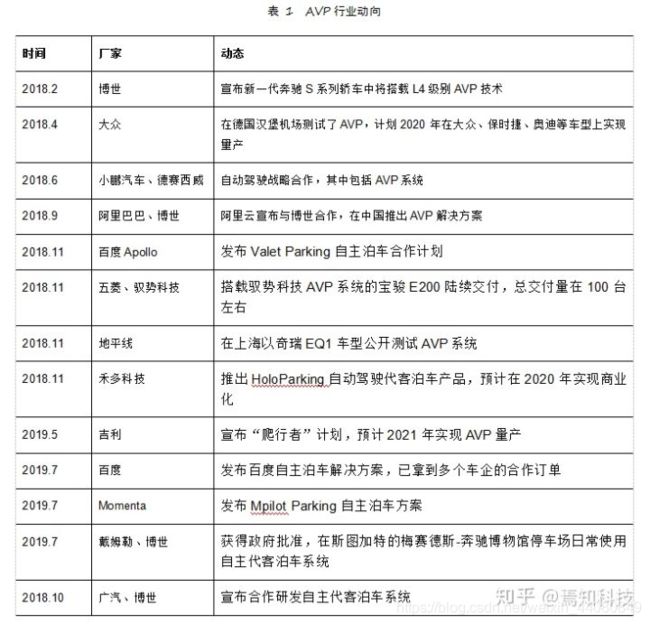
2.4 行业近期动向
车位类型

AVP的难点

参考文章:
- https://zhuanlan.zhihu.com/p/147633073
- https://blog.csdn.net/weixin_42229404/article/details/94022517
- https://auto.sina.com.cn/jishu/2020-09-22/detail-iivhuipp5731310.shtml