openGL 3D geometry 之数学部分
以下内容是自己从各处整理出来,便于自己的理解,以便忘记后回忆恢复。
1.裁切空间
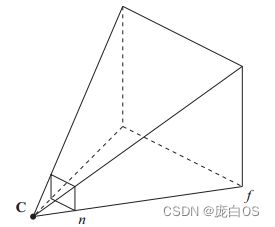
1. opengl 只会处理视椎体内的物体,f不是无穷远是因为Z深度精度问题所限,n不是o点,因为越近越大。因为视椎体的取舍,舍了完备,留下的已经足够了用了。
2.因为视椎体的原因,必然会有裁切,因此有物体就是在边界,还有一些在视椎体外。
3.理论上直接用视椎体来裁切也行,但是裁切不是那么方便,还有三角形视椎体交点插值问题。
目前用的标准方案如下:
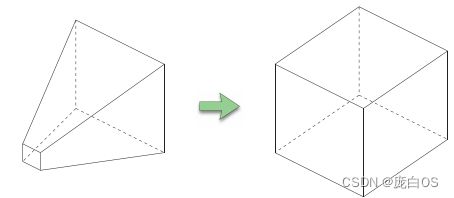
将视椎体frustum变换为CVV(规则观察体(Canonical View Volume)。
在规则的立方体进行裁切,自然比较简单,并且这个变换就是一次matrix矩阵乘法。
之后在用逆矩阵就可以变换回来。简洁明了。
2.点,向量,齐次空间
这是重点内容,首先点和向量的问题。这其实是关键。我一开始没搞明白的根本原因就出在这里。
“齐次坐标表示是计算机图形学的重要手段之一,它既能够用来明确区分向量和点,同时也更易用于进行仿射(线性)几何变换。”—— F.S. Hill, JR。
事实上,到现在我还是有点模糊。不能想象出3D齐次空间是什么样子。
以下内容参考:
什么是齐次坐标? - 知乎
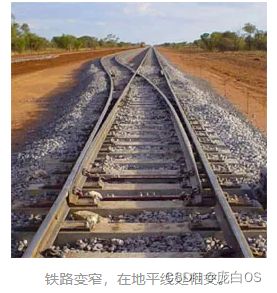
问题:两条平行线可以相交?
在欧氏空间(几何学)中,同一平面上的两条平行线不能相交,或者说不能永远相交。这是一个大家都熟悉的常识。
但是,在投影空间中就不一样了,比如,下图上的火车铁路在远离眼睛的时候会变得更窄。最后,两条平行的铁轨在地平线处相交,也就是无限远处的一点。
欧氏空间(或笛卡尔空间)能很好地描述我们的2D/3D几何,但它们不足以处理投影空间(实际上,欧氏几何是投影几何的一个子集)。一个2D点的笛卡尔坐标可以表示为(x,y)。
如果这个点远去到无穷远呢?无穷远处的点在欧氏空间中无法具体展示。在投影空间中,平行线会在无穷远处相遇,但在欧氏空间中却做不到。
那么数学家如何用数学的方法来描述这个问题呢?
解决方案: 齐次坐标
由 August Ferdinand Möbius(不错,就是那个莫比乌斯圈的那位) 提出的齐次坐标,使图形和几何学的计算在投影空间中成为可能。齐次坐标是用N+1个数来表示N维坐标的一种方式。
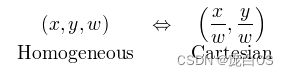
要制作二维齐次坐标,我们只需在现有坐标中增加一个额外的变量w。因此,笛卡尔坐标中的一点,(X,Y)在齐次坐标中就变成了(x,y,w)。而笛卡儿坐标中的X和Y在齐次坐标中的x、y和w则重新表达为
X = x/w
Y = y/w为什么叫 “齐次”呢?
如前所述,为了将齐次坐标(x,y,w)转换为笛卡尔坐标,我们只需将x和y除以w即可。
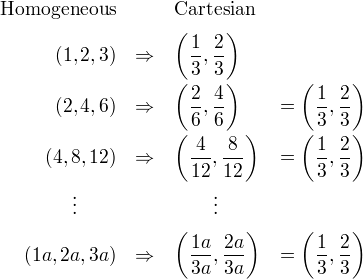
将Homogeneous转换为Cartesian,我们可以发现一个重要的事实。让我们看看下面的例子。
如你所见 (1, 2, 3), (2, 4, 6)和(4, 8, 12)这三个点对应于同一个欧氏点(1/3, 2/3). 而任何乘以a的数(1a,2a,3a)与欧氏空间中的(1/3,2/3)是同一个点。因此,这些点是 “homogeneous/齐次 “的,因为它们在欧氏空间(或笛卡尔空间)中代表同一个点。换句话说,齐次坐标是与乘数a不相关的。
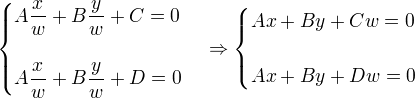
数学证明: 两条平行线可以相交
考虑以下欧氏空间的线性系统。
而我们知道,由于C≠D,所以上述方程没有解。 如果C=D,那么两条线是相同的(重叠的)。
让我们重写投影空间的方程,将x和y分别替换为x/w,y/w。
现在,我们有一个解,(x,y,0),因为(C-D)w=0,∴w=0. 因此,两条平行线在(x,y,0)处相交.
(x,y,0)在几何上代表一条没有起点与终点, 也没有长度的射线,它只有方向。
齐次坐标的应用
齐次坐标在计算机图形学中是非常有用的基本概念,通过增加一个额外的维度W后,可以用来对几何体进行缩放,旋转,平移,透视投影的矩阵变换.
任何N维度齐次坐标,只要W不为0,都可以通过将每一个分量除以W来转换到 W=1的向量, 然后获得其N-1维的欧式空间的点值。
而当W=0时,这个坐标表示无限长的一个向量,通常表示N-1维的矢量。


齐次坐标的一个重要的优点就是能区分点和向量。简单点就是说,比如二维空间(x,y)这是个点,还是个向量?无法区分!如F.S. Hill, JR所说,在齐次坐标上就能,(x,y,1)是点,(x,y,0)是向量。
同理在3维空间,如果是点世界,那么点(x,y,z)=V+P0必然有位置信息P0。而向量(x,y,z)只是一个有大小和方向的信息,没有位置信息。也就是说,无法用(x,y,z)来同时表达3维的点与向量。如果要区分就必需要加一个维度信息。
3维世界的点集,由于参考原点的变化,构成了4维空间。就像时间流逝一样,变成4维空间。是不是很神奇?
再来展开一下点和向量:
深入探索透视投影变换_popy007的博客-CSDN博客_透视投影变换
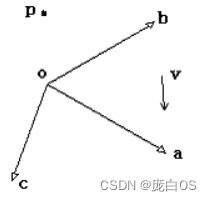
根据《向量几何在游戏编程中的使用6》中关于基的概念。对于一个向量v以及基oabc,
可以找到一组坐标(v1,v2,v3),使得
v = v1 a + v2 b + v3 c (1)
而对于一个点p,则可以找到一组坐标(p1,p2,p3),使得
p – o = p1 a + p2 b + p3 c (2)
从上面对向量和点的表达,我们可以看出为了在坐标系中表示一个点(如p),我们把点的位置看作是对这个基的原点o所进行的一个位移,即一个向量——p – o(有的书中把这样的向量叫做位置向量——起始于坐标原点的特殊向量),我们在表达这个向量的同时用等价的方式表达出了点p:
p = o + p1 a + p2 b + p3 c (3)
(1)(3)是坐标系下表达一个向量和点的不同表达方式。这里可以看出,虽然都是用代数分量的形式表达向量和点,但表达一个点比一个向量需要额外的信息。如果我写出一个代数分量表达(1, 4, 7),谁知道它是个向量还是个点!
我们现在把(1)(3)写成矩阵的形式:
这里(a,b,c,o)是坐标基矩阵,右边的列向量分别是向量v和点p在基下的坐标。这样,向量和点在同一个基下就有了不同的表达:3D向量的第4个代数分量是0,而3D点的第4个代数分量是1。像这种这种用4个代数分量表示3D几何概念的方式是一种齐次坐标表示。“齐次坐标表示是计算机图形学的重要手段之一,它既能够用来明确区分向量和点,同时也更易用于进行仿射(线性)几何变换。”—— F.S. Hill, JR
————————————————
版权声明:本文为CSDN博主「popy007」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/popy007/article/details/1797121

如上,就是一种齐次坐标表示。w=1就是我们所在的3维空间。
进一步投影空间和齐次空间是很有关系,有时候很容易模糊深度和w。没有错,它们真的有一种同构关系。(x,y,1)是一个点,那么在w=1时,就是一个点,当w->无穷大时,这个点就变成(x/无穷大,x/无穷大,1/无穷大)那么这个点就很有意思了,变成(0,0,0),就像我们拿同样一个画,离我们越远,这个投影就越小,拿到很远时,就成了一个点。画还是那幅画,homegenuos齐次就是相同的东西生成的意思。
3 透视投影
参考自:3D游戏与计算机图形学中的数学方法
裁切非常重要,目前标准的做法是在CVV中干这事。方便算(1.容易判断是否在椎体外面,2,方便插入交点值)
推导过程:
推导要领:先计算x,y的投影到CVV。然后计算Z的投影到CVV。要注意一点,这个投影必须考虑光栅化的要求,即扫描点是线性的。特别是Z值。
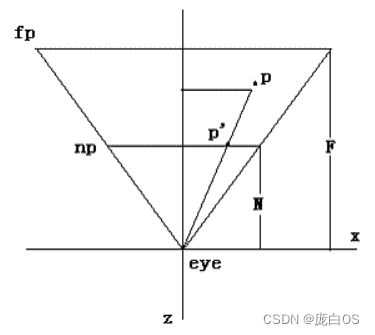
注意一下,这个图,说明齐次空间。


这两步只是简单的几何等比运算。上面是拉伸成-1,1的空间

关于Z,如果要线性插值,就必须是1/z的关系。推导如下:
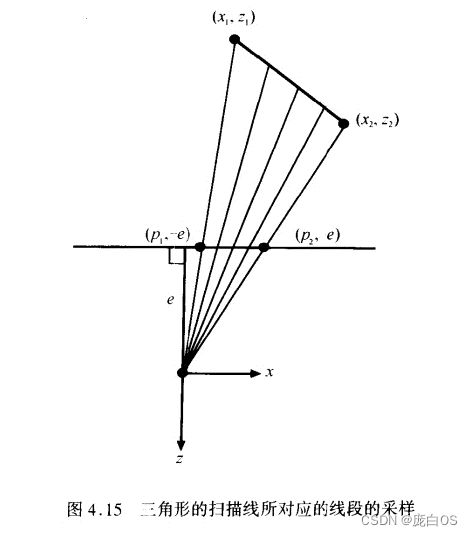


因此,此处的变换也必需是1/z关系,



注意到一点,这个Pz就当w使用了。刚好是一致的。也就是说3维在2维屏幕上投影时,是一个齐次空间,主要是近大远小,其次有了位置信息。因为2维屏幕是容纳不了3维物体的,主个齐次空间可以理解为2D切片,将3维物体进行2D切片,并且近大远小,有一个深度信息。