Python+Pytorch三维点云可视化
1、批量处理txt文件
import numpy as np
f_path=r'C:\Users\Admin\Desktop\shapenetcore_partanno_segmentation_benchmark_v0_normal_new\00000001\10.txt'
with open(f_path) as f:
contents=f.read()
'''print(contents)'''
print(type(contents))
a = contents.split()
'''print(a)'''
a = np.array(a)
a = a.reshape(578628,9)
a = a[:,0:7]
print(a[0,0])
print(type(a ))
f_path=r'C:\Users\Admin\Desktop\shapenetcore_partanno_segmentation_benchmark_v0_normal_new\00000001\10.txt'
with open(f_path, 'w') as f:
'''按列生成矩阵'''
'''np.savetxt(f, np.column_stack(a), fmt='%s')'''
'''按行生成矩阵'''
np.savetxt(f, np.row_stack(a), fmt='%s')
2、路径的读取
1.os.getcwd()
print(" os.getcwd()",os.getcwd())的作用是获取当前文件的路径,和linux的pwd命令一致,其中getcwd()方法不能加参数
os.getcwd() C:\Users\Admin\Desktop\Pointnet2
2.os.path.abspath(args)
os.path.abspath()要加上参数,用法是:在当前的工作目录下追加一个目录
3.拼接目录之os.path.join(ROOT_DIR, “mrcnn”)
os.path.join(ROOT_DIR, “logs”)必须要加上两个参数拼接,其中 ROOT_DIR一般通过os.getcwd()获得。
4.拼接目录之os.path.abspath(“mrcnn”)
os.path.abspath(“mrcnn”)的作用和3中的作用是一致的,但是本人觉得通过os.path.join方法更灵活,因为os.path.abspath(“mrcnn”)方法只能得到一个基于当前目录的路径,而os.path.join(ROOT_DIR, “mrcnn”)中的ROOT_DIR则可以是其他的路径,比如存放图片的路径,存放模型的路径等,先用ROOT_DIR定义,之后再调用。
3、tqdm介绍及常用方法
Tqdm 是一个快速,可扩展的Python进度条,可以在 Python 长循环中添加一个进度提示信息,用户只需要封装任意的迭代器 tqdm(iterator)。
使用pip就可以安装。
使用方法一: tqdm
tqdm(list)方法可以传入任意一种list,比如数组
from tqdm import trange
for i in trange(100):
#do something
pass
使用方法二: trange
trange(i) 是 tqdm(range(i)) 的简单写法
from tqdm import trange
for i in trange(100):
#do something
pass
使用方法三: 手动方法
在for循环外部初始化tqdm,可以打印其他信息
bar = tqdm(["a", "b", "c", "d"])
for char in pbar:
pbar.set_description("Processing %s" % char)
optimizer.zero_grad() 功能
梯度初始化为零,把loss关于weight的导数变成0
Pytorch 中的view函数作用是将张量铺平
4、显示三维点云
需要安装模块:
open3d numpy matplotlib pandas plyfile pyntcloud
单独读取数据集,并在open3d中显示原点云图
注意:要把对应的数据集文件 如:"0.txt"放在对应的代码路径下
import open3d as o3d
import os
import numpy as np
import matplotlib.pyplot as plt
from pandas import DataFrame
from pyntcloud import PyntCloud
point_cloud_raw = np.genfromtxt(r"0.txt", delimiter=" ") # 为 xyz的 N*3矩阵
point_cloud_raw = DataFrame(point_cloud_raw[:,0:3]) # 选取每一列 的 第0个元素到第二个元素 [0,3)
point_cloud_raw.columns = ['x', 'y', 'z'] # 给选取到的数据 附上标题
point_cloud_pynt = PyntCloud(point_cloud_raw) # 将points的数据 存到结构体中
point_cloud_o3d = point_cloud_pynt.to_instance("open3d", mesh=False) # 实例化
o3d.visualization.draw_geometries([point_cloud_o3d]) # 显示原始点云

显示程序2
import open3d as o3d #导入open3d
import numpy as np
import matplotlib as plt
raw_point_cloud_matrix = np.genfromtxt(r"0.txt", delimiter=" ")
raw_point_cloud_matrix = raw_point_cloud_matrix[:,0:3].reshape((-1,3))
# print(raw_point_cloud_matrix)
pcd = o3d.geometry.PointCloud()
pcd.points = o3d.utility.Vector3dVector(raw_point_cloud_matrix)
print(pcd)
o3d.visualization.draw_geometries([pcd])
o3d.visualization.draw_geometries([point_cloud_o3d]) # 显示原始点云
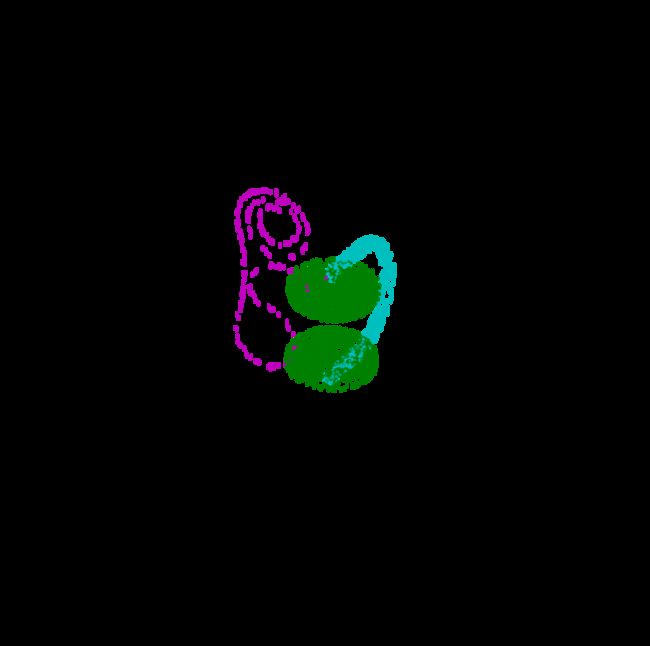
5、使用matplotlib可视化点云分割结果
如何获取分割结果就不再赘述了,这里主要是在获取了分割结果后如何绘制,我是使用的matplotlib库,以ShapeNet为例:
首先设置每个类别的每个部分的颜色映设表:
import copy
import numpy as np
# 每个种类所对应的part类别
lab2seg={'Earphone': [16, 17, 18], 'Motorbike': [30, 31, 32, 33, 34, 35], 'Rocket': [41, 42, 43], 'Car': [8, 9, 10, 11],
'Laptop': [28, 29], 'Cap': [6, 7], 'Skateboard': [44, 45, 46], 'Mug': [36, 37], 'Guitar': [19, 20, 21],
'Bag': [4, 5], 'Lamp': [24, 25, 26, 27], 'Table': [47, 48, 49], 'Airplane': [0, 1, 2, 3], 'Pistol': [38, 39, 40],
'Chair': [12, 13, 14, 15], 'Knife': [22, 23]}
#获取所要绘制点云数据的类别
cls=[]
with open('/results/seg_model_2.txt', 'r') as f:
for i,line in enumerate(f):
ls=line.strip().split()
cls.append(ls[0][1:-2])
#生成颜色映射表
#因为只有几种颜色可选,所以分割结果按这几种颜色随机分配,可以自己改成其他的
map = ['r', 'g', 'b', 'c', 'm', 'y']
#随机生成颜色映射
idx = np.arange(0, len(map))
idx_all = []
np.random.seed(123)
for _ in range(len(lab2seg)):
np.random.shuffle(idx)
idx_all.append(copy.deepcopy(idx))
idx_all = np.array(idx_all)
#将生成的颜色映射表对应到不同种类的part类别上
for i,key in enumerate(lab2seg.keys()):
lab2seg[key]=dict(zip(set(lab2seg[key]),[map[idx_all[i,j]] for j in range(len(set(lab2seg[key])))]))
依据所得到的颜色映射表绘制分割结果
def data_depict(bsize,fn,lab2seg,cls):
#bsize: 数据个数
#fn: 路径
#lab2seg: 生成的颜色对应表,即每个种类的每个part类别所对应的颜色,作为输入是为了使得不同结果间保持一致
#cls: 每个点云数据所对应的类别
for j in range(bsize):
#读取点云和分割结果数据
data= np.loadtxt(fn+'%d.txt'%j).astype(np.float32)
#归一化
data[:,:3]=pc_normalize(data[:,:3])
#将数据点的part类别对应为lab2seg中设置的颜色
colormap = [[] for _ in range(len(data))]
for i in range(len(data)):
colormap[i] = lab2seg[cls[j]][data[i, -1]]
#设置图片大小
plt.figure(figsize=(10,10))
ax = plt.subplot(111, projection='3d')
#设置视角
ax.view_init(elev=30, azim=-60)
#关闭坐标轴
plt.axis('off')
#设置坐标轴范围
ax.set_zlim3d(-1, 1)
ax.set_ylim3d(-1, 1)
ax.set_xlim3d(-1, 1)
ax.scatter(data[:, 0], data[:, 1], data[:, 2], c=colormap, s=20, marker='.') #, cmap='plasma')
# plt.show()
#保存为.eps文件,也可以是其他类型,注意保存不能和显示同时使用
plt.savefig(fn + '%d.eps' % j, dpi=500,bbox_inches='tight',transparent=True)
plt.close()
def pc_normalize(pc):
l = pc.shape[0]
centroid = np.mean(pc, axis=0)
pc = pc - centroid[np.newaxis,:]
m = np.max(np.sqrt(np.sum(np.power(pc,2), axis=1)),axis=0)
pc = pc / m[np.newaxis,np.newaxis]
return pc
import copy
import numpy as np
import matplotlib.pyplot as plt
def pc_normalize(pc):
l = pc.shape[0]
centroid = np.mean(pc, axis=0)
pc = pc - centroid[np.newaxis, :]
m = np.max(np.sqrt(np.sum(np.power(pc, 2), axis=1)), axis=0)
pc = pc / m[np.newaxis, np.newaxis]
return pc
def data_depict(bsize, fn,lab2seg, cls):
# bsize: 数据个数
# fn: 路径
# lab2seg: 生成的颜色对应表,即每个种类的每个part类别所对应的颜色,作为输入是为了使得不同结果间保持一致
# cls: 每个点云数据所对应的类别
for j in range(bsize):
# 读取点云和分割结果数据
data = np.loadtxt(fn + '%d.txt' % j).astype(np.float32)
# 归一化
data[:, :3] = pc_normalize(data[:, :3])
# 将数据点的part类别对应为lab2seg中设置的颜色
colormap = [[] for _ in range(len(data))]
for i in range(len(data)):
colormap[i] = lab2seg[cls[j]][data[i, -1]]
# 设置图片大小
plt.figure(figsize=(10, 10))
ax = plt.subplot(111, projection='3d')
# 设置视角
ax.view_init(elev=30, azim=-60)
# 关闭坐标轴
plt.axis('off')
# 设置坐标轴范围
ax.set_zlim3d(-1, 1)
ax.set_ylim3d(-1, 1)
ax.set_xlim3d(-1, 1)
ax.scatter(data[:, 0], data[:, 1], data[:, 2], c=colormap, s=20, marker='.') # , cmap='plasma')
plt.show()
# 保存为.eps文件,也可以是其他类型,注意保存不能和显示同时使用
plt.savefig(fn + '%d.eps' % j, dpi=500, bbox_inches='tight', transparent=True)
plt.close()
def main():
print('hello1')
# 每个种类所对应的part类别
lab2seg = {'Earphone': [16, 17, 18], 'Motorbike': [30, 31, 32, 33, 34, 35], 'Rocket': [41, 42, 43],
'Car': [8, 9, 10, 11],
'Laptop': [28, 29], 'Cap': [6, 7], 'Skateboard': [44, 45, 46], 'Mug': [36, 37], 'Guitar': [19, 20, 21],
'Bag': [4, 5], 'Lamp': [24, 25, 26, 27], 'Table': [47, 48, 49], 'Airplane': [0, 1, 2, 3],
'Pistol': [38, 39, 40],
'Chair': [12, 13, 14, 15], 'Knife': [22, 23]}
# 获取所要绘制点云数据的类别
cls = []
with open('0.txt', 'r') as f:
for i, line in enumerate(f):
ls = line.strip().split()
cls.append(ls[0][1:-2])
# 生成颜色映射表
# 因为只有几种颜色可选,所以分割结果按这几种颜色随机分配,可以自己改成其他的
map = ['r', 'g', 'b', 'c', 'm', 'y']
# 随机生成颜色映射
idx = np.arange(0, len(map))
idx_all = []
np.random.seed(123)
for _ in range(len(lab2seg)):
np.random.shuffle(idx)
idx_all.append(copy.deepcopy(idx))
idx_all = np.array(idx_all)
# 将生成的颜色映射表对应到不同种类的part类别上
for i, key in enumerate(lab2seg.keys()):
lab2seg[key] = dict(zip(set(lab2seg[key]), [map[idx_all[i, j]] for j in range(len(set(lab2seg[key])))]))
print(lab2seg)
print('hello2')
data = np.loadtxt('0.txt')
data = data.astype(np.float32)
# 归一化
data[:, :3] = pc_normalize(data[:, :3])
# 将数据点的part类别对应为lab2seg中设置的颜色
'''colormap = [[] for _ in range(len(data))]
for i in range(len(data)):
colormap[i] = 'g'
'''
colormap = [[] for _ in range(len(data))]
for i in range(len(data)):
'''colormap[i] = lab2seg[cls[12]][data[i, -1]'''
#print(data[:, 6][0])
if data[:, 6][i] == 0:
colormap[i] = 'g'
elif data[:, 6][i] == 1:
colormap[i] = 'r'
elif data[:, 6][i] == 2:
colormap[i] = 'b'
else:
colormap[i] = 'c'
# 设置图片大小
plt.figure(figsize=(10, 10))
ax = plt.subplot(111, projection='3d')
# 设置视角
ax.view_init(elev=30, azim=-60)
# 关闭坐标轴
plt.axis('off')
# 设置坐标轴范围
ax.set_zlim3d(-1, 1)
ax.set_ylim3d(-1, 1)
ax.set_xlim3d(-1, 1)
ax.scatter(data[:, 0], data[:, 1], data[:, 2], c=colormap, s=20, marker='.') # , cmap='plasma')
plt.show()
# 保存为.eps文件,也可以是其他类型,注意保存不能和显示同时使用
#plt.savefig('%d.eps', dpi=500, bbox_inches='tight', transparent=True)
if __name__ == '__main__':
main()