【创新实训 第四周】 不完全的 CTPN 完结贴 2019.4.11
本周工作进展
经过两周心酸的调试,在省略了回归操作的情况下依旧失败了无数遍,今天我终于跑出了第一个能看的 CTPN 模型。这篇博客就作为我 CTPN 之旅的完结总结,虽然全连接后的分支只剩分类了,虽然文本框合并也没有。
详细工作内容
① 模型设计

首先,输入图片经过 VGG16,长宽缩小到原来 1/16,得到 feature map, 所以 feature map 的一个像素对应原图的 16*16 像素,这也是为什么 anchor 的宽度要固定为 16。
接着,feature map 的每个像素点都取包括周围的九个像素点拼接,每个像素点通道数为 c,则可以拼接成一个 9c 通道数的像素。实际操作中,可以用 1*1 卷积代替。
逐行将新 feature map 的像素输入双向 LSTM,找到 anchor 间水平的序列关系。
每个 feature map 输入全连接层,在分别输出 2k 个分数(最后我只做了这个),2k 个定位,k 个边缘提纯。
# 去掉全连接的 vgg16 网络
def vgg16_no_tail():
# 注意一定要把 include_top 设为 false,
# 否则 input_shape 默认为 224*224,会出错
vgg = keras.applications.VGG16(include_top=False)
vgg_no_tail = keras.Model(
inputs=vgg.input,
outputs=vgg.get_layer("block5_conv3").output)
return vgg_no_tail
# 生成训练模型
def ctpn_model(h=600, w=900, k=10, anchor_size=16):
conv_h = h // anchor_size
conv_w = w // anchor_size
input_layer = vgg16_no_tail(None)
layer = input_layer.output
# 卷积代替
layer = keras.layers.Convolution2D(
512 * 9, (3, 3),
activation='relu',
padding='same',
name='cnn2rnn')(layer)
# 变形,用于找到像素的水平关联
layer = keras.layers.Reshape((-1, 512 * 9))(layer)
# bi-lstm
layer = keras.layers.Bidirectional(
keras.layers.LSTM(128, return_sequences=True))(layer)
# 恢复形状
layer = keras.layers.Reshape((conv_h, conv_w, 256))(layer)
# FC
layer = keras.layers.Convolution2D(512, (1, 1), activation='relu')(layer)
# score
sc_layer = keras.layers.Convolution2D(2 * k, (1, 1), activation='relu')(layer)
# 将最后的维度两两组合
sc_layer = keras.layers.Reshape((conv_h, conv_w, 10, 2))(sc_layer)
# score 要一个 softmax 输出,保证正负分数和为1
sc_layer = keras.layers.Softmax()(sc_layer)
model = keras.Model(inputs=input_layer.input,
outputs=sc_layer)
return model
最后输出的向量的 shape:[batch_size, conv_h, conv_w, anchor_count, 2]。
默认输入 (600, 900) 的图像,每个 feature map 像素10个不同高度的 anchor,则输出 shape 为:[batch_size, 37, 56, 10, 2]。
然后是 loss 函数设计。这里只有 score 的。 y_true 和 y_pred 的 shape 形式都同上。使用交叉熵损失函数。但注意,最终输出的 anchor 数量有1620000个,而包含文本的 anchor 数最多只有上百个,也就是说正负样本是严重失衡的,如果直接把 y_true 和 y_pred 输入binary_crossentropy 可能导致最后模型预测不出任何东西。因此我的做法是将正负样本分开计算 loss。
def ctpn_loss_only_score(y_true, y_pred):
y_pred = tf.multiply(y_true, y_pred)
loss = keras.losses.binary_crossentropy
y_true = tf.reshape(y_true, (-1, 2))
y_pred = tf.reshape(y_pred, (-1, 2))
y_true_pos = y_true[:, 0]
y_true_neg = y_true[:, 1]
y_pred_pos = y_pred[:, 0]
y_pred_neg = y_pred[:, 1]
pos_sum = tf.reduce_sum(y_true_pos) + 1
neg_sum = tf.reduce_sum(y_true_neg) + 1
sum = pos_sum + neg_sum
return sum * loss(y_true_pos, y_pred_pos) / pos_sum + \
sum * loss(y_true_neg, y_pred_neg) / neg_sum
开始模型训练。
def ctpn_model_run():
model = ctpn_model()
# GD 优化器效果比较稳定,原来用的是 Adam,loss 一路飙升完全无法收敛
model.compile(optimizer=tf.train.GradientDescentOptimizer(0.001),
loss=ctpn_loss_only_score,
metrics=['accuracy'])
train_x, train_y, test_x, test_y = load_data()
# x:输入图片的numpy,[n, 600, 900, 3]
# y:对应输出的 feature map 的10个 anchor 的正负分数,[n, 37, 56, 10, 2]
# 一定要保证 train 和 test 的 y 格式一致,不然会报错
time = datetime.datetime.now().strftime('%Y-%m-%d_%H-%M-%S')
model.fit(train_x, train_y, batch_size=4, epochs=50,
validation_data=(test_x, test_y), callbacks=[
keras.callbacks.ModelCheckpoint(
"./model/model_real_only_score_" + time + "_{epoch:02d}-{val_loss:.2f}.hdf5",
monitor='val_loss', verbose=1,
save_best_only=True, period=1),
keras.callbacks.TensorBoard("./model/logs_real_only_score_" + time,
batch_size=4)
])
② 数据集预处理
输入图像一定要处理成固定大小。我通常使用的是 (600, 900) 的大小,产生 label 的格式就是 [batch_size, 37, 56, 10, 2]。
接下来就是照搬我第二周的内容了。
首先参考这篇,将 box 切成 16 像素等宽的 Anchor


到这一步,Anchor 输出格式是 (x_position, y, h) 的列表 :

但是,我们需要处理成和模型输出相同的格式 [batch, h, w, k=10, 4],其中的“4”分别是文字分数、背景分数、纵坐标 y 和高度 h。每16*16像素都需要生成10个 Anchor,高度分别是 [11, 16, 23, 33, 46, 66, 94, 134, 191, 273]。这些 Anchor 中,只有与上图找出的 Anchor 中,横坐标相同且面积交并比大于 0.7 的才能被判定为文字区域。
def overlap_anchors(img, box, anchor_width=16):
iou_threshold = 0.7
anchor_sizes = [11, 16, 23, 33, 46, 66, 94, 134, 191, 273]
anchors = generate_gt_anchor(img, box, anchor_width)
anchors = {x[0]: (x[1], x[2]) for x in anchors}
# print(anchors)
total_anchors = []
for h in range(imgg.shape[0] // anchor_width):
curH = []
total_anchors.append(curH)
for w in range(imgg.shape[1] // anchor_width):
curW = []
curH.append(curW)
for k in range(len(anchor_sizes)):
if w not in anchors:
curW.append([0, 1, 0, 1])
else:
cy, ch = anchors[w]
ty, th = h * anchor_width + anchor_width / 2, anchor_sizes[k]
if iou(cy, ch, ty, th) > iou_threshold:
curW.append([1, 0, ty, th])
else:
curW.append([0, 1, 0, 0])
return total_anchors
def iou(y1, h1, y2, h2):
b1, u1 = y1 - h1 / 2, y1 + h1 / 2
b2, u2 = y2 - h2 / 2, y2 + h2 / 2
if u2 > u1:
b1, u1, b2, u2 = b2, u2, b1, u1
if b1 >= u2:
return 0
else:
if b2 > b1:
return (u2 - b2) / (u1 - b1)
else:
return (u2 - b1) / (u1 - b2)
最终输出的效果:

③ 运行效果


至少该框的都框出来了。不过右边一条是什么玩意?

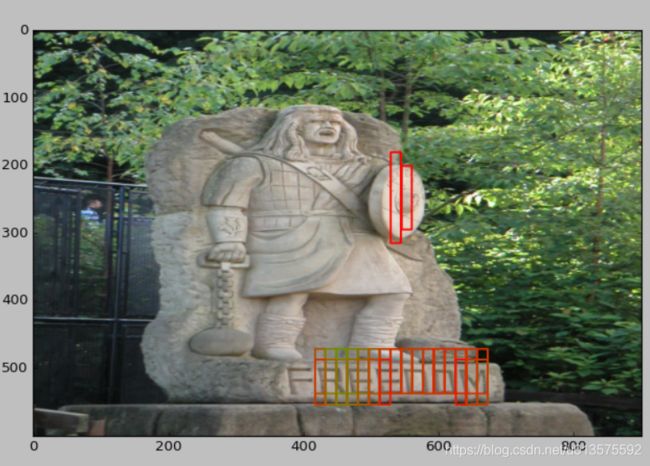
仔细一看盾牌上确实有字 XD


似乎少识别了一行……
下一步计划
尽管对于 CTPN 模型来说目前的状态还不算完整,但我的创新实训的深度学习之旅到这里就要先告一段落了。接下来的时间我要专注与我们项目的手机 APP 和后台的开发了。
