(Unsupervised Anomaly Detection)无监督异常检测领域最新研究进展 - Part 3 基于嵌入的方法(1) 【持续更新...】
文章目录
-
- 前言
- 1. 基于预训练模型
-
- 1.1 SPADE (CVPR2021)
- 1.2 PaDiM(ICPR2020)
- 1.3 PatchCore(2021)
- 1.4 Focus Your Distribution(2021)
- 2. 知识蒸馏(knowledge Distillation)
-
- 2.1 Uninformed Students(CVPR20)
- 2.2 Multiresolution Knowledge Distillation for Anomaly Detection(CVPR21)
前言
异常检测领域中,基于嵌入的方法指的是:将图像送入模型,提取特征,并在特征空间中构造分界面/评分规则。与重构方法的主要不同在于,其不在RGB图像空间而是在高维的特征空间中进行异常检测;与自监督的方法不同,其不过于依赖额外的负样本的构造 / 代理任务的设计,主要考虑的特征空间中的差异。
1. 基于预训练模型
1.1 SPADE (CVPR2021)
SPADE本身不是CVPR的工作,很早就挂在arxiv,但之后一直没有正式发表,最后与其他的创新点结合后在CVPR上发表:
论文:PANDA: Adapting Pretrained Features for Anomaly Detection and Segmentation (以色列,耶路撒冷希伯来大学)
但这篇文章其实跟SPADE方法本身关系不大了,要了解SPADE方法本身的话,最好参考下面这篇文章:
论文:Sub-Image Anomaly Detection with Deep Pyramid Correspondences
原文地址:https://arxiv.org/abs/2005.02357
代码地址:https://github.com/byungjae89/SPADE-pytorch?utm_source=catalyzex.com
SPADE指的是Semantic Pyramid Anomaly Detection,方法本身非常简单,但对于异常定位的效果却异常的好。
SPADE首先在ImageNet预训练的网络对所有正常样本(训练集)都进行特征提取,并存储所有特征(特征池)。在测试时,用同样的网络提取到特征后,在特征池中检索到K个最近的模板特征,利用下式得到异常得分:

对于异常定位任务,需要更精细的像素级特征,因此使用相同的网络(Wide ResNet50x2)得到多层级特征(前3个stage的特征图),将对应位置的特征进行concatenate(编码局部特征和全局特征)作为像素级特征。同样,提取所有正常样本的像素级特征构造特征池。在测试时,对测试样本的每个像素级特征进行KNN索引,计算每个像素点的异常得分,上采样到原图尺寸得到最终的anomaly map:

MVTec 性能: Image-Level AUC:85.5, Pixel-Level AUC:96.5,PRO-score:91.7
优缺点:
- Pros:方法简单,效果好。只使用固定的预训练网络提取特征,无需训练。
- Cons:测试时,时间复杂度与数据量称线性关系,训练采用的正常图像越多,存储的特征也就越多,测试时的KNN复杂度越高。
1.2 PaDiM(ICPR2020)
论文:PaDiM: a Patch Distribution Modeling Framework for Anomaly Detection and Localization
论文地址:https://arxiv.org/pdf/2011.08785.pdf
代码地址:https://github.com/xiahaifeng1995/PaDiM-Anomaly-Detection-Localization-master
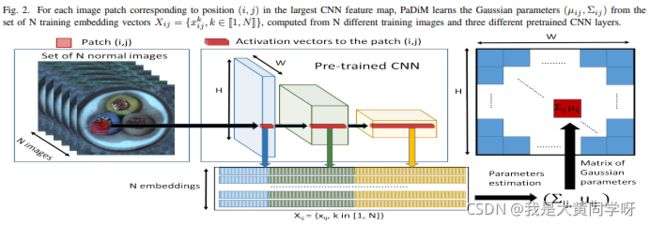
基于SPADE之上,PaDiM主要的改进就是不再构造特征池,执行KNN进行异常检测。而是提取每个位置上的多层级特征(和SPADE一样,concat三个stage的特征),为每个位置上估计一个分布(多元高斯分布)。
"每个位置"指的是(i,j)∈[H,W],
HxW是网络提取的最大特征图的尺寸
具体来说,训练有N张正常图像,那么每个位置上可以收集到N个特征,根据这N个特征估计一个协方差矩阵,构造多元高斯分布。测试时,用同样的网络提取得到一个HxW的特征图,计算每个位置上的特征与对应分布之间的马氏距离,作为该位置的异常得分,从而可以得到Anomaly map。对于图像级的异常得分,选取anomaly map中的最大值。
特征维度越高,估计分布所需的时间就会越长,因此作者也探讨了PCA和random reduce两种降维策略,维持性能的同时,降低了训练时间。
MVTec 性能: Image-Level AUC:95.3, Pixel-Level AUC:97.5,PRO-score:92.1
优缺点
- Pros:引入了训练步骤(估计分布),图像级的异常检测性能得到提升,并且大大减少了测试的复杂度。类似模板匹配的思想:为每个位置构造一个正常模板(分布)。
- Cons:PaDiM为
HxW个位置单独估计分布,而每个位置上的像素并不是严格对齐的,比如screw这一类,每张训练图像的朝向都不一样。
1.3 PatchCore(2021)
论文:Towards Total Recall in Industrial Anomaly Detection (图宾根大学,亚马逊)
论文地址:https://arxiv.org/pdf/2106.08265v1.pdf
代码地址:https://github.com/hcw-00/PatchCore_anomaly_detection
PatchCore主要解决了SPADE测试速度太慢的问题,并且在特征提取部分做了一些探索。

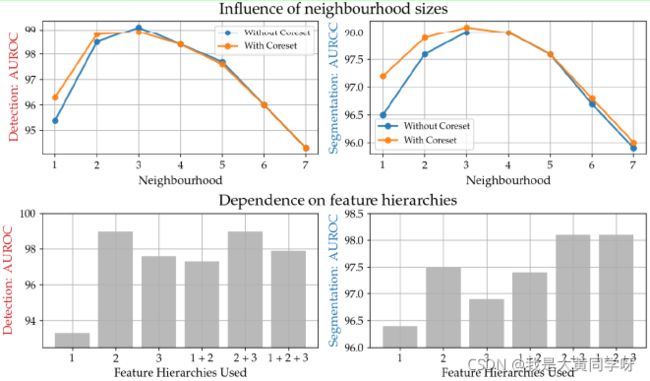
如上图所示,训练阶段只使用stage2、stage3的特征图(SPADE使用了stage1,2,3),但同样使用了多层级特征融合机制。如下图的消融实验所示,使用2+3的操作在检测和定位任务上表现最好。
此外,引入了local neighborhood aggregation操作,其实就是average pooling,实现采用一个窗口大小为3,步长为1,padding为1的AvgPool2d实现,不损失空间分辨率的同时增大感受野。如下图的消融实验所示,引入local neighborhood aggregation操作后,两个任务上都提升了不少性能。(可以提取更深层的特征图来增大感受野,比如引入stage3/4/5的感受野,但这也会损失空间分辨率并且引入更多的ImageNet class bias)。
实验说明,感受野对于异常检测任务来说是非常重要的,但ImagNet预训练的网络在深层会提取到一些高级语义特征,具有ImageNet class bias,不益于异常检测
PatchCore在测试仍然采用KNN来衡量异常得分,为了提升检测效率,作者采用greedy coreset subsampling来选取最具代表性的特征点,缩减特征池的大小。算法流程大致如下,并证明只保留1%也能获得很好的检测性能,但大大缩减了测试时间。

还有一点改进是在计算Image-Level的异常得分时,采用了re-weighting策略,这比直接取max要更鲁棒。详见原文。
MVTec 性能: Image-Level AUC:99.0, Pixel-Level AUC:98.1,PRO-score:93.5 【PatchCore-10%】
优缺点:
- Pros:简单高效,进行了一些结构上的探索,采用
coreset selection优化测试速度 - Cons:思想不够新颖,总体来说是一个较工程化的工作
1.4 Focus Your Distribution(2021)
论文:Focus Your Distribution: Coarse-to-Fine Non-Contrastive Learning for Anomaly Detection and Localization (商汤, PAMI在投)
论文地址:https://arxiv.org/pdf/2110.04538.pdf

SPADE,PaDiM都是使用预训练模型提取特征,而这篇文章会根据异常定位的任务进行fine-tuning。针对PaDiM存在特征不对齐的问题,第一个改进点就是引入STN模块进行粗对齐,如上图所示:
① 图像级的粗对齐(ICA),会额外引入一个L2 loss:

② 特征级的粗对齐(FCA),在预训练网络中的每个stage引入一个STN模块,引导特征图对齐,但这里没有引入额外的损失(只受到Fine Alignment模块的监督)。
关于STN可以参考我的另一篇博客:神经网络中的空间转换模块STN
第二个改进点是执行细粒度对齐,作者借鉴了Simsame网络,采用一种非对比学习(无需负样本)的自监督学习范式来进行特征对齐。网络结构如上图所示,从batch中随机选取两个图片,分别送到两个不对称的分支中,提取特征(其中f是权重共享的),为了防止模型崩塌,采取了stop gradient策略。使用下述loss进行像素级对齐:

算法流程如下所示:

这部分主要是为了缩小HxW个位置上每个分布的内部差异(认为同一位置上的像素级特征应该足够接近),为每个位置编码唯一的表征(encoding a unique vector representation for each position in the feature map, as well as narrowing its distribution for all normal images)。
经过上述训练之后,剩余操作就与PaDiM一致了:将正常图像送入网络提取特征,concat每个位置上不同层级的特征,为每个位置估计分布。测试时,计算每个像素特征与对应分布之间的马氏距离,构造anomaly map。
MVTec 性能: Image-Level AUC:97.7, Pixel-Level AUC:98.2,PRO-score:93.0
优缺点:
- Pros:考虑到了特征对齐的问题,在PaDiM的基础上进一步提升了性能;
- Cons:有些图像本身是无法对齐的,其次从可视化来看,检测效果其实并不是很好,主要得益于评价指标(pixel-level AUCROC,对于小区域的异常很宽容)

2. 知识蒸馏(knowledge Distillation)
2.1 Uninformed Students(CVPR20)
论文:Uninformed Students: Student–Teacher Anomaly Detection with Discriminative Latent Embeddings(MVTec Software GmbH - MVTec AD数据集作者团队)
论文地址:地址太长,直接点就行
这篇文章我之前额外写过一篇博客进行详细技术介绍,因此这里只介绍大体的思路框架,具体技术细节请参照Uninformed Students。

主要的思想如上图所示,利用一个Teacher网络指导多个Student网络进行学习,在测试时,通过比较T网络与S网络之间输出的差异来判断是否异常。【注意:本文的T和S采用相同的网络结构】
训练:训练阶段主要分为Teacher的预训练和Student的学习,训练T网络时需要三个监督:① 知识蒸馏:利用另一个预训练模型中进行蒸馏;② 度量学习:如果预训练模型不好获取,则使用自监督学习进行预训练【triplet loss】;③ 描述符紧凑性:最小化一个batch内的特征描述符相似度来增加紧凑度。
上述的训练均不是在下游任务(
异常检测数据集)上进行的,而是在一个大数据集上进行的,这里作者使用ImageNet
经过上述的过程,就已经获取到了一个富有知识的T网络,可以以此来指导S网络更新。S网络的监督只有一项,如下式所示,计算描述符之间的l2 loss(进行归一化后的)。

此外,为了进行精确的定位,网络采用patch输入,并构造了多尺度的S网络。
测试:测试时,用T和S网络去提取每个像素点对应的patch-level特征描述符,计算两个误差:回归误差(与T输出的差异)和不确定性误差(S之间的输出差异)。
MVTec 性能: PRO-score:85.7(单尺度),91.4(ensemble)
优缺点:
- Pros:引入了多种新技术:知识蒸馏、度量学习等等,并针对pixel AUC存在的问题,提出了一个新的指标用于评价像素级异常定位任务;
- Cons:方法整体上显得很笨重,而且效果也不算好,训练和测试都需要花费较多时间。
2.2 Multiresolution Knowledge Distillation for Anomaly Detection(CVPR21)
论文:Multiresolution Knowledge Distillation for Anomaly Detection(谢里夫科技大学)
原文地址:链接过长,直接点我就行
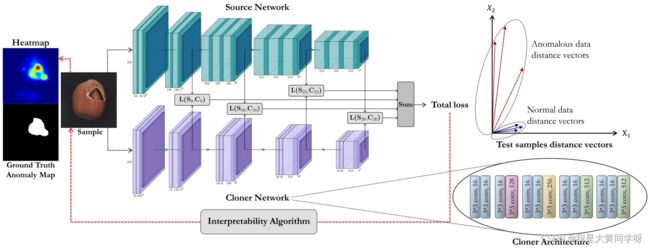
该工作的核心思想同样是知识蒸馏,但相比于上一个工作显得额外清爽。整体框架如上所示,利用一个富有知识的预训练模型Source网络,构造一个轻量级的Cloner网络来模仿S网络的输出。与原始的知识蒸馏只学习最后logits的差异不同,这里会让C学习S中间层的输出,使得C更充分地汲取S的知识,并且有助于异常定位。
训练:输入同一个样本到S和C网络,让C去拟合S网络的中间层特征,所谓的中间层就是不同stage输出的特征(本文使用VGG不同pooling层后的输出)。网络不止特征的value要接近,还控制其direction要一致,因此采用了两个loss进行约束。第一个loss采用欧氏距离约束,使每个像素级特征都要足够接近:
![]()
第二个loss采用余弦距离进行优化,注意这里考虑的是特征图级的余弦距离,其中vec(·)表示flatten操作:

![]()
主要注意的是,与uniform-std不同,这里C比S网络要更轻量,迫使网络去学习更主要的特征,这有助于检测细微的异常(比如MVTec中的screw类,通过实验证明,见原文3.3.2节)。
测试:输入同一张测试图像,通过衡量 L v a l L_{val} Lval和 L v a l L_{val} Lval之间的差异来得到Anomaly Score。为了进行像素级异常定位,利用梯度计算得到attribution map,如下所示:
![]()
此外,为了消除自然噪声的影响,使用高斯滤波 + opening操作(先腐蚀再扩张)进行后处理。

此外,作者还尝试了其他的一些基于梯度的可解释性算法进行实验:
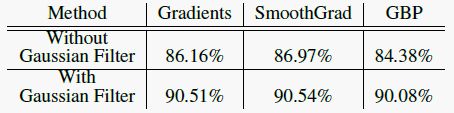
MVTec 性能: Image-Level AUC:87.74, Pixel-Level AUC:90.71
优缺点:
- Pros:相比
uniform-stu,方法显得更加简单。 - Cons:并没有在MVTec AD数据集上与
uniform-stu进行直接对比,并且效果也不算太好。
效果不好的原因可能在于:
S和T对于同一个异常区域的响应也非常像。