3D目标检测SE-SSD 模型工程化复现
3D目标检测SE-SSD 模型工程化复现
3d目标检测se-ssd模型代码偏比赛,记录工程化中的一些问题
1、环境适配
pytorch: 1.7
cuda:10.2
cudnn:8.0
显卡:RTX3090
[se-ssd代码](https://github.com/Vegeta2020/SE-SSD)
[版本适配问题汇总](https://blog.csdn.net/weixin_44316541/article/details/124268113)
2、数据准备
数据集下载
大神链接
数据集准备:
DET3D环境安装
kitti数据集准备
ps(非常重要):
det3d安装好,转化完kitti数据以后,需要删除,通过se-ssd算法环境安装教程重装
模型训练
源代码在cuda block运算会出现越界问题
cd SE-SSD-master/det3d/core/iou3d/src/
修改iou3d_kernel.cu文件,305-323行
__global__ void boxes_iou_bev_kernel(const int num_a, const float *boxes_a, const int num_b, const float *boxes_b, float *ans_iou){
const long long int a_idx = blockIdx.y * THREADS_PER_BLOCK + threadIdx.y;
const long long int b_idx = blockIdx.x * THREADS_PER_BLOCK + threadIdx.x;
if (a_idx >= num_a || b_idx >= num_b){
return;
}
const float * cur_box_a = boxes_a + a_33hangidx * 5;
const float * cur_box_b = boxes_b + b_idx * 5;
float cur_iou_bev = iou_bev(cur_box_a, cur_box_b);
long long int idx = a_idx * num_b + b_idx;
if (idx < 0)
{
printf("idx :%lld \n", idx);
}
ans_iou[idx] = cur_iou_bev;
}
模型推理
摄像机内参校准
大神链接
图像可视化
detections = test(model, calib, img_size, save_dir=None, distributed=distributed) ## 同源代码 result_dict, detections = test(data_loader, model, save_dir=None, distributed=distributed)
out_img = show_image_with_boxes(img, detections[0], calib, show3d=False)
if out_cap is None:
out_cap_h, out_cap_w = out_img.shape[:2]
fourcc = cv2.VideoWriter_fourcc(*'MJPG')
out_cap = cv2.VideoWriter(
os.path.join('/home/video', '{}.avi'.format('se_ssd')),
fourcc, 5, (out_cap_w, out_cap_h))
out_cap.write(out_img)
if out_cap:
out_cap.release()
cv2.destroyAllWindows()
# -- coding: utf-8 --
# @Time : 2022/4/12 14:36
# @Author : lz
import numpy as np
import cv2
def roty(t):
# Rotation about the y-axis.
c = np.cos(t)
s = np.sin(t)
return np.array([[c, 0, s],
[0, 1, 0],
[-s, 0, c]])
def project_to_image(pts_3d, P):
''' Project 3d points to image plane.
Usage: pts_2d = projectToImage(pts_3d, P)
input: pts_3d: nx3 matrix
P: 3x4 projection matrix
output: pts_2d: nx2 matrix
P(3x4) dot pts_3d_extended(4xn) = projected_pts_2d(3xn)
=> normalize projected_pts_2d(2xn)
<=> pts_3d_extended(nx4) dot P'(4x3) = projected_pts_2d(nx3)
=> normalize projected_pts_2d(nx2)
'''
n = pts_3d.shape[0]
pts_3d_extend = np.hstack((pts_3d, np.ones((n, 1))))
# print(('pts_3d_extend shape: ', pts_3d_extend.shape))
pts_2d = np.dot(pts_3d_extend, np.transpose(P)) # nx3
pts_2d[:, 0] /= pts_2d[:, 2]
pts_2d[:, 1] /= pts_2d[:, 2]
return pts_2d[:, 0:2]
def compute_box_3d(obj, P, i):
''' Takes an object and a projection matrix (P) and projects the 3d
bounding box into the image plane.
Returns:
corners_2d: (8,2) array in left image coord.
corners_3d: (8,3) array in in rect camera coord.
'''
# compute rotational matrix around yaw axis
R = roty(obj['rotation_y'][i])
# 3d bounding box dimensions
# l = obj.l
# w = obj.w
# h = obj.h
l = obj['dimensions'][i][0]
w = obj['dimensions'][i][2]
h = obj['dimensions'][i][1]
# 3d bounding box corners
x_corners = [l / 2, l / 2, -l / 2, -l / 2, l / 2, l / 2, -l / 2, -l / 2]
y_corners = [0, 0, 0, 0, -h, -h, -h, -h]
z_corners = [w / 2, -w / 2, -w / 2, w / 2, w / 2, -w / 2, -w / 2, w / 2]
# rotate and translate 3d bounding box
corners_3d = np.dot(R, np.vstack([x_corners, y_corners, z_corners]))
# print corners_3d.shape
corners_3d[0, :] = corners_3d[0, :] + obj['location'][i][0]
corners_3d[1, :] = corners_3d[1, :] + obj['location'][i][1]
corners_3d[2, :] = corners_3d[2, :] + obj['location'][i][2]
# print 'cornsers_3d: ', corners_3d
# only draw 3d bounding box for objs in front of the camera
if np.any(corners_3d[2, :] < 0.1):
corners_2d = None
return corners_2d, np.transpose(corners_3d)
# project the 3d bounding box into the image plane
corners_2d = project_to_image(np.transpose(corners_3d), P)
# print 'corners_2d: ', corners_2d
return corners_2d, np.transpose(corners_3d)
def draw_projected_box3d(image, qs, color=(255, 0, 255), thickness=2):
''' Draw 3d bounding box in image
qs: (8,3) array of vertices for the 3d box in following order:
1 -------- 0
/| /|
2 -------- 3 .
| | | |
. 5 -------- 4
|/ |/
6 -------- 7
'''
qs = qs.astype(np.int32)
for k in range(0, 4):
# Ref: http://docs.enthought.com/mayavi/mayavi/auto/mlab_helper_functions.html
i, j = k, (k + 1) % 4
# use LINE_AA for opencv3
cv2.line(image, (qs[i, 0], qs[i, 1]), (qs[j, 0], qs[j, 1]), color, thickness)
i, j = k + 4, (k + 1) % 4 + 4
cv2.line(image, (qs[i, 0], qs[i, 1]), (qs[j, 0], qs[j, 1]), color, thickness)
i, j = k, k + 4
cv2.line(image, (qs[i, 0], qs[i, 1]), (qs[j, 0], qs[j, 1]), color, thickness)
return image
def show_image_with_boxes(img, objects, calib, show3d=False):
# print('detections:{')
# print(' name:{}'.format(detections[0]['name']))
# print(' truncated:{}'.format(detections[0]['truncated']))
# print(' occluded:{}'.format(detections[0]['occluded']))
# print(' alpha:{}'.format(detections[0]['alpha']))
# print(' bbox:{}'.format(detections[0]['bbox']))
# print(' dimensions:{}'.format(detections[0]['dimensions']))
# print(' location:{}'.format(detections[0]['location']))
# print(' rotation_y:{}'.format(detections[0]['rotation_y']))
# print(' score:{}'.format(detections[0]['score']))
# print(' metadata:{}'.format(detections[0]['metadata']))
# print('}')
img2 = np.copy(img)
for i in range(len(objects['name'])):
box3d_pts_2d, box3d_pts_3d = compute_box_3d(objects, calib['P2'], i)
if box3d_pts_2d is not None:
img2 = draw_projected_box3d(img2, box3d_pts_2d, color=[125, 15, 15])
if show3d:
cv2.imshow("img", img2)
return img2
result
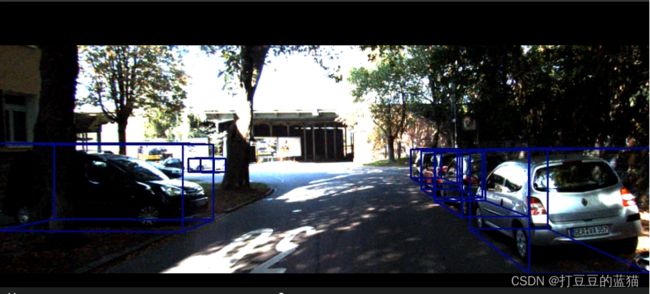
附-雷达点云可视化
# -*- coding: utf-8 -*-
# @Time : 2022/4/1 10:51
# @Author : lz
import os
import numpy as np
import struct
import open3d
def read_bin_velodyne(path):
pc_list = []
# path = 'proprecess/t1.npy'
with open(path, 'rb') as f:
content = f.read()
pc_iter = struct.iter_unpack('ffff', content)
# pc_iter = np.load(path).reshape(-1, 4)
# print('points:{}'.format(pc_iter[0]))
idx_cnt = 0
for idx, point in enumerate(pc_iter):
idx_cnt = idx if idx > idx_cnt else idx_cnt
if idx < 10:
print('points:{}'.format(point))
pc_list.append([point[0], point[1], point[2]])
print('idx_cnt:{}'.format(idx_cnt))
return np.asarray(pc_list, dtype=np.float32)
def main():
# root_dir = 'data(1)'
root_dir = 'val_data' # .bin文件目录
filename = os.listdir(root_dir)
file_number = len(filename)
pcd = open3d.open3d.geometry.PointCloud()
for i in range(file_number):
path = os.path.join(root_dir, filename[i])
print(path)
if path.endswith('bin'):
# if path.endswith('npy'):
example = read_bin_velodyne(path)
# From numpy to Open3D
pcd.points = open3d.open3d.utility.Vector3dVector(example)
open3d.open3d.visualization.draw_geometries([pcd])
if __name__=="__main__":
main()