【CV & Unity】仿射变换原理
什么是仿射变换?
仿射变换(Affine Transformation)是空间直角坐标系的变换,从一个二维坐标变换到另一个二维坐标,仿射变换是一个线性变换,他保持了图像的“平行性”和“平直性”,即图像中原来的直线和平行线,变换后仍然保持原来的直线和平行线,仿射变换比较常用的特殊变换有平移(Translation)、缩放(Scale)、翻转(Flip)、旋转(Rotation)和剪切(Shear)。
线性变换和仿射变换的差别
| 线性变换 | 仿射变换 |
|---|---|
| 变换前是直线的,变换后依然是直线直线比例保持不变变换前是原点的,变换后依然是原点 | 变换前是直线的,变换后依然是直线直线比例保持不变 |
线性变换和仿射变换的差别在原点是否改变
空间变换的两个主要类别
仿射变换

仿射变换:平移、旋转、放缩、剪切、反射
仿射变换的公式表达
( X 2 Y 2 1 ) = [ A 11 A 12 B 11 A 21 A 22 B 12 0 0 1 ] × ( X 1 Y 1 1 ) \left(\begin{array}{c} X_{2} \\ Y_{2} \\ 1 \end{array}\right)=\left[\begin{array}{ccc} A_{11} & A_{12} & B_{11} \\ A_{21} & A_{22} & B_{12} \\ 0 & 0 & 1 \end{array}\right] \times\left(\begin{array}{c} X_{1} \\ Y_{1} \\ 1 \end{array}\right) ⎝ ⎛X2Y21⎠ ⎞=⎣ ⎡A11A210A12A220B11B121⎦ ⎤×⎝ ⎛X1Y11⎠ ⎞
通过上述的矩阵转换可以将图像进行平移、缩放、旋转和剪切,如下图所示

仿射变换在ML机器学习领域的应用
仿射变换的思想在机器学习“图像处理”领域对应单应性矩阵
在三轴坐标中 X Y Z , Z = 1 XYZ,Z=1 XYZ,Z=1这个有点类似于三维的齐次坐标。单应性矩阵主要用来解决两个问题,
- 表述真实世界(Unity中的主世界相机视角)中一个平面与对应它图像的透视变换
- 从通过透视变换实现图像从一种视图变换到另外一种视图

上图的中零点分别表示两个平面中任意两个点,a1、a2与b1、b2是这两点对应的两个方向上的线性向量。对于这两个平面之间的关系,我们可以通过这些点从而一步确定两个平面直接的关系,而两个平面之间的关系用单应性矩阵来描述如下:
p h → = H q ⃗ h ⃗ \overrightarrow{p^{h}}=H \vec{q}^{\vec{h}} ph=Hqh
其中, − p h → , q ⃗ h ⃗ - \overrightarrow{p^{h}},\vec{q}^{\vec{h}} −ph,qh表示三维的齐次坐标向量
这种关系被称为平面单应性。这个当中有一些数学知识推导,这里不做证明,只是明白这个概念怎么来的。
- 此外两个计算机图形学的应用场景分布是纹理渲染与计算平面阴影。
- 用来实现图像拼接时候解决对齐问题
投影变换
( x 1 t x 2 t x 3 t ) = [ h 11 h 12 h 13 h 21 h 22 h 23 h 31 h 32 h 33 ] ( x 1 x 2 x 3 ) \left(\begin{array}{l} x_{1}^{t} \\ x_{2}^{t} \\ x_{3}^{t} \end{array}\right)=\left[\begin{array}{lll} h_{11} & h_{12} & h_{13} \\ h_{21} & h_{22} & h_{23} \\ h_{31} & h_{32} & h_{33} \end{array}\right]\left(\begin{array}{l} x_{1} \\ x_{2} \\ x_{3} \end{array}\right) ⎝ ⎛x1tx2tx3t⎠ ⎞=⎣ ⎡h11h21h31h12h22h32h13h23h33⎦ ⎤⎝ ⎛x1x2x3⎠ ⎞
投影和仿射变换之间的区别
| 投影变换 | 仿射变换 |
|---|---|
| 变换前是直线的,变换后依然是直线直线比例改变变换前平行的两条线,变换后不一定平行 | 变换前是直线的,变换后依然是直线直线比例改变变换前平行的两条线,变换后不一定平行 |
这些仿射变换和投影变换之间的唯一区别在于变换矩阵的最后一行。对于仿射变换,该行的前两个元素为零。这导致操作属性存在以下差异:
-
投影变换不保留平行度、长度和角度。
-
仿射变换与投影变换不同,保留了并行性。
射影变换可以表示为任意四边形(即四点系统)到另一个四边形的变换。仿射变换是三角形的变换。下图说明了这一点:
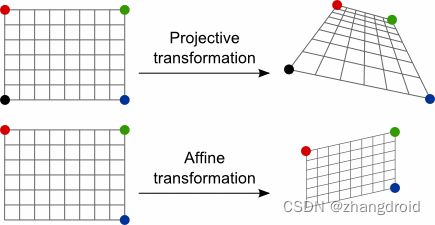
直观的例子:
仿射变换:


仿射变换C#代码实现
在Graphics Mill中应用仿射变换,请执行以下步骤:
-
指定源和目标三角形。
-
使用Matrix.CreateFromAffinePoints(PointF[], PointF[])创建仿射变换矩阵。将先前指定的点作为方法参数传递。
-
使用MatrixTransform.#ctor构造函数创建转换。这里之前创建的矩阵是构造函数的参数。
-
通过调用MatrixTransform.Apply方法应用转换。
using (var bitmap = new Bitmap(@"Images\in.jpg"))
{
System.Drawing.PointF[] source = {
new System.Drawing.PointF(0f, 0f),
new System.Drawing.PointF(0f, 80f),
new System.Drawing.PointF(80f, 0f)
};
System.Drawing.PointF[] target = {
new System.Drawing.PointF(20, 0f),
new System.Drawing.PointF(0f, 80f),
new System.Drawing.PointF(80f, 0f)
};
using (var matrix = Matrix.CreateFromAffinePoints(source, target))
{
using (var transform = new MatrixTransform(matrix))
{
using (var result = transform.Apply(bitmap))
{
result.Save(@"Images\Output\out.jpg");
}
}
}
}
投影变换:
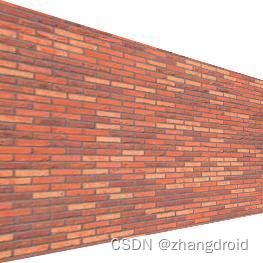
投影变换C#代码实现
在Graphics Mill中应用投影变换,请执行以下步骤:
- 指定源四边形和目标四边形。
- 使用Matrix.CreateFromProjectivePoints(PointF[], PointF[])创建投影变换矩阵。将先前指定的点作为方法参数传递。
- 使用MatrixTransform.#ctor构造函数创建转换。这里之前创建的矩阵是构造函数的参数。
- 通过调用MatrixTransform.Apply方法应用转换。
using (var bitmap = new Bitmap(@"Images\in.jpg"))
{
System.Drawing.PointF[] source = {
new System.Drawing.PointF(0f, 0f),
new System.Drawing.PointF(0f, bitmap.Height),
new System.Drawing.PointF(bitmap.Width, bitmap.Height),
new System.Drawing.PointF(bitmap.Width, 0f)
};
System.Drawing.PointF[] target = {
new System.Drawing.PointF(0f, 0f),
new System.Drawing.PointF(0f, bitmap.Height),
new System.Drawing.PointF(bitmap.Width * 0.75f, bitmap.Height - 50f),
new System.Drawing.PointF(bitmap.Width * 0.75f, 80f)
};
using (var matrix = Matrix.CreateFromProjectivePoints(source, target))
{
using (var transform = new MatrixTransform(matrix))
{
using (var result = transform.Apply(bitmap))
{
result.Save(@"Images\Output\out.jpg");
}
}
}
}
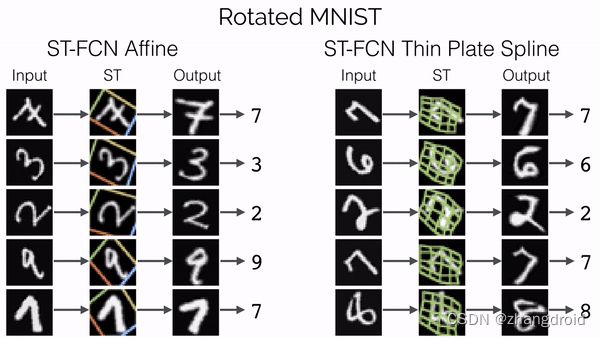
仿射变换在机器学习中的应用
在用CNN模型处理MINST手写数据集的识别中,引入了仿射变换的方法提升了识别准确性
论文:https://arxiv.org/abs/1506.02025
参考资料:
仿射和投影变换 - Graphics Mill
Review: STN — Spatial Transformer Network (Image Classification)
如何通俗地讲解「仿射变换」这个概念? - 马同学的回答 - 知乎