激光雷达和相机联合标定之-but_velodyne_camera
1. 概述
1.该方法适用于相机和激光雷达朝向方向相同或者近似相同的状态,相机和激光雷达之间的R矩阵较小,主要标定误差为T矩阵。 /ps:可以先将激光雷达旋转到与相机安装坐标系相似的世界坐标系下,再使用该方法进行标定。/
2.该方法分为两个主要步骤,T矩阵标定;R|T矩阵联合标定
3.其中T矩阵标定基于相机的小孔成像原理中,世界坐标系下物体与像素坐标系之间的相似三角形关系获得。
4.R|T矩阵联合标定通过在小范围内迭代求解获得。
2.T矩阵标定
2.1 图像特征圆提取
2.1.1 边缘检测
源代码中提供了3种不同的边缘检测算法:
- sobel边缘检测
cv::Mat ImageEdge::computeEdgeImage()
{
cv::Mat gray_img;
if(this->m_img.channels()>1)
{
gray_img = cv::Mat(this->m_img.size(), CV_8UC1);
cv::cvtColor(this->m_img, gray_img, CV_BGR2GRAY);
}
else
{
this->m_img.copyTo(gray_img);
}
cv::Mat edges;
cv::Mat grad_x, grad_y;
cv::Mat abs_grad_x, abs_grad_y;
cv::Sobel(gray_img, grad_x, CV_16S, 1, 0, 3);
cv::convertScaleAbs(grad_x, abs_grad_x);
cv::Sobel(gray_img, grad_y, CV_16S, 0, 1, 3);
cv::convertScaleAbs(grad_y, abs_grad_y);
cv::addWeighted(abs_grad_x, 0.5, abs_grad_y, 0.5, 0, edges);
if(m_write_img)
{
cv::imwrite(m_imgsave_path+"/edge_img.jpg",edges);
}
return edges;
}
- 自适应阈值分割检测
cv::Mat ImageEdge::segmetation()
{
cv::Mat src_gray;
if(this->m_img.channels() > 1)
{
cv::cvtColor(m_img, src_gray, CV_BGR2GRAY);
}
else
{
src_gray = m_img;
}
cv::resize(src_gray, src_gray, cv::Size(src_gray.rows, src_gray.cols));
cv::Mat seg;
cv::adaptiveThreshold(src_gray, seg, 1, CV_ADAPTIVE_THRESH_GAUSSIAN_C,
CV_THRESH_BINARY, 7 , 5);
if(m_write_img)
{
cv::imwrite(m_imgsave_path+"/segment.jpg",seg*255);
}
return seg;
}
- IDT边缘检测–未完全理解
cv::Mat ImageEdge::computeIDTEdgeImage(cv::Mat& edge_img)
{
cv::Mat edges;
edge_img.convertTo(edges, CV_32FC1);
cv::Mat default_edges = edges;
cv::Mat weights = cv::Mat::ones(edges.size(), CV_32FC1);
cv::Mat new_weights = cv::Mat::ones(edges.size(), CV_32FC1);
cv::Mat new_edges = cv::Mat::zeros(edges.size(), CV_32FC1);
int weights_middle = m_distance_weights.cols/2;
for(int rows_cols = 0; rows_cols <2; rows_cols++)
{
int width = edges.cols;
for(int row =0; row <edges.rows; row++)
{
for(int x=0;x<edges.cols;x++)
{
cv::Mat sub_weights;
cv::min(m_distance_weights(cv::Rect(weights_middle - x, 0, width, 1)),
weights.row(row), sub_weights);
cv::Mat edges_row = edges.row(row);
cv::Mat sub_res = sub_weights.mul(edges_row);
double max;
cv::Point max_loc;
cv::minMaxLoc(sub_res, nullptr, &max, nullptr, &max_loc);
new_edges.at<float>(row, x) = max;
new_weights.at<float>(row, x) = sub_weights.at<float>(max_loc.x);
}
}
new_edges = new_edges.t();
new_weights = new_weights.t();
edges = new_edges;
weights = new_weights;
}
cv::Mat idt_edge_img = new_edges.mul(new_weights);
cv::addWeighted(default_edges, m_alpha, idt_edge_img, (1.0 - m_alpha), 0.0, idt_edge_img);
cv::normalize(idt_edge_img, idt_edge_img, 0.0, 1.0, cv::NORM_MINMAX);
cv::threshold(idt_edge_img, idt_edge_img, 0.5,1.0, 0);
cv::Mat element = cv::getStructuringElement(cv::MORPH_RECT, cv::Size(5,5));
cv::dilate(idt_edge_img, idt_edge_img, element);
if(m_write_img)
{
cv::imwrite(m_imgsave_path+"/idt_edge_img.jpg", idt_edge_img.mul(cv::Scalar::all(255.0)));
}
return idt_edge_img;
}
基于三种不同的边缘检测算法,获得的边缘检测图如下:
row_image
 sobel边缘检测
sobel边缘检测
 idt边缘检测
idt边缘检测
 自适应阈值分割边缘检测
自适应阈值分割边缘检测

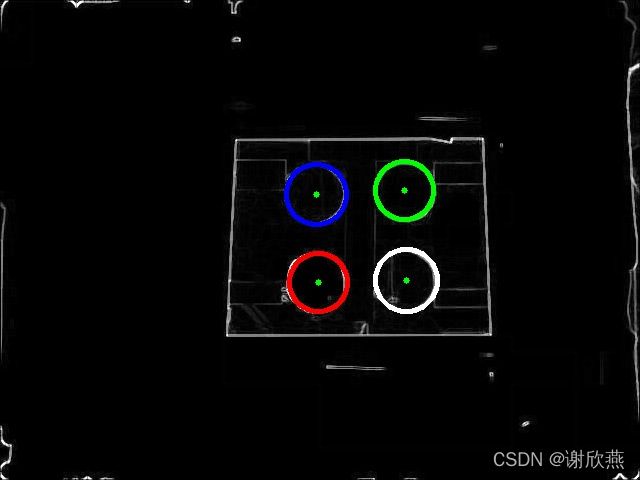
2.1.2 边缘检测图中4个特征圆检测-houghcircle检测
bool ImageEdge::detect4Circles(float canny_thresh, float center_thresh,
std::vector<cv::Point2f> ¢ers,
std::vector<float> &radiuses)
{
std::vector<cv::Vec3f> circles;
radiuses.clear();
centers.clear();
cv::Mat src_gray;
src_gray = this->m_img.clone();
for(int thresh = canny_thresh; circles.size()<4 && thresh>10; thresh -= 5)
{
cv::HoughCircles(src_gray, circles, CV_HOUGH_GRADIENT, 1, src_gray.rows/8, canny_thresh, thresh, 0, 0);
// std::cout<
}
if(circles.size() < 4)
{
return false;
}
std::sort(circles.begin(), circles.end(), order_Y);
std::sort(circles.begin(), circles.begin() + 2, order_X);
std::sort(circles.begin()+2, circles.begin() +4, order_X);
for(size_t i =0; i< circles.size(); i++)
{
centers.push_back(cv::Point2f(circles[i][0], circles[i][1]));
radiuses.push_back(cvRound(circles[i][2]));
}
if(m_write_img)
{
cv::Mat src_rgb;
cv::cvtColor(src_gray, src_rgb, cv::COLOR_GRAY2BGR);
std::vector<cv::Scalar> colors;
colors.push_back(cv::Scalar(255,0,0));
colors.push_back(cv::Scalar(0,255,0));
colors.push_back(cv::Scalar(0,0,255));
colors.push_back(cv::Scalar(255,255,255));
for (size_t i = 0; i < circles.size(); i++)
{
cv::Point center(cvRound(circles[i][0]), cvRound(circles[i][1]));
int radius = cvRound(circles[i][2]);
cv::circle(src_rgb, center, 3, cv::Scalar(0, 255, 0), -1, 8, 0);
cv::circle(src_rgb, center, radius, colors[i], 3, 8, 0);
// std::cout << i+1 << ". circle S("<}
cv::imwrite(m_imgsave_path+"/4_circles_img.jpg", src_rgb);
}
return true;
}
检测效果图
2.2 基于ransac的激光点云圆特征检测
2.2.1 方案重点
- 本方案中需要由于算法中需要按圈计算点云的边界点,因此首先计算激光点云获取的每个点的激光线束,比如本例中使用的是速腾的太阳神32线激光雷达,首先需要通过激光雷达的线束计算公式,计算出每个点的线束。
int getRow32(const float ver_ang)
{
int row=-1;
if(ver_ang <-9.0)
{
row = std::round((ver_ang+1.0)/3.0+18.0);
}
else if(ver_ang >6.2)
{
row = std::round((ver_ang+1.0)/2.0+23.0);
}
else if(ver_ang<=-7.5)
{
row = std::round(ver_ang/2.0 + 20.0);
}
else if(ver_ang>4.8 && ver_ang <=6.2)
{
row=26;
}
else {
row = std::round(ver_ang/1.33 + 22);
}
if(row<0 || row>32-1)
{
row = -1;
}
return row;
}
其中pcl定义新数据类型方法如下:
struct Point
{
PCL_ADD_POINT4D;
float intensity;
uint16_t ring;
float range;
EIGEN_MAKE_ALIGNED_OPERATOR_NEW // ensure proper alignment
// PCL_MAKE_ALIGNED_OPERATOR_NEW
}EIGEN_ALIGN16;
POINT_CLOUD_REGISTER_POINT_STRUCT(Point,
(float, x, x)
(float, y, y)
(float, z, z)
(float, intensity, intensity)
(uint16_t, ring, ring))
- 点云的坐标系为,垂直于激光雷达发射面,沿着行人行走的方向为Z轴,垂直于Z轴的水平方向为x轴,高度方向为y轴。
- 基于相机的内参,判断存在于点云内部的点
pcl::PointCloud<Point> visible_cloud;
this->project(projection_matrix, cv::Rect(0, 0, image_width, image_height), &visible_cloud);
PointCloudEdge visible_scan(visible_cloud);
2.2.2 检测步骤
- 边缘检测
基于单圈内相邻点的距离差,计算该点是否为突变点,在同一平面上的点,相差为0,两个平面的边缘线处,相邻点距离差较大。然后对计算的差值进行归一化。
void PointCloudEdge::intensityByDiff(Processing processing)
{
std::vector<std::vector<Point*>> rings = getRings();
for(std::vector<std::vector<Point*>>::iterator ring = rings.begin();
ring< rings.end(); ring++)
{
Point* prev, *next;
if(ring->empty())
{
continue;
}
(*ring->begin())->intensity = 0;
(*(ring->end()-1))->intensity = 0;
for(std::vector<Point*>::iterator pt=ring->begin()+1; pt<ring->end()-1; pt++)
{
prev = *(pt-1);
next = *(pt+1);
switch(processing)
{
case Processing::DISTORTIONS:
(*pt)->intensity = std::max(std::max(prev->range-(*pt)->range,
next->range-(*pt)->range),float(0));
break;
case Processing::INTENSITY_EDGES:
(*pt)->intensity = std::max(std::max(prev->intensity-(*pt)->intensity,
next->intensity-(*pt)->intensity),float(0));
break;
default:
std::cout<<"Velodyne processing unknown."<<std::endl;
exit(1);
}
}
}
normalizeIntensity(0.0, 1.0);
}
/ps:基于此,本例中标定板需要在一个较大的固定的墙面前面,从而减少其他建筑物的边缘影像,或者选择指定区域检测标定板的边缘/
- 基于ransac的平面拟合
pcl::SampleConsensusModelPlane<pcl::PointXYZI>::Ptr model_p(
new pcl::SampleConsensusModelPlane<pcl::PointXYZI>(xyz_cloud));
pcl::RandomSampleConsensus<pcl::PointXYZI> ransac(model_p);
ransac.setDistanceThreshold(0.1);
ransac.computeModel();
std::vector<int> inliers_indicies;
ransac.getInliers(inliers_indicies);
pcl::copyPointCloud<pcl::PointXYZI>(*xyz_cloud, inliers_indicies, m_plane);
- 基于ransac的标定板边缘线删除-消除边缘线对圆环检测的影响,或者制作边缘线与特征圆距离较远的标定板
// for(int i=0;i<2;i++)
// {
// pcl::PointCloud::Ptr plane_ptr(
// new pcl::PointCloud(m_plane));
// pcl::SampleConsensusModelLine::Ptr model_l(
// new pcl::SampleConsensusModelLine(plane_ptr));
// pcl::RandomSampleConsensus ransac_l(model_l);
// ransac_l.setDistanceThreshold(0.02);
// ransac_l.computeModel();
// std::vector line_inliers;
// ransac_l.getInliers(line_inliers);
// if(line_inliers.empty())
// {
// continue;
// }
// pcl::PointCloud plane_no_line;
// removeLines(*plane_ptr, line_inliers, plane_no_line);
// m_plane=plane_no_line;
// }
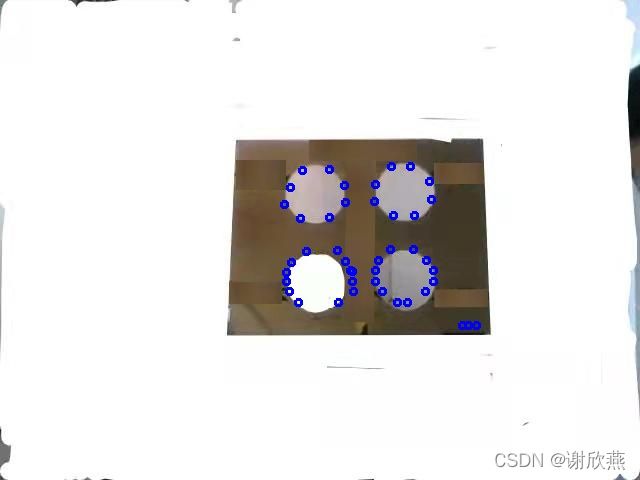
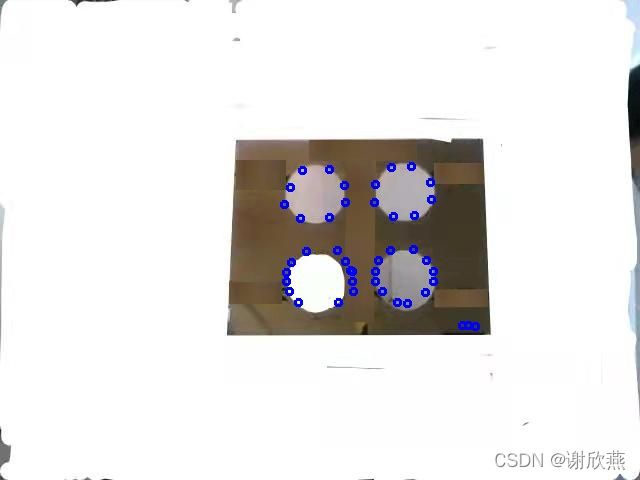
- 基于ransac的特征圆检测
radiuses.clear();
std::vector<pcl::PointXYZ> centers;
std::vector<int> inliers_indicies;
pcl::PointCloud<pcl::PointXYZ> *four_spheres=new pcl::PointCloud<pcl::PointXYZ>();
float tolerance = 0.08;
for(int i=0;i<4;i++)
{
pcl::SampleConsensusModelSphere<pcl::PointXYZI>::Ptr model_s(
new pcl::SampleConsensusModelSphere<pcl::PointXYZI>(plane));
// std::cout<<0.85*m_circle_radius<<" "<<1.15*m_circle_radius<
model_s->setRadiusLimits(0.85*m_circle_radius, 1.15*m_circle_radius);
pcl::RandomSampleConsensus<pcl::PointXYZI> ransac_sphere(model_s);
ransac_sphere.setDistanceThreshold(tolerance);
ransac_sphere.computeModel();
inliers_indicies.clear();
ransac_sphere.getInliers(inliers_indicies);
if(inliers_indicies.size() == 0)
{
continue;
}
Eigen::VectorXf coeficients;
ransac_sphere.getModelCoefficients(coeficients);
// std::cout<
pcl::PointCloud<pcl::PointXYZI>::Ptr outliers(new pcl::PointCloud<pcl::PointXYZI>);
pcl::PointCloud<pcl::PointXYZI>::Ptr inliers(new pcl::PointCloud<pcl::PointXYZI>);
removeLines<pcl::PointXYZI>(*plane, inliers_indicies, *outliers);
pcl::copyPointCloud<pcl::PointXYZI>(*plane, inliers_indicies, *inliers);
plane = outliers;
// std::cout<points.size();
for(int i=0;i<inliers->points.size();i++)
{
pcl::PointXYZ p;
p.x = inliers->points[i].x;
p.y = inliers->points[i].y;
p.z = inliers->points[i].z;
four_spheres->points.push_back(p);
}
pcl::PointXYZ middle(coeficients(0), coeficients(1), coeficients(2));
four_spheres->push_back(middle);
centers.push_back(middle);
float radius = coeficients(3);
radiuses.push_back(radius);
}
// PointCloud::Ptr four_spheres_ptr(four_spheres);
return centers;
- 特征圆验证
bool PointCloudEdge::verify4Spheres(const std::vector<pcl::PointXYZ>& spheres_centers, float straight_distance, float delta)
{
std::vector<std::pair<int, int>> near_indexes;
near_indexes.push_back(std::pair<int, int>(0,1));
near_indexes.push_back(std::pair<int, int>(1,3));
near_indexes.push_back(std::pair<int, int>(3,2));
near_indexes.push_back(std::pair<int, int>(2,0));
bool res = true;
for(std::vector<std::pair<int, int>>::iterator ne=near_indexes.begin();ne<near_indexes.end();ne++)
{
float error = std::abs(
euclidDist(spheres_centers[ne->first], spheres_centers[ne->second]) - straight_distance);
// std::cout<
if(error>delta)
res=false;
}
return res;
}
2.3 基于相机特征圆与特征圆半径和点云特征圆与特征圆半径的T矩阵计算
整体思路为
1.z/3d_r = f/3d_r – 计算translation_z
2.x/f=x3/z --计算translation_x
3.y/f=y3/z --计算translation_y
Calibration6DoF Calibration::findTranslation(
std::vector<cv::Point2f> image, std::vector<cv::Point3f> velodyne,
cv::Mat projection, float radius2D, float radius3D)
{
std::vector<float> translation(3, 0);
enum INDEX
{
X=0, Y=1, Z=2
};
float focal_len = projection.at<float>(0,0);
// std::cout<
translation[INDEX::Z] = radius3D*focal_len/radius2D-velodyne.front().z;
float principal_x = projection.at<float>(0,2);
float principal_y = projection.at<float>(1,2);
for(size_t i=0; i<image.size(); i++)
{
translation[INDEX::X] += (image[i].x - principal_x)
* (velodyne[i].z + translation[INDEX::Z]) / focal_len - velodyne[i].x;
translation[INDEX::Y] += (image[i].y - principal_y)
* (velodyne[i].z + translation[INDEX::Z]) / focal_len - velodyne[i].y;
}
translation[INDEX::X] /= image.size();
translation[INDEX::Y] /= image.size();
return Calibration6DoF(translation[INDEX::X], translation[INDEX::Y], translation[INDEX::Z], 0, 0, 0, 0);
}
3.R-T矩阵联合标定
通过小范围内像素级匹配,获得匹配后的相似度,不断跌倒计算最优值
void Calibration::calibrationRefinement(
ImageEdge img, PointCloudEdge scan, cv::Mat P,
float x_rough, float y_rough, float z_rough,
float max_translation, float max_rotation, unsigned steps,
Calibration6DoF &best_calibration, Calibration6DoF &average)
{
img = ImageEdge(img.computeIDTEdgeImage());
float x_min = x_rough - max_translation;
float y_min = y_rough - max_translation;
float z_min = z_rough - max_translation;
float x_rot_min = - max_rotation;
float y_rot_min = - max_rotation;
float z_rot_min = - max_rotation;
float step_transl = max_translation*2/(steps -1);
float step_rot = max_rotation*2/(steps-1);
PointCloudEdge transformed = scan.transform(x_rough, y_rough, z_rough, 0, 0, 0);
float rough_val = Similarity::edgeSimilarity(img, transformed, P);
std::cout<<rough_val<<std::endl;
best_calibration.set(x_rough, y_rough, z_rough, 0, 0, 0, rough_val);
int counter = 0;
int cnt = 0;
int counter_best = 0;
float x=x_min;
for(size_t xi=0;xi<steps;xi++)
{
float y=y_min;
for(size_t yi=0; yi<steps; yi++)
{
float z=z_min;
for(size_t zi=0; zi<steps; zi++)
{
float x_r = x_rot_min;
for(size_t x_ri=0; x_ri<steps; x_ri++)
{
float y_r = y_rot_min;
for(size_t y_ri=0; y_ri<steps; y_ri++)
{
float z_r = z_rot_min;
for(size_t z_ri=0; z_ri<steps; z_ri++)
{
PointCloudEdge transformed = scan.transform(x,y,z,x_r,y_r,z_r);
float value = Similarity::edgeSimilarity(img, transformed, P);
Calibration6DoF calibration(x,y,z,x_r,y_r,z_r,value);
if(value>best_calibration.value)
{
best_calibration.set(x,y,z,x_r,y_r,z_r,value);
counter_best++;
cv::Mat final_img = img.getImage().clone();
for(pcl::PointCloud<Point>::iterator pt = transformed.begin(); pt<transformed.end(); pt++)
{
cv::Point xy=PointCloudEdge::project(*pt, P);
cv::circle(final_img, cv::Point2d(xy.x,xy.y), 3,cv::Scalar(255,0,0),2,8);
}
std::string filename = "./img_refo/"+std::to_string(counter_best++)+"_"+std::to_string(value)+"_mid.jpg";
cv::imwrite(filename, final_img);
}
// cv::Mat final_img = img.getImage().clone();
// for (::pcl::PointCloud::iterator pt = transformed.begin(); pt < transformed.end(); pt++)
// {
// cv::Point xy = Velodyne::Velodyne::project(*pt, P);
// cv::circle(final_img, cv::Point2d(xy.x,xy.y), 3,cv::Scalar(255,0,0),2,8);
// }
// std::string filename = "/home/xxy/xxy/202202/ros_test/img/"+std::to_string(cnt++)+"_"+std::to_string(value)+"_mid.jpg";
// cv::imwrite(filename, final_img);
if (value > rough_val)
{
average += calibration;
counter++;
cout << counter << ".\t";
calibration.print();
}
z_r += step_rot;
}
y_r += step_rot;
}
x_r += step_rot;
}
z+= step_transl;
}
y+= step_transl;
}
x+= step_transl;
}
if(counter==0)
average=best_calibration;
else {
average /= counter;
}
}
相似性度量
float static edgeSimilarity(ImageEdge &img, PointCloudEdge &scan, cv::Mat &P)
{
cv::Point2i m_point_topleft= cv::Point2i(250,120);
cv::Point2i m_point_bottomright= cv::Point2i(500,360);
cv::Rect frame(cv::Point(0,0), img.size());
float CC=0;
for(pcl::PointCloud<Point>::iterator pt = scan.begin(); pt < scan.end(); pt++)
{
cv::Point xy = PointCloudEdge::project(*pt, P);
// std::cout<
if(xy.inside(frame)
&& xy.x > m_point_topleft.x && xy.x < m_point_bottomright.x
&& xy.y > m_point_topleft.y && xy.y < m_point_bottomright.y)
{
// std::cout<intensity<<" ";
assert(xy.x < 640);
CC+= img.at(cv::Point2d(xy.x, xy.y))*pt->intensity;
}
}
return CC;
}
4. 标定结果
4.1 最佳结果
4.2 平均结果
5. 利用4个circle的中心点使用opencvSolvePnp求解
cv::Mat rotM, rvec, tvec;
double camD[9] = {569.1916852916451, 0, 389.2369196593608,
0, 562.7606749808537, 205.39889751999,
0, 0, 1};
double distCoeffD[5] = {0.1220090645915436, -0.07107613516559942, -0.009396424500619524, 0.05404222930344704, 0.07256047312087824};
// cv::Rodrigues(rotM, rvec);
cv::Mat distortion_coefficients = cv::Mat(5, 1, CV_64FC1, distCoeffD);
cv::Mat camera_matrix = cv::Mat(3,3,CV_64FC1,camD);
cv::solvePnP(centers3d,centers2d,camera_matrix, distortion_coefficients,rvec, tvec);
cv::Rodrigues(rvec, rotM);
std::cout<<"rotation matrix: "<<std::endl<<rotM<<std::endl<<rvec<<std::endl;
std::cout<<"translation matrix: "<<std::endl<<tvec<<std::endl;
cv::Mat final_img3=g_img.clone();
// std::cout<
// std::cout<
std::cout<<tvec.at<double>(0,0)<<" "<<tvec.at<double>(1,0)<<" "<<tvec.at<double>(2,0)
<<" "<<rvec.at<double>(0,0)<<" "<<rvec.at<double>(1,0)<<" "<<rvec.at<double>(2,0)<<std::endl;
PointCloudEdge transformed3 = pointcloud_tmp.transform(tvec.at<double>(0,0),tvec.at<double>(1,0),tvec.at<double>(2,0),
rvec.at<double>(0,0), rvec.at<double>(1,0), rvec.at<double>(2,0));
for (pcl::PointCloud<Point>::iterator pt = transformed3.begin(); pt < transformed3.end(); pt++)
{
cv::Point xy = PointCloudEdge::project(*pt, projection_matrix);
if (xy.inside(frame))
{
cv::circle(final_img3, cv::Point2d(xy.x,xy.y), 3,cv::Scalar(255,0,0),2,8);
}
}
cv::imwrite("./final_img_pnp.jpg",final_img3);
5.1 solvePnp 标定结果

6. but_veldyne 和solvepnp标定参数对比
T_0,T_1,T_2,R_0,R_1,R_2
- but_velodyne_avg
-0.537792,0.339281,0.625459,0,0,-0.0075 - but_velodyne_best
-0.537792,0.339281,0.625459,0,0,-0.01 - solvepnp
-1.02459,0.486016,0.571471,0.065575,0.224808,-0.0162254
但从结果看,差异还是挺大的,但是投影结果差异比较小