Moveit!入门——古月居机械臂开发笔记(二)
Moveit!入门——古月居机械臂开发笔记(二)
- 引言
- ROS机械臂开发_机器视觉与物体抓取
-
- 1、ROS中的运动学插件
- 2、Moveit!碰撞检测
-
- 规划场景
- 3、Pick and Place
- 4、ROS中的机器视觉
-
- ROS中的图像数据
- 摄像头标定
- ROS+OpenCV
- ORK(Object Recognition Kitchen)
- 5、Moveit!视觉集成
- 后记
引言
接上次笔记(一)Moveit!和机械臂控制,这一次主要为:ROS机械臂开发_机器视觉与物体抓取。
ROS机械臂开发_机器视觉与物体抓取
1、ROS中的运动学插件
参考https://www.guyuehome.com/1921
在Moveit!setup assistant配置中会选择一个运动学求解器,用于运动学反解。
KDL:

很多点求解不出来,求解时间过长,i7处理器,一个姿态求解时间大概在0.01s-0.1s。
TRAC_IK:
求解速度和求解成功率均高于KDL。但是TRAC-IK也有问题,它是一种数值算法,每次求解得到的关节位置不一定相同。
使用方法——ROS的软件源中已经集成了TRAC-IK的安装包,可以直接使用以下命令安装:
sudo apt-get install ros-melodic-trac-ik-kinematics-plugin
然后修改机械臂MoveIt!配置功能包下的kinematics.yaml文件就可以使用啦:
kinematics_solver: trac_ik_kinematics_plugin/TRAC_IKKinematicsPlugin
kinematics_solver_attempts: 3
kinematics_solver_search_resolution: 0.005
kinematics_solver_timeout: 0.05
此时运行配置功能包中的demo.launch使用的就是TRAC_IK求解器了。
IKFAST
IKFAST是一种基于解析算法的运动学插件,可以保证每次求解的一致性。相比KDL和TRAC-IK,IKFAST的安装过程就比较复杂了,不过就笔者的使用经验来讲,IKFAST的效果还是很推荐的,所以不妨一试,
Moveit官方教程配置方法

2、Moveit!碰撞检测
规划场景
这一块即指在场景中添加障碍物体,在规划轨迹时考虑避障。需要我们做的不多,只需要添加物体,规划是自动进行的。
注:这里我理解的添加障碍物体是在Moveit!中添加,让其知道环境中有这么一个物体。而gazebo是仿真世界,在gazebo中的模型Moveit!不会主动避障,即需要3D sensors来做实时避障。
在上一篇笔记中提到的轨迹约束中的运动规划器,使用OMPL中的算法。OMPL (Open Motion Planning Library) 是一个开源的运动规划库,主要是执行随机规划器。MoveIt直接整合OMPL,使用其库里的运动规划器作为主要/默认的一套规划器。
Moveit!内部实现方法——Moveit!中有一个重要的功能模块叫规划场景监听器。
这一块均参考https://www.guyuehome.com/17370
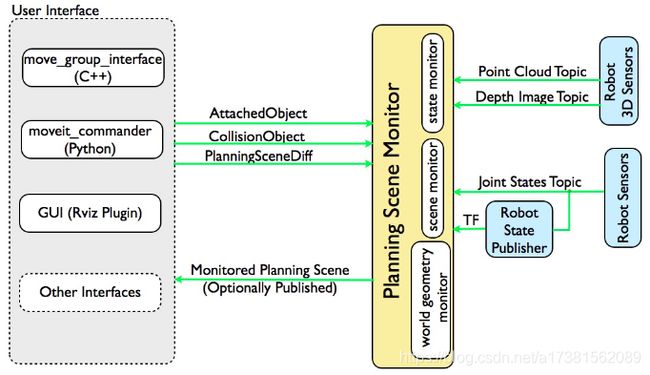
可以通过RVIZ(Publish Scene)来往场景添加物体,也可以通过编程(Moveit官方教程中有),还可以用ROBOT 3D Sensors实时检测场景中的障碍物。

同时Moveit!也可以做到将被抓取物体纳入避障规划。

3、Pick and Place
- 创建抓取的目标物体(已知物体的位置)
- 设置目标物体的放置位置
- 生成抓取姿态(生成一系列姿态,姿态之间轻微变化,防止无法求解)
# 将目标位置设置为机器人的抓取目标位置
grasp_pose = target_pose
# 生成抓取姿态
grasps = self.make_grasps(grasp_pose, [target_id])
# 将抓取姿态发布,可以在rviz中显示
for grasp in grasps:
self.gripper_pose_pub.publish(grasp.grasp_pose)
rospy.sleep(0.2)
- Pick:
# 追踪抓取是否成功, 以及抓取的尝试次数
result = None
n_attempts = 0
# 重复尝试抓取,直到成功或超过最大尝试次数
while result != MoveItErrorCodes.SUCCESS and n_attempts < max_pick_attempts:
n_attempts += 1
rospy.loginfo('Pick attempt:' + str(n_attempts))
result = arm.pick(target_id, grasps) # 上层的接口,类似arm.plan, arm.go类似
rospy.sleep(0.2)
- Place:
# 如果pick成功,则进入place阶段
if result == MoveItErrorCodes.SUCCESS:
result = None
n_attempts = 0
# 生成放置姿态
places = self.make_places(place_pose)
# 重复尝试放置,直到成功或超过最大尝试次数
while result != MoveItErrorCodes.SUCCESS and n_attempts < max_place_attempts:
n_attempts += 1
rospy.loginfo('Place attempt:' + str(n_attempts))
for place in places:
result = arm.place(target_id, place) # 上层的操作接口
if result == MoveItErrorCodes.SUCCESS:
break
rospy.sleep(0.2)
if result != MoveItErrorCodes.SUCCESS:
rospy.loginfo('Place operation failed after ' + str(n_attempts))
在上面使用了非常上层的接口PICK/PLACE,其中具体怎么样去夹,怎么样去放,我们不知道其内部实现。
这里有一个疑问是,Pick和Place都是对于机械臂本身的,并没有涉及夹具的open,close操作,那它是怎么完成抓取放置这些动作的呢?
4、ROS中的机器视觉
参考https://www.guyuehome.com/262?replytocom=49154
ROS中的图像数据
图像数据消息类型如下图:
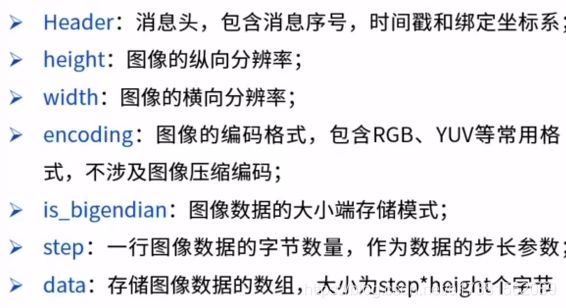
针对压缩图像CompressedImage

针对点云PointCloud2

摄像头标定
摄像头这种精密仪器对光学器件的要求较高,由于摄像头内部与外部的一些原因,生成的物体图像往往会发生畸变,为了避免数据源造成的误差,需要针对摄像头的参数进行标定。ROS官方提供了用于双目和单目摄像头标定的功能包——camera_calibration。
ROS官方单目标定教程
或许可以拿笔记本自带摄像头试试内参标定(后面再试试)
这里提到的是内参标定,还需要外参标定,即眼在手上或眼在手外。
安装标定功能包
sudo apt-get install ros-melodic-camera-calibration
简要过程:
- 启动摄像头,读取摄像头视频信息
sudo apt-get install ros-melodic-usb-cam
roslaunch usb_cam-test.launch
rqt_image_view
这个时候 调用的是你自己的笔记本上的摄像头,要去launch文件中把video0改成video1就可以调用外接摄像头啦!(一般默认笔记本自带摄像头是video0)
- 启动标定程序,eg:
rosrun camera_calibration cameracalibrator.py --size 11x8 --square 0.03 image:=/usb_cam/image_raw camera:=/usb_cam # size:标定棋盘格内部角点个数,这里使用的棋盘格一共有8行,每行11个 # square:每个棋盘格的边长,单位米 # image、camera:设置摄像头发布的图像话题 - 如果是Kinect等深度相机,除了彩色摄像头还有红外深度摄像头,还需要进行一次标定
- 摄像头使用标定结果文件(.yaml),在启动摄像头的Launch文件中添加参数
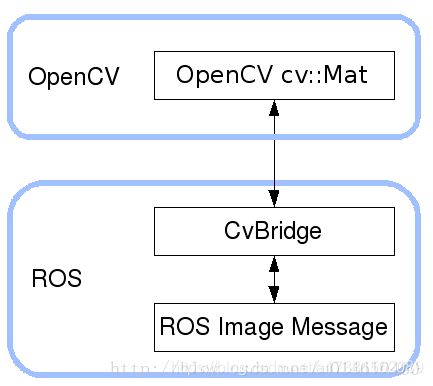
ROS+OpenCV
sudo apt-get install ros-melodic-vision-opencv libopencv-dev python-opencv
主要是通过CVBridge将ROS的图像数据转换成OpenCV的图像格式,进行图像处理后,再将OpenCV格式的图像数据转换成ROS图像消息,发布。
CVBridge官方教程:介绍了如何转换
imgmsg_to_cv2():将ROS图像消息转换成OpenCV的图像数据;
cv2_to_imgmsg():将OpenCV格式的图像数据转换成ROS图像消息;
ORK(Object Recognition Kitchen)
ORK是ROS集成的物体识别库,其中有很多物体识别算法,如LineMod。
5、Moveit!视觉集成
首先阐述一下我对这一块的理解,即它存在的意义。当在gazebo中仿真kinect模型时,可以获得仿真世界的RGBD信息,而这些信息Moveit!是不知道的,即在rviz界面是没有仿真物体的。这个时候可以添加相应的配置,利用Moveit!的场景监听器,将点云等数据传给Moveit!,使Moveit!将这些物体纳入路径规划。
这一步应该是十分重要的,与此前我做的将机械臂移动到已知的指定位置完全不同。
需要两步:
- 修改Moveit配置包config文件夹中的sensors_3d.yaml如下
# The name of this file shouldn't be changed, or else the Setup Assistant won't detect it
sensors:
- sensor_plugin: occupancy_map_monitor/PointCloudOctomapUpdater
point_cloud_topic: //kinect_V2/depth/points
max_range: 5.0
frame_subsample: 1
point_subsample: 1
padding_offset: 0.1
padding_scale: 1.0
max_update_rate: 1.0
filtered_cloud_topic: filtered_cloud
- 修改配置包launch文件夹中的ur5_moveit_sensor_manager.launch.xml修改如下:
<launch>
<rosparam command="load" file="$(find ur5_single_arm_moveit_config)/config/sensors_3d.yaml" />
<param name="octomap_frame" type="string" value="base_link" />
<param name="octomap_resolution" type="double" value="0.04" />
<param name="max_range" type="double" value="5.0" />
launch>
其中第二个参数是你想要将八叉树地图发布在那个坐标系,第三个参数为方格的分辨率,最后一个为显示范围。
这里有碰到一个奇怪的现象,设置octomap_resolution为0.05时,运行grasp_demo.py,机械臂到不了预定位置,设为0.04,0.03时又可以,初步猜测为0.05精度太低,在本应到达的抓取位置会与物体相碰,就没有执行到那步路径?
同时由于kinect2把待抓取物体也纳入了障碍,导致要抓取的那一步规划出错。
综合来看,要实现Pick&Place需要以下几步:
- 摄像头标定(内参,外参)
- 物体识别
- 抓取姿态分析
- 机械臂运动规划
后记
在对Moveit和ros的使用流程有了基础认识之后,就要开始涉及整个完整的系统流程了,希望自己还能加油。想一想还有哪些没有完成:
- 相机标定(内参,外参)
- 一些坐标系之间的关系,还需要多实践加强认识
- 结合视觉,识别物体,生成抓取姿态,完成pick&place
- 以及最重要的如何将深度学习生成得到的抓取姿态与ros结合